
工业机器人在缝纫机铸件加工中的应用
2014-02-14 08:49:24于晓东孙震礼杨宁
机器人技术与应用 2014年4期
于晓东 孙震礼 杨宁
(安徽埃夫特智能装备有限公司,安徽芜湖,241000)
编 者 按
安徽埃夫特智能装备有限公司是我国机器人领域的一颗耀眼新星,公司成立于2007 年,注册资本1 亿元,是专门从事工业机器人、大型物流储运设备及非标生产设备设计和制造的高新技术企业。在短短的几年时间里,埃夫特实现了从科研到产业的顺利拓展,先后牵头承担工信部国家科技重大专项2 项,科技部863 计划项目4 项,发改委智能制造装备发展专项3 项,安徽省科技攻关项目3 项,获得国家科技进步二等奖1 项,参与制定机器人行业国家标准1 项。公司研制的国内首台重载165kg 机器人载入中国企业创新纪录,荣获2012 年中国国际工业博览会银奖。
目前,埃夫特公司的产品已广泛应用到汽车及零部件、家电、电子、卫浴、机床、机械制造、日化、食品和药品、光电、钢铁等行业,同时出口到韩国、南非等地。为让行业内外更多人士更好地了解埃夫特,本期集中介绍该公司的几个应用案例以飨读者。
0 引言
在缝纫机头加工领域,生产自动化水平多年停留在较低层次,整个机头加工过程多采用人工进行上下料工作,危险度大、效率低、次品率高,而且随着人员成本不断上涨,加工产品的利润率越来越低。为了提高产品性能,降低人工在生产过程中的不利因素,部分生产厂家开始使用机器人替代人工进行机头的上下料工作。
机器人作为智能装备,具有精度高、稳定性好、柔性化高等特点,使用机器人不但可以减低人员成本,提高设备利用率,还可以有效控制产品质量。本文以安徽埃夫特智能装备有限公司开发的ER50-C20 工业机器人为例,通过仿真软件,规划机器人工作轨迹路径,实现机器人搬运缝纫机头坯料进行机械加工。结果显示,使用机器人进行上下料不但改善了产品质量,而且在减轻员工劳动强度的同时,还减低了对员工生产技能的要求。
