基于V模式的dSPACE电机控制器开发
2014-02-09 03:00:37张奇
实验室研究与探索 2014年11期
张 奇
(山东大学 控制科学与工程学院, 山东 济南 250061)
0 引 言
近年来,控制器性能飞速发展,产品的控制代码呈现爆炸性增长。早期第四代战机F35的软件代码就已高达800万行,而现在一台中高档汽车的执行代码也已超过1 000万行。在电机控制领域,一台电机的控制代码有时也达数千行。随着代码量的迅速膨胀,传统开发模式的缺陷日益明显,手工编程面临着产品开发周期拉长,开发成本倍增,可靠性难以保障等诸多问题,已很难适应当前社会对产品研发的要求[1]。
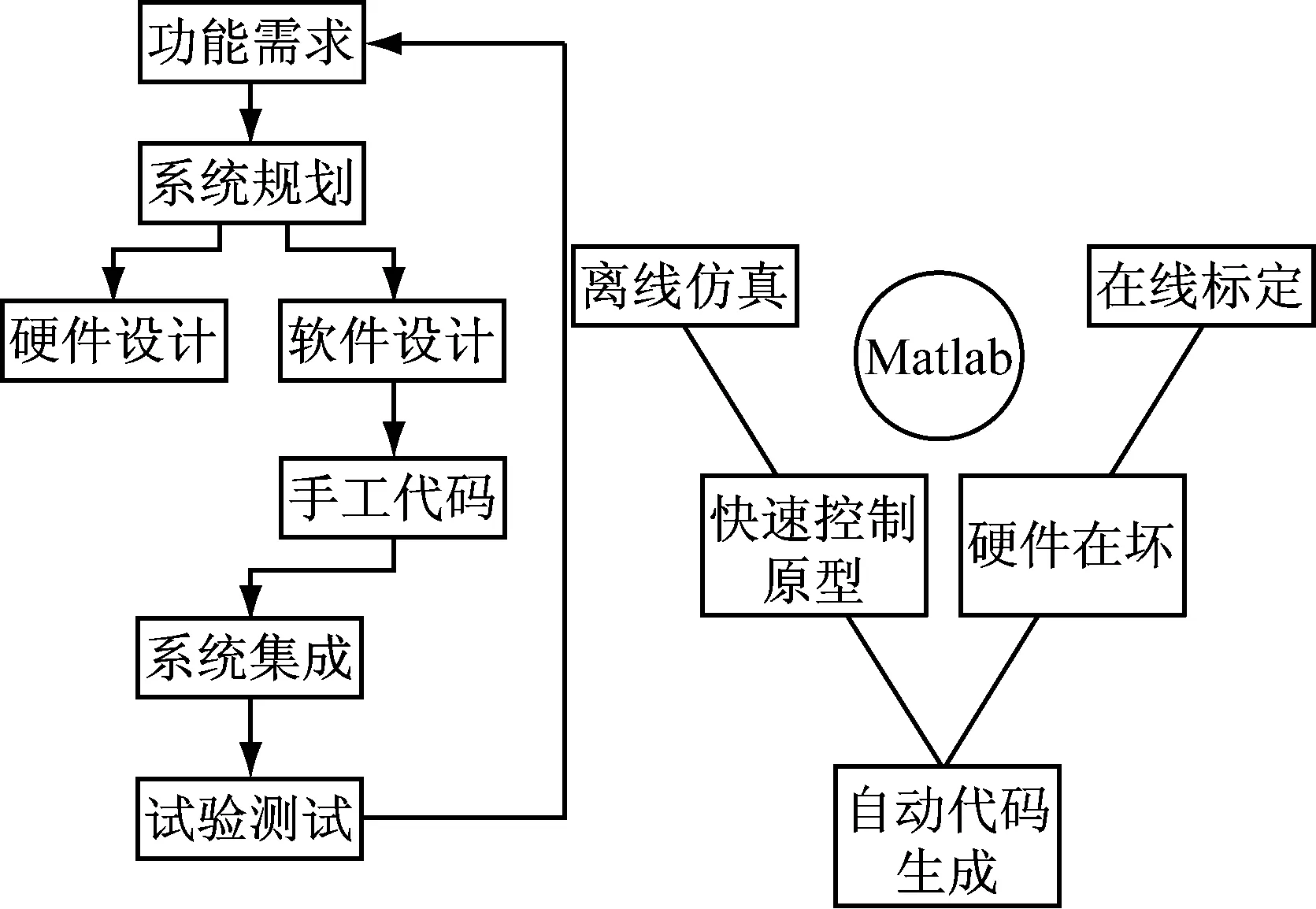
V模式流程解决了传统开发的诸多问题,逐渐成为航空航天、汽车、工业控制等行业广泛采用的控制器开发模式。其流程主要包括需求分析与离线仿真、快速控制原型设计、代码生成与原型在环、控制器硬件在环测试和在线标定等五个阶段。