数控机床永磁伺服电机绕组串并联换接性能实验研究
2014-02-10 02:56包西平
机电工程技术 2014年10期
包西平
(徐州工业职业技术学院机电工程技术学院,江苏徐州 221140)
数控机床永磁伺服电机绕组串并联换接性能实验研究
包西平
(徐州工业职业技术学院机电工程技术学院,江苏徐州 221140)
为提高数控机床永磁同步电机调速比,提出了绕组串并联换接的方案。阐述了绕组串并联换接的实现方法,对串并联换接造成电机参数和运行性能的变化进行了理论分析。搭建了实验平台,对绕组串联、并联及串并联换接电机在电流、电压、转矩等方面进行实验和分析。通过实验可知,在工艺条件许可的情况下绕组串并联换接是扩展运行范围的有效方法之一。
永磁同步电机;绕组串并联换接;切换点;实验
0 引言
数控机床高性能永磁同步伺服电机(High Per⁃formance PMSM)因能够实现高速、高精度、高稳定度、快速响应、高效节能的运动控制而在数控伺服传动系统中得到了广泛的应用。在数控机床中永磁同步伺服电机的运行工况却非常复杂,既有可能在低速区域运行,也有可能在高速区域运行。伺服电机在低速区域运行对转矩波动非常敏感,降低转矩波动、提高运行的平稳性是低速运行的基本要求。而对于伺服电机高速运行,如何提高永磁同步伺服电机高速运行的输出转矩,是高速运行的重要要求。
采用合适的电流控制方法[1-3],也可以在一定程度上提高电机的输出转矩,但其性能的提高,特别是高速运行时转矩输出能力的提高受电机凸极率及弱磁率的限制,转子结构未经特殊设计的永磁同步电机其“弱磁扩速”效果是非常有限的。
随着新型电流控制算法的涌现、新材料的应用以及转子结构的改进,永磁同步伺服电机控制性能可得到进一步的提高。但如何在当前技术条件下,将永磁同步伺服电机调速比大幅度提高,特别是提高高速运行时的输出转矩,满足高精度数控机床高性能永磁同步伺服系统的要求,是更加迫切的问题[4]。本文提出采用定子绕组换接的方法解决这一难题,只要稍微改进电机和驱动系统,在现有条件下就可以大幅度提高数控机床永磁同步伺服系统的性能。
1 定子绕组串并联换接的实现
要实现永磁同步电机定子绕组的串并联换接,须将电机每相设计成两套完全相同的绕组,低速运行时两套绕组串连,高速运行时两套绕组并联,如图1所示。这样在低速运行时,由于绕组串联匝数多,磁链值高,电机转矩大。在高速运行时,每相绕组匝数少,磁链值低,一方面电机转折转速高,降低了弱磁扩速的要求;另一方面还能提高高速区域的输出转矩。

图1 绕组的串并联换接
绕组切换的过程包括三个阶段,即电流由最大值降为零的时间t1、开关器件的开闭时间t2及电流由零升为最大值的时间t3。整个换接时间为t1+t2+t3。因此对某一具体的系统来说,绕组串并联换接过程具有确定的时间长度,所以换接时无需检测绕组电流大小,只需根据预定的时间进行切换即可。图2是绕组具体的连接电路,开关器件采用IGBT(保护电路未画出),串联运行时每相的K1、K3断开,K2闭合;并联运行时K1、K3闭合,K2断开。并联和串联状态之间需要加入一个死区以避免短路。