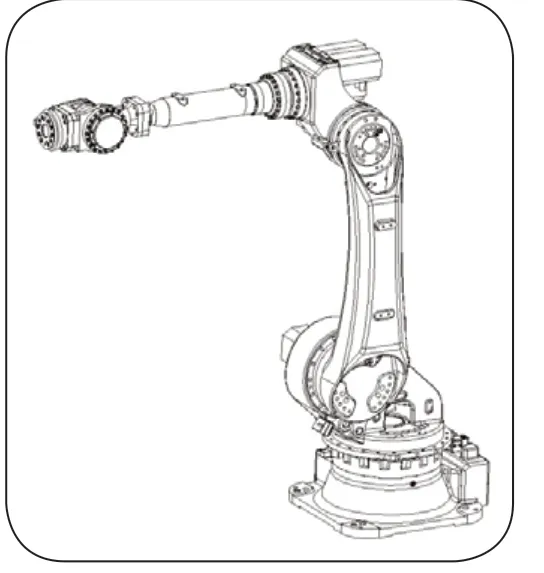
图1 ER50-C20 机器人模型
1 机器人结构及参数
机器人主要由机械本体、驱动部分、计算机控制系统、传感系统、输入/输出系统接口几部分组成。本文介绍使用的是ER50-C20 机器人,该机器人为6自由度串联机器人,见图1,主要参数如图2 所示。
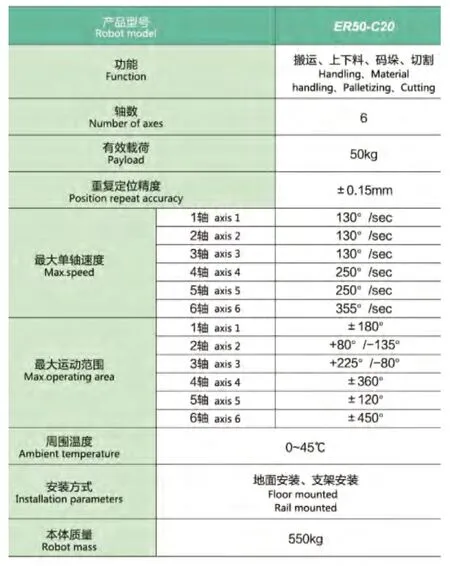
图2 ER50-C20 机器人主要性能参数
2 项目工艺分析
2.1 工位叙述
整个缝纫机头加工项目的工艺如下∶
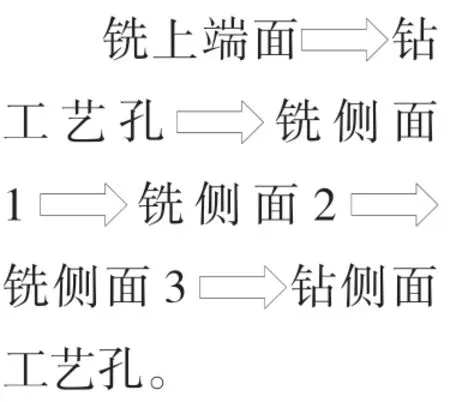
以上共计6 道工序18 台机床。
在该项目中,机器人末端采用柔性补偿器抓手,并附带气路单元、主站PLC 等。
根据缝纫机加工工艺以及机床尺寸,整个加工过程共计分为7 个工位:第一工位为人工上料工位,主要进行拆垛以及输送;第二工位用1 台机器人服务4 台机床;第三、四工位每台机器人各服务2 台机床;第五、六工位每台机器人各服务4 台机床;第七工位1 台机器人服务2 台机床,并将加工好的产品进行码垛。
工位间通过转料台转料,第一工位为输料台输送坯料,整线采用PLC 控制,PROFIBUS 总线通信,平均上下料节拍为25s。详细布局图如图3 所示。
整个工位设备包括:输送料道、ER50-C20 机器人、机器人用柔性抓手、按钮盒、PLC 控制系统、安全防护。
2.2 末端执行机构
根据项目工艺要求,末端执行机构采用柔性抓手,即抓手与机器人之间通过柔性补偿器连接。
在加工过程中,机床加工要求工件定位精度为0.03mm,定位精度要求较高,而机器人将工件放置于工位的重复定位精度为±0.15mm,如果只采用机器人进行定位则无法满足精确定位的加工要求。为此,项目引入柔性补偿机构,如工件与机床工装配合存在位置偏差,柔性补偿器将主动从不同角度对机器人进行补偿,减小工作定位销对机器人的硬接触力。