相比于传统的设计方法,如图1所示,基于V模式的各个阶段是相互关联在一起的,任何错误都能在同一平台解决,代码可采用 Code GeneratorTM、RTI等代码生成工具自动生成[2],缩减了手工编程所需的人力、物力和时间,开发者可以把主要的精力放在算法和测试用例的建模研究上[3]。本文基于V模式开发流程的思想,借助dSPACE实时仿真系统,实现了异步电机的矢量控制。
1 控制系统建模与离线仿真
需求分析与离线仿真阶段,主要是根据被控对象模型,搭建满足要求的控制器算法模型。
1.1 控制对象模型
异步电机在现代工业中应用广泛,在设计电机控制算法之前必须对其复杂的内部电磁关系有一个清晰的认识[4],根据异步电机物理模型的电压方程、磁链方程、电磁转矩方程和运动方程,可得到在两相同步旋转坐标系下的数学模型,建模过程较为简单,不再详述,异步电机的主要参数如表1所示。

表1 交流异步电机主要参数
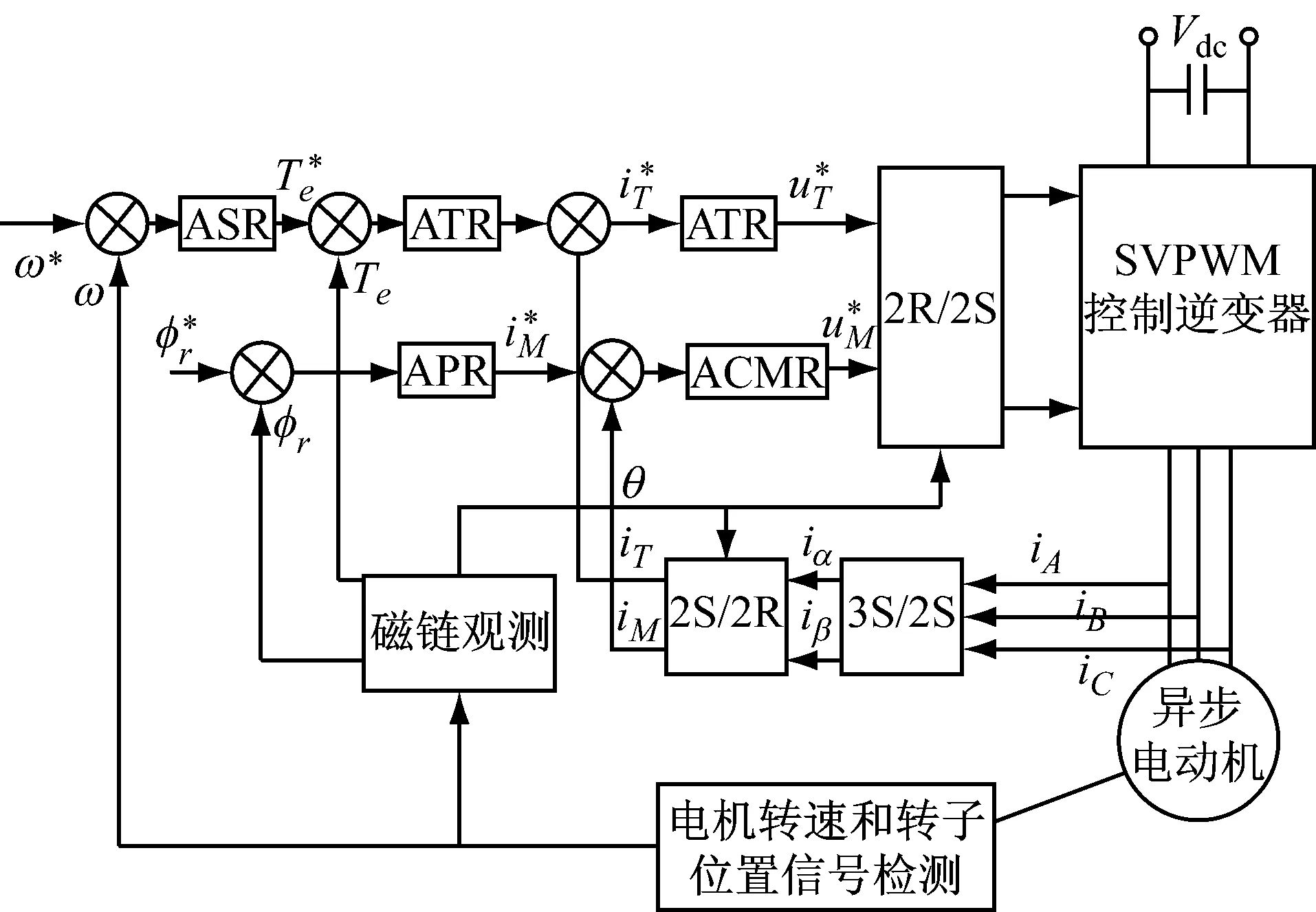
1.2 矢量控制器建模