图2 换接电路
永磁同步电机绕组串并联换接运行的转矩特性如图3中粗实线OA1FA2D2所示。其中nbs、nbp(分别对应A1和A2)为绕组串联、并联运行时的转折转速。启动时,绕组串联沿OA1运行至A1点(对应转折速度nbs),电机电压达其极限电压,此时将绕组换接成并联运行,沿FA2运行至A2点(对应转折速度nbp),此过程仍然为恒转矩运行,至A2点时电机电压又达极限电压,如仍需继续提高速度,则须进行弱磁控制,弱磁控制运行时电机沿A2D2曲线运行。
2 绕组串并联换接对电机参数影响分析
电机绕组的串并联换接必然改变电机的基本参数,如电阻、电感及磁链等参数,在电机电压、电流极限不变的情况下,电机参数的变化必然带来输出转矩、转折转速等性能的变化。如果将每相绕组分成两组,绕组换接前后,两组间的连接关系发生了变化,因此,根据电工学原理可以推导出换接前后电机基本参数间的关系如下。
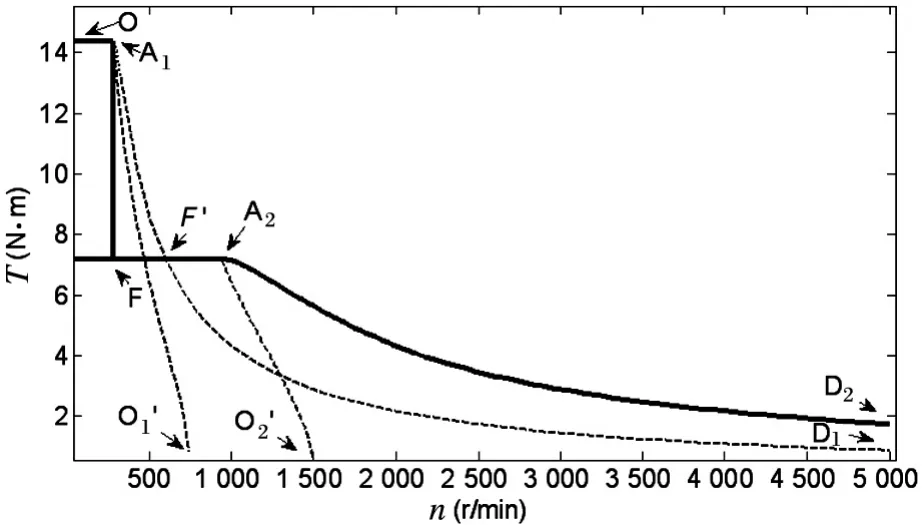
图3 绕组串并联换接运行时的转矩特性

其中下标s代表串联,p代表并联。显然,定子绕组由串联变换为并联后,绕组电阻、dq轴电感分别降低至原来的四分之一,磁链降低至原来的二分之一。由于绕组并联时电机运行于高速区域,而电机高速运行时,电阻压降和反电动势相比很小,因此为了简单起见,不计电阻,可得:

其中:

可以看出,在电流不变的条件下,定子绕组由串联变换为并联后,电磁转矩变小,转折速度变大。其中永磁转矩变为原来的二分之一,磁阻转矩变为原来的四分之一。对于永磁同步伺服电机,常采用隐极结构,有Ld=Lq的关系,输出转矩中只包含永磁转矩,此时转折速度变大,而转矩降为原来的二分之一。因此可以初步得出以下结论:永磁同步伺服电机如果按照定子绕组串联运行设计,确保了中低速运行的性能,当需要高速运行时,通过外电路切换至并联运行状态将有利于提高转折速度,提高输出转矩,改善高速运行性能。这样根据运行工况,通过定子绕组串并联切换的办法将有效扩展永磁同步电机运行速度范围,改进伺服系统的性能。
3 绕组串并联换接的实验研究
为验证以上研究结果的正确性,对绕组串并联换接运行和绕组串联运行、绕组并联运行三种情况进行了对比试验,为了便于描述起见仍然将三台电机分别称为m0、m1和m2电机。
3.1 实验平台
实验平台和实验主要装置如图4、图5所示,实际上是一种基于PC的计算机测控系统[5-6],由永磁同步伺服电机(实验时m0、m1和m2三台分别装入试验台)、编码器、伺服驱动器、磁粉制动器、转矩传感器、电量变送器、转矩转速仪、电参数采集仪、计算机以及数据采集软件构成[6-7]。其中m0电机为某公司生产的110ST-M02020型永磁同步伺服电机,额定转矩2.2 N·m,额定转速2 000 r/min,极对数为4,转子采用面装式永磁体,永磁体牌号为N35SH,定子、转子材料均采用DW465_50硅钢片,定子绕组采用星形连接。
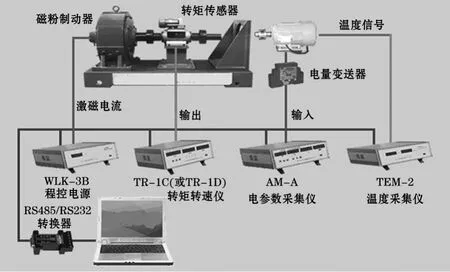
图4 实验系统构成