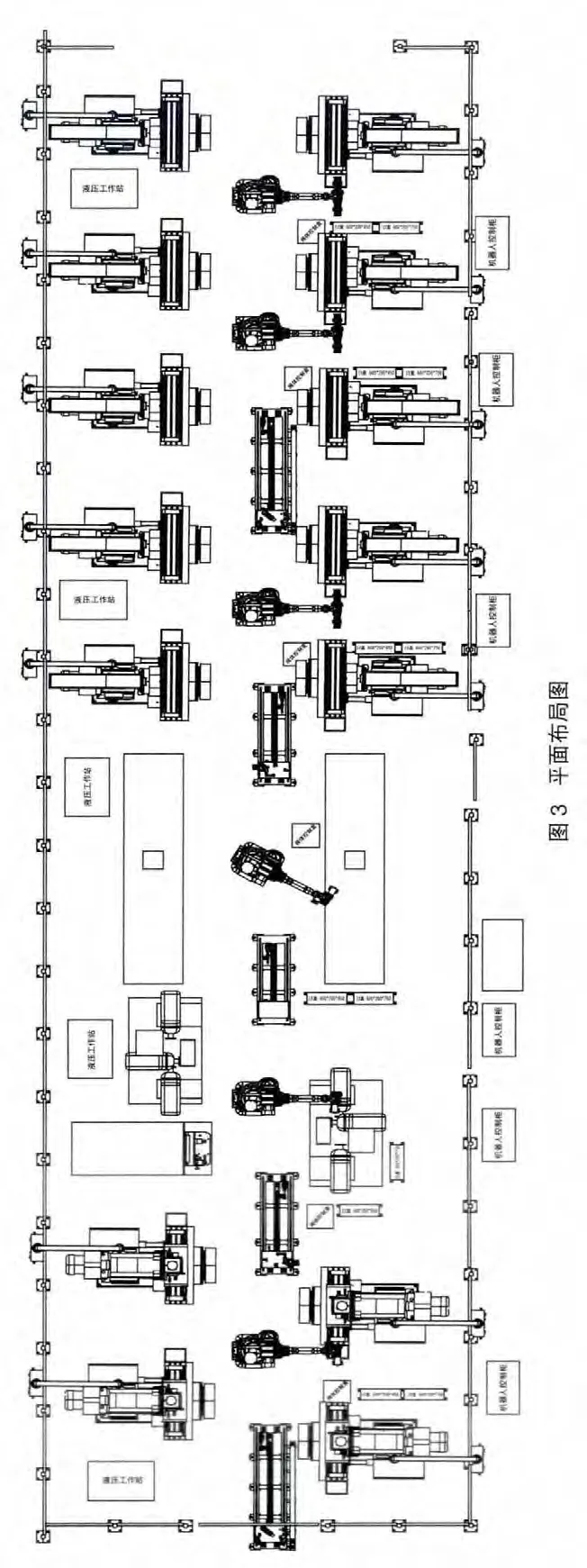
图局布面平 3图
柔性补偿器的使用,不但可以避免机器人与机床工装硬接触导致的机器人过载,还可以减小机床上工装定位销的磨损,高效实现高精度产品的上下料工作。
机器人抓手根据厂家提供的产品数模或实际样品进行设计,样图如图4 所示。
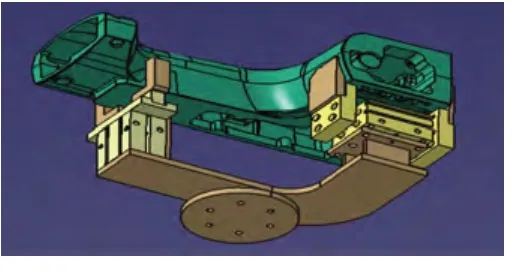
图4 机器人抓手
3 控制系统
3.1 系统控制
系统控制逻辑图如图5 所示。
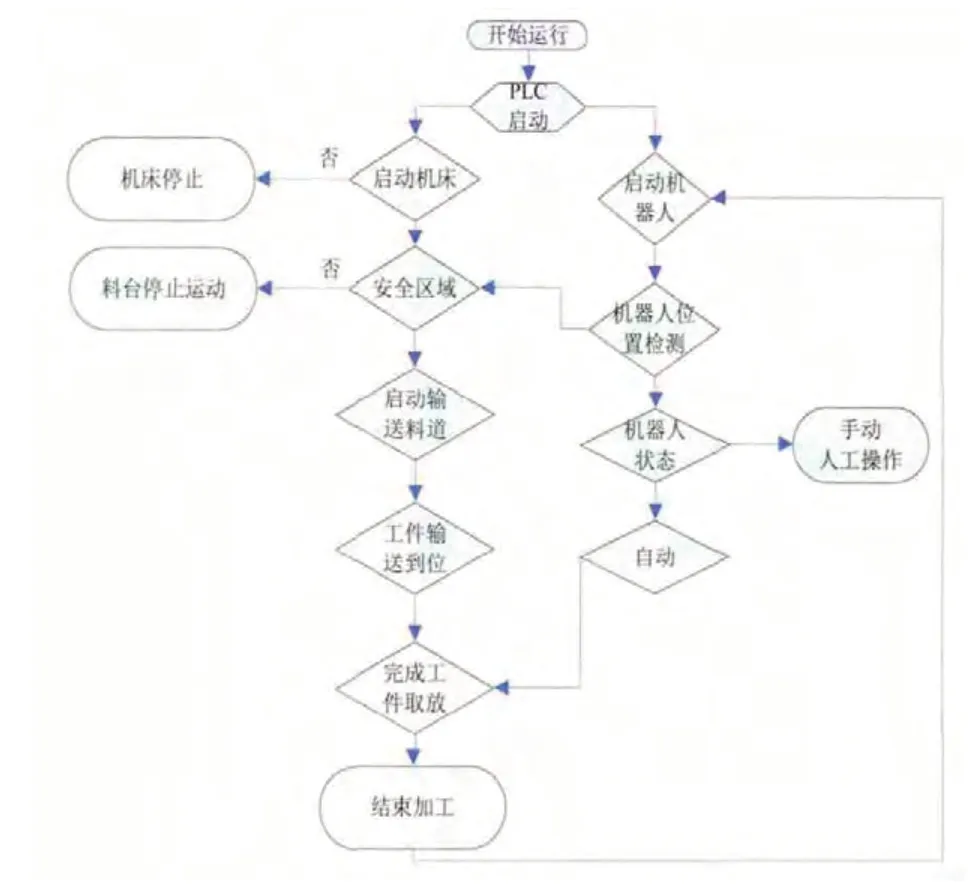
图5 系统控制流程图
整个项目采用PLC 作为主控单元,PLC 通过控制独立的机器人系统以及机床系统进行协调作业。操作人员通过人机交互界面操作以及监控机器人的状态。
在自动状态下,操作人员只需操作按钮就可实现生产线的启动和停止。具体控制过程是:将电控系统上电;启动PLC;PLC 控制机器人以及机床进行自检。
机床进行自检时,如果有故障,机床将停止;此时,机器人检测是否在等待工作位置,如不在工作位置将停机。
如果自检机器人以及机床均在指定位置,机器人、料道以及机床将进行协调作业,完成一次工作,自动进入下一次循环。
3.2 工位布局仿真
项目在具体实施前,要使用DELMIA 离线仿真软件,对现场机器人进行三维布局,验证机器人柔性抓手以及机器人之间是否存在干涉;同时,根据仿真结果测算机器人工作节拍,确认机器人底座高度,各个机床摆放位置,验证机器人可达范围,保证机器人与机床之间最大有效服务距离等。
详细仿真图如图6 所示。
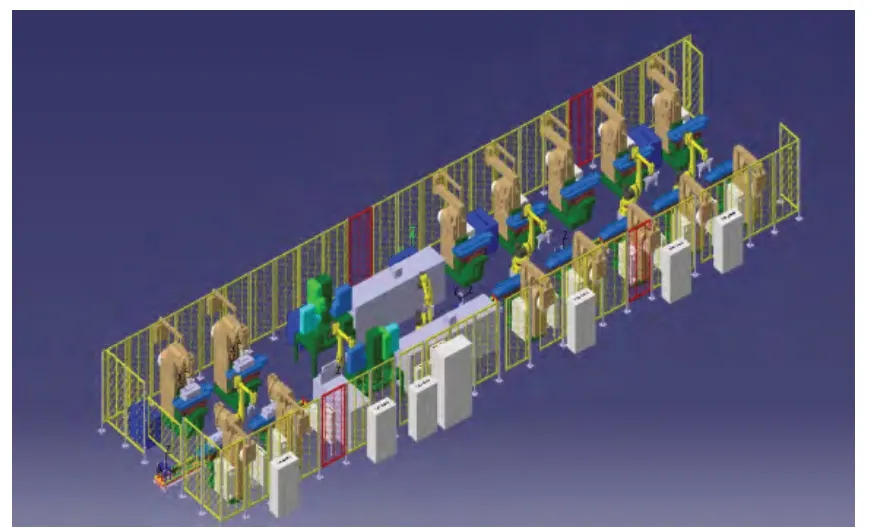
图6 机器人三维布局图
3.3 机器人示教