矢量控制实现了交流电机调速范围宽、动态性能好、零速时输出额定转矩等高性能控制,应用广泛。
为了对比控制效果,建立了电流滞环PWM调制方式的三相电流闭环控制系统,其原理如图3所示。
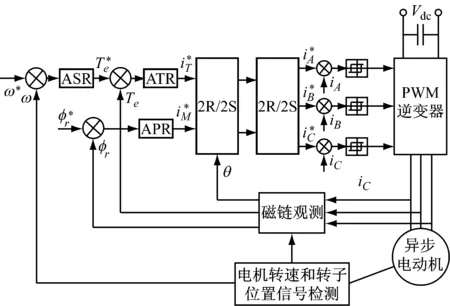
理论上讲,两者电流闭环作用相同,差异是后者一般采用硬件电路实现,多见于早期产品;前者可采用软件实现,随着控制器性能的不断提高,现代产品多采用软件电流闭环方式,可用dSPACE系统实现[5]。
1.3 仿真结果分析
电机模型的参数采用表1,仿真过程固定步长取1e-5。为验证转速响应速度和对转矩突变的抗干扰性,在电机带负载0.2 N·m的条件下,给定初始转速为92 rad/s,在0.06 s时给定转速变为200 rad/s,在0.12 s时突加负载转矩扰动0.4 N·m,仿真结果如图4、5所示。

图4 负载实验转速响应曲线