图5 试验电机、力矩传感器与磁粉制动器

图6 串并联变换电路(对应电机一相绕组)
两套绕组串并联的变换,采用开关频率较高的电力电子器件。图6是实验电机一相绕组的电路,SB1、SB2和SB3是三个IGBT器件(保护电路未在图中画出),串联运行时SB1、SB3断开,SB2闭合;并联运行时SB1、SB3同时闭合,SB2断开。并联和串联状态之间需要加入一个死区时间,以避免短路发生。死区时间可取大约0.000 1秒,对应于功率器件的开关频率为10 kHz。
3.2 实验结果
实验工况分为空载实验和负载实验,速度给定值均为6 000 r/min。每一种工况均对绕组串联运行、绕组并联运行和绕组串并联换接运行三种情况进行对比实验,将转速、输出转矩在三种情况下的结果叠加,在一张图上显示出来。
(1)空载实验
实验结果如图7所示。
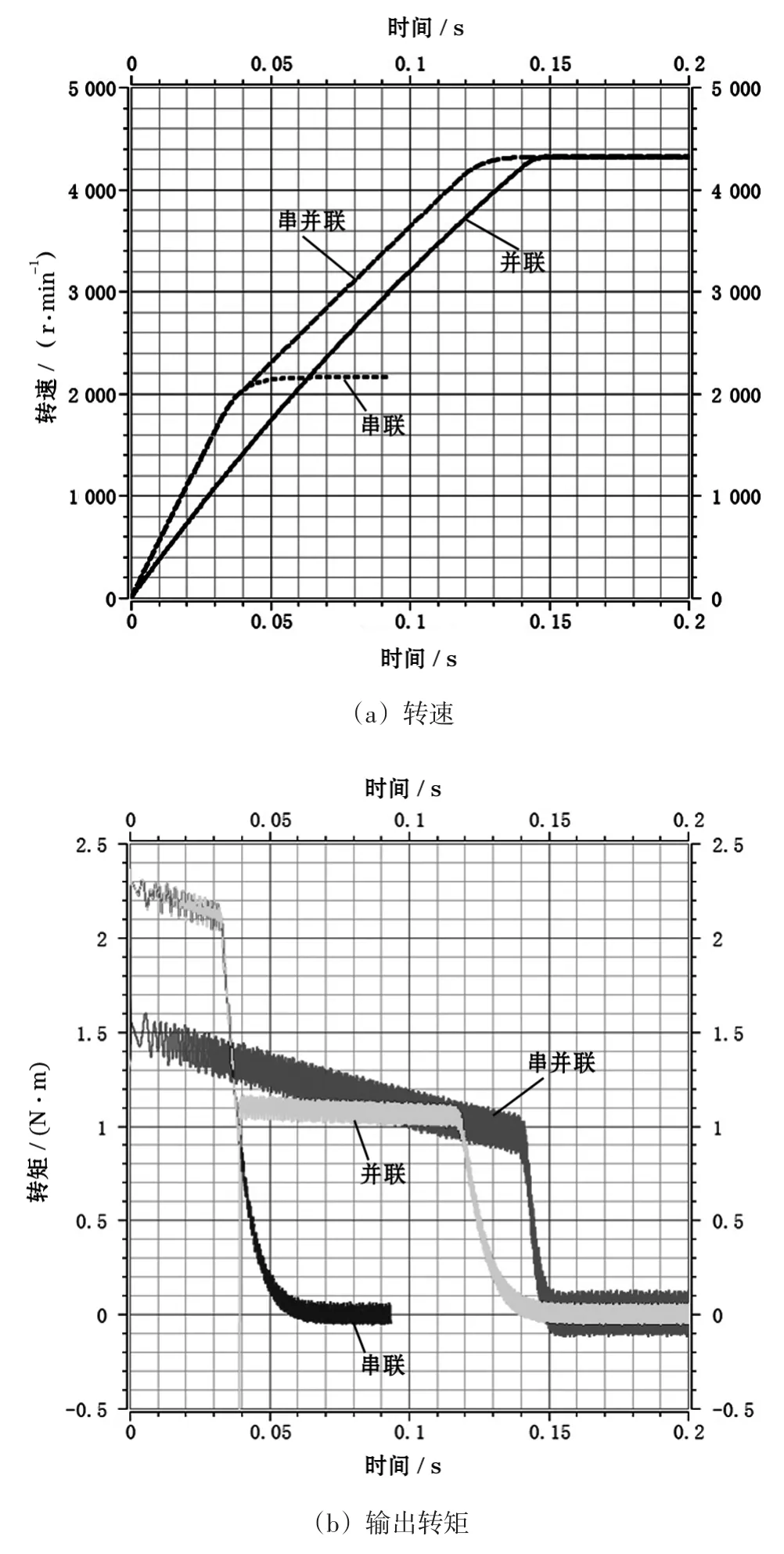
图7 串联、并联与串并联切换电机比较
(2)负载实验(负载转矩为0.8 N·m)
实验结果如图8所示。