通过现场对机器人轨迹的记录,进行机器人位姿修改、I/O 信号设置,完成机器人与机器人的配合。初次调试后,整个项目会优化机器人运动轨迹,删除部分多余运动轨迹点,缩短机器人信号通信时间,提高机器人工作效率,并通过设置机器人干涉区,防止机器人间以及机器人与机床的潜在碰撞,提高生产线稳定性。
当两台机器人存在潜在碰撞危险时,优先运动的机器人发出干涉区信号,防止其他机器人进入潜在碰撞区。
4 总结
使用机器人进行缝纫机头生产并上下料,不但可以降低员工劳动强度,还可以提高产量,降低产品在生产过程中存在的潜在风险;使用机器人生产缝纫机头,不但加工精度得以保障,而且废品率也大幅降低,产品一致性以及质量远远好于人工生产的产品。
[1] 郭继红.工业机器人技术[M].西安∶西安电子科技大学, 2006.
[2] 蔡自兴. 机器人学基础[M].北京∶机械工业出版社,2009.
[3] 孙树栋.工业机器人技术基础[M].西安∶西北工业大学出版社. 2006.
[4] 王广雄,何联.控制系统设计[M].北京∶清华大学出版社,2007.
猜你喜欢
中国新闻周刊(2023年42期)2023-12-03 14:39:41
河南农业·综合版(2022年3期)2022-04-08 21:25:43
物流技术与应用(2020年5期)2020-06-25 02:48:12
意林(2020年10期)2020-06-01 07:26:37
趣味(语文)(2018年8期)2018-11-15 08:53:00
扣篮(2018年9期)2018-10-11 06:13:16
少年博览·小学低年级(2017年8期)2017-09-29 17:37:39
作文通讯·高中版(2016年3期)2016-04-22 09:11:36
杭州(2015年9期)2015-12-21 02:51:49
中国农资(2015年49期)2015-08-09 10:45:52