从仿真结果可知,两者的转速响应都很快,能够在很短的时间内达到期望的转速;电机运行过程中,当负载发生突变时,对转速的影响很小,系统抗负载扰动性能较强。电流滞环的矢量控制的转速响应更快,但存在较大的超调,究其原因,其采用电流两点式控制,动态响应快,但电流纹波相对较大; SVPWM调制方式的矢量控制因其采用连续的PI控制,转速响应较慢,但超调很小,一般来说电流纹波也略小。
从转矩响应曲线可知,在负载转矩和扰动已知的情况下,三相电流闭环矢量控制对负载转矩变化的抑制能力较好,转矩响应快,但转矩稳态误差较大;转矩分量和磁链分量的矢量控制对负载转矩变化的响应较慢,但稳态精度较高。
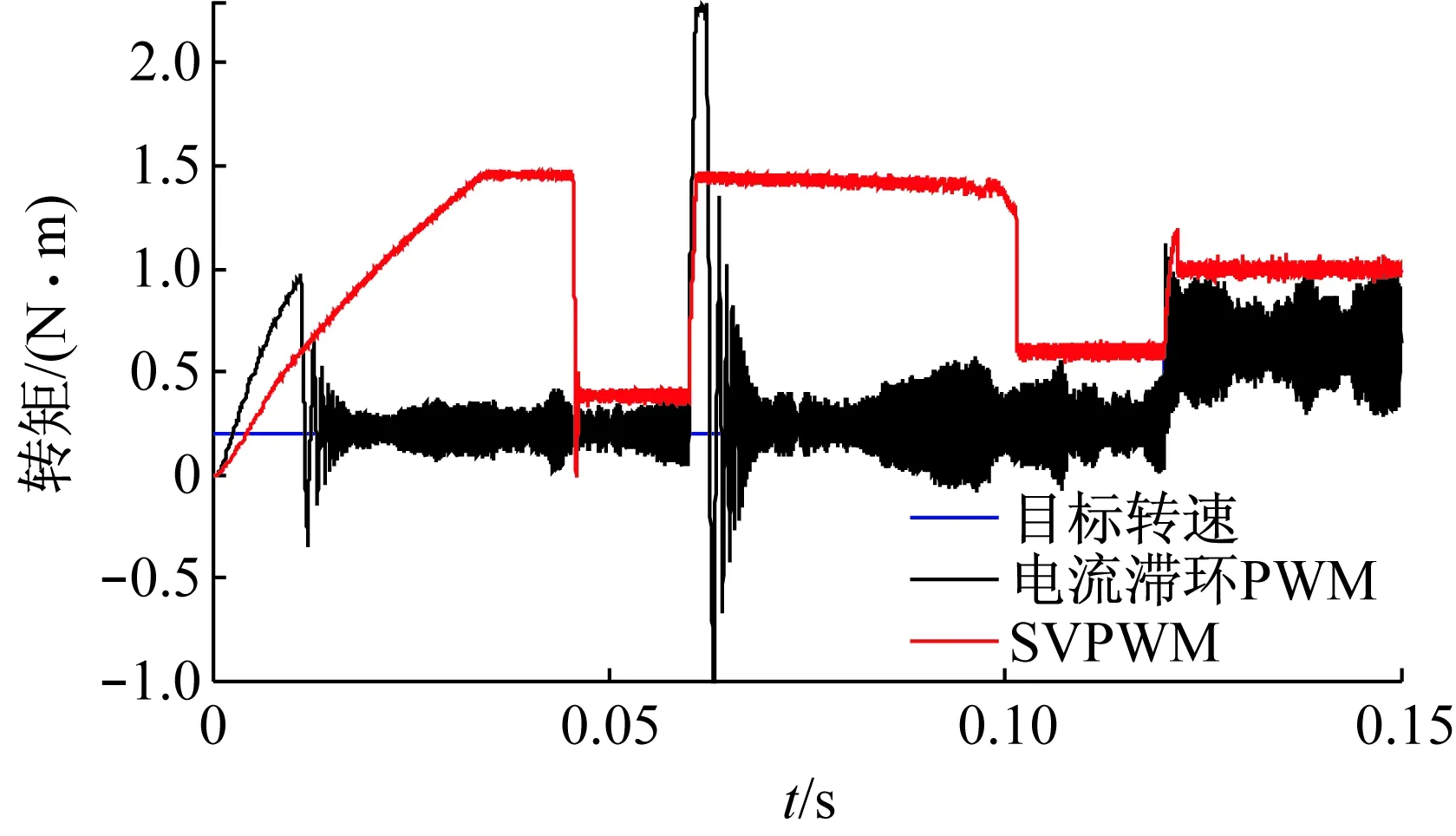
图5 空载实验转矩响应曲线
2 快速控制原型与自动代码生成
本文采用dSPACE实时仿真系统MicroAutoBOxII取代以往的单片机、DSP等,控制算法能够在线修正,实现电机控制器的快速开发[6]。
2.1 程序流程设计