图8 串联、并联与串并联切换电机比较
从图可见,绕组串联运行最高转速2 158 r/ min,并联运行最高转速达4 324 r/min,并联运行最高转速约为串联运行最高转速的两倍左右,但在切换点以前的低速区,串联运行转速上升更快,说明其在低速去转矩输出能力更强。串并联切换电机在低速区其转速—时间特性和串联运行电机完全一致;转速超过串并联切换点后,运行的趋势基本和并联运行相平行,但速度上升更快,因而在高速区串并联切换电机要比单纯并联运行电机输出转矩的能力强,而其所能达到的最高转速则和绕组并联电机相同。
负载工况的实验结果和空载工况的实验结果基本一致,由于存在负载转矩,因此电机的加速度减小,加速时间延长,和空载工况相比,其结果曲线相当于在时间上向后发生了平移。
在空载和负载实验中输出转矩在切换点处均发生了大幅度的跌落,这是由于切换时电流失控造成的,失控的时长为开关管开关时间与死区时间之和。同时为了研究电机运行状态对切换点的敏感性,切换时间均滞后了大约10%,但从以上实验结果来看,无论是切换时的电流失控还是切换点的滞后均没有对电机的运行状态产生明显的影响。这主要是因为一方面电流失控时间和切换滞后时间均非常短,另一方面电机转子本身转速很高,且有一定的惯性,因而对这种短暂、单次的扰动并不敏感。
4 结论
文中论述了永磁同步电机绕组串并联换接的实现方法,对串并联换接造成电机参数的变化、换接前后电机性能的变化进行了理论分析。通过实物实验,可以得出以下结论:绕组串并联换接可以在兼顾低速与高速性能的前提下大幅度扩展永磁同步伺服系统的运行范围,换接的时刻、换接过程对电机运行状态的影响并不显著,在伺服系统工艺条件许可的情况下绕组串并联换接是扩展其运行范围的有效方法之一。
[1] P Vaclavek,P Blaha.Interior permanent magnet syn⁃chro-nous machine field weakening control strategy-the analytical solution[C].Proceeding of international con⁃ference on electri-cal machines and systems,2007,Seoul,Korea:440-445.
[2] 吉智,何凤有.凸极永磁同步电机电流控制方法研究[J].电气传动,2011(7):3-7,24.
[3] 李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,25(21):169-174.
[4] Shigeo Morimoto.Servo drive system and control charac⁃teristics of salient pole permanent magnet synchronous motor[J].IEEE Trans.on Industry Appl.,1993,29(2):338-343.
[5] 吉智,何凤有,窦春雨.基于Matlab/Xpc Target的实时数据采集系统设计[J].工矿自动化,2009,158(5):74-77.
[6]王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006.
Performance Study Through Winding Series-Parallel Switching of Permanent Magnet Synchronous Motor
BAO Xi-ping
(Xuzhou Industrial and Vocational Technology Institute,Machinery and Electricity Engineering Institute,Xuzhou221140,China)
In order to greatly improve the speed ratio of permanent magnet synchronous motor of NC machine tool,it was proposed to winding series-parallel exchange scheme in this paper.This paper discussed the realization method of winding series-parallel switching of permanent magnet synchronous motor.It was analyzed that series-parallel switching causes the change of motor parameters and performance in theory.The experimental platform was set up.The experiment and analysis in current,voltage,torque,etc,was realized for windings of series,parallel,series-parallel switching motors.The experiment showed that under the condition of the process permit,the winding series-parallel switching is one of the effective methods to extend the operating range.
permanent magnet synchronous motor;winding series-parallel switching;switching point;experiment
TM351
:A
:1009-9492(2014)10-0059-05
10.3969/j.issn.1009-9492.2014.10.016
包西平,男,1972年生,山东蒙阴人,硕士,讲师。研究领域:电机、电力电子及电力传动技术。
(编辑:向 飞)
2014-04-08
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
微特电机(2020年11期)2020-12-30
新世纪智能(英语备考)(2018年11期)2018-12-29
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
工业设计(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22