系统程序首先完成对系统的初始化操作,包括dSPACE各硬件接口、编码器单元的初始化配置、全局变量初始化等,确定dSPACE的I/O及外围器件的初始状态,然后配置控制器参数,完成系统工作状态故障检测,若系统工作状态正常则进入正常的控制主程序。矢量控制程序根据转速、定子电流的采样数据,通过坐标变换与反变换、转差频率计算、数据处理等功能,完成了对电机转速、转矩的精确控制[7-8]。
2.2 实时快速控制模型
电机控制程序的实现,只需在建立的Simulink仿真模型的基础上,保留控制算法模块,用RTI的I/O接口模块替换原来的逻辑运算即可[9],如图6所示。
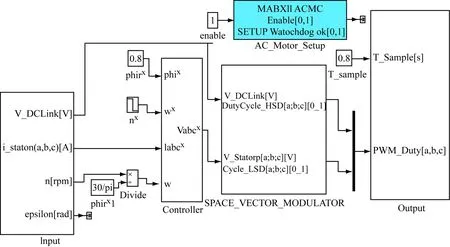
图6 dSPACE控制程序的实现
2.3 自动代码生成
通过RTW实现了控制模型到控制代码的自动生成与下载[10]。通过CCP编译器自动生成的部分C代码程序。与人工编写的代码相比,自动生成的C代码可读性不高,但结构紧凑,代码量少,容错性较好,精确度较高。通过对生成代码的头文件、配置文件的修改,可实现代码重用和可移植性,为快速在单片机、DSP等处理器中的应用提供了方便。
3 dSPACE硬件在环测试[11-14]
3.1 实验平台构成
控制器原型设计完成之后,需要在半实物仿真平台上进行硬件在环实验,实验平台由dSPACE实时系统、控制计算机、 电机及DR系列功率驱动器、位置/转速检测单元、调压器、磁滞测功机、上位机监控软件ControlDesk、数字示波器等组成,如图7所示。
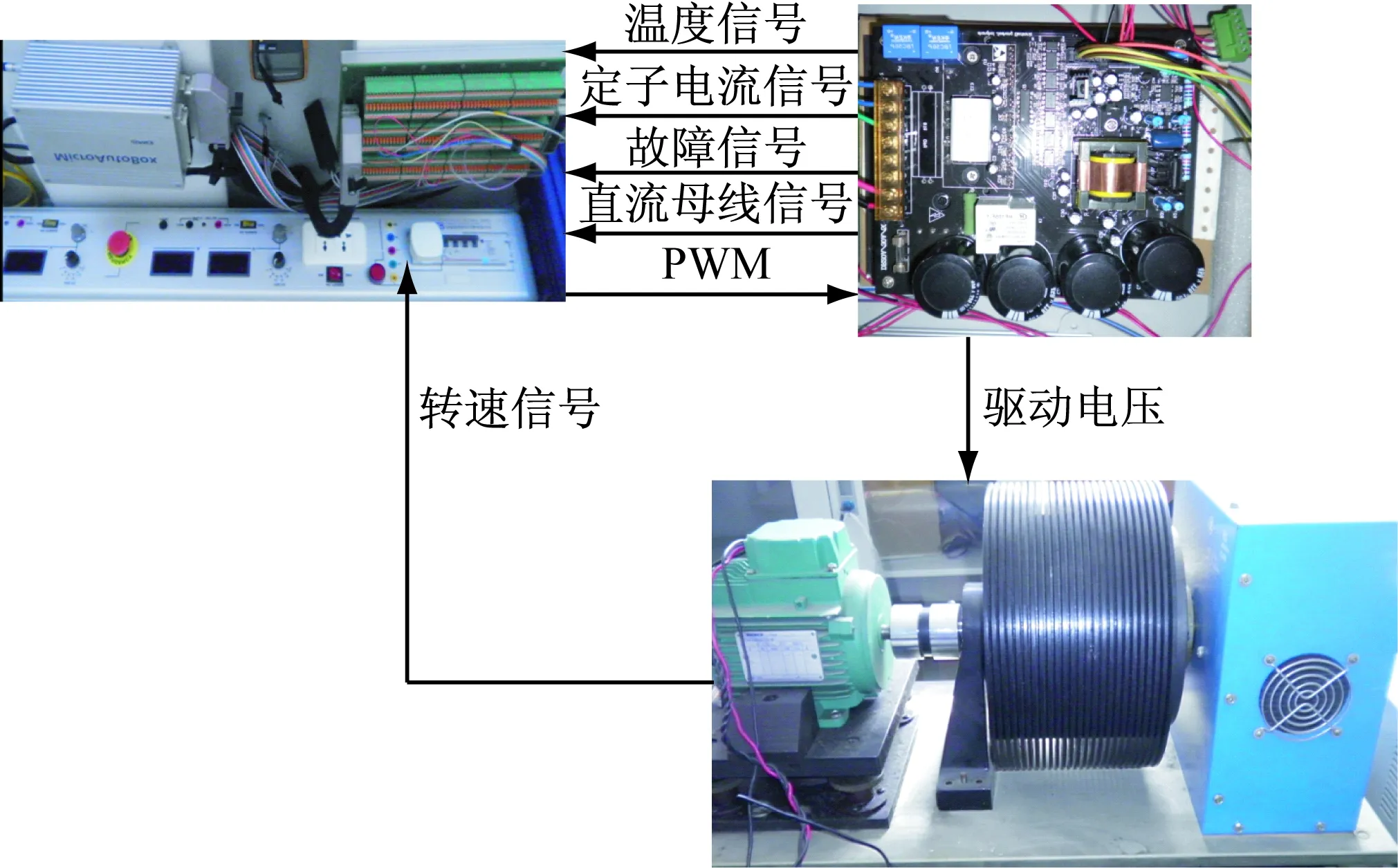
图7 实验平台硬件连接原理示意图

图8 ControlDesk编制的虚拟仪表监控和测试界面
传感器、编码器等实现了定子两相电流、直流母线电压、温度、转速的检测;由于dSPACE输出的PWM波为高电平有效,而IPM输入PWM的控制驱动信号为低电平有效,为保证死区电平为高电平,PWM必须先经过74HC14反相,才能控制IGBT的通断。当系统发生过载、过流等异常时,IPM保护电路在实施保护动作的同时,发出一个故障检测信号送到 dSPACE的数字量输入接口,触发dSPACE封锁PWM脉冲使系统停止工作,防止损坏电机和逆变器。
3.2 实验在线监控
使用RTW自动生成目标C文件、系统配置和描述文件后,用ControlDesk综合实验软件来实时监控程序运行、在线调整参数、绘制曲线、记录数据等[15]。
图8为使用ControlDesk编制的虚拟仪器监控测试界面,故障信号、系统和PWM输出使能状态、PWM输出占空比、三相电流、直流母线电压、转速、温度等都可以在线显示或修改。
4 实验结果分析
4.1 死区时间设置
为防止同相上下桥臂IGBT同时导通而烧毁IPM, 实验中根据IGBT的开关速度,设置死区时间为5 μs。由图9观测的PWM波形可知,a相上下桥臂的PWM控制通断的波形为互补模式,但两者之间有一定的相位差,即死区时间。同时74HC14不仅实现了PWM反相,而且消除了PWM的干扰和毛刺。
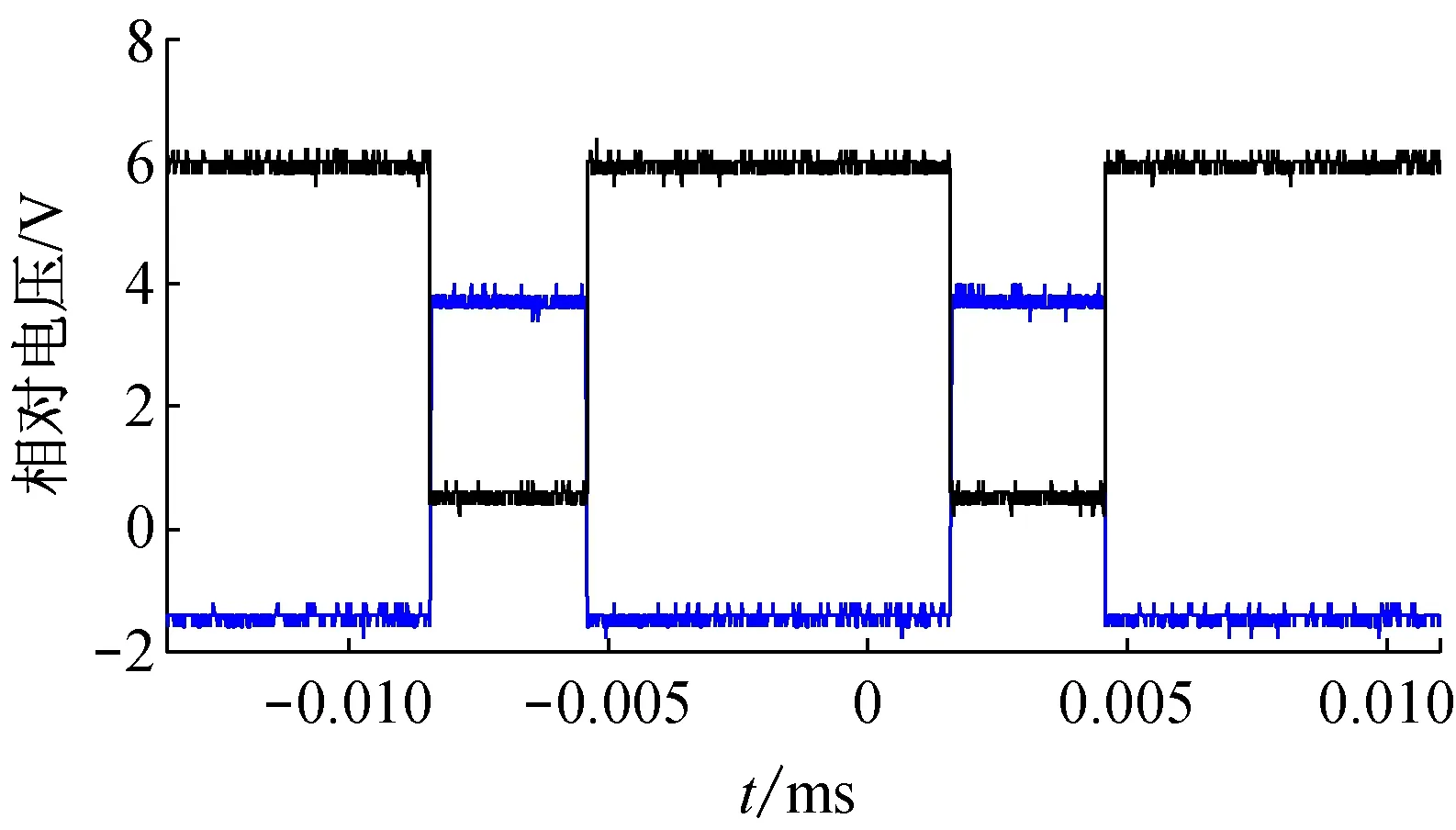
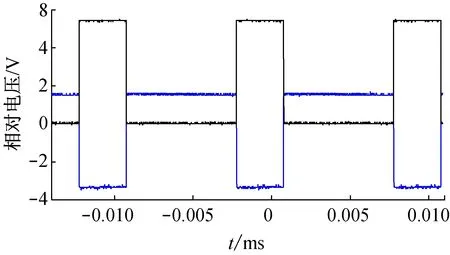
图9 dSPACE 输出PWM与经74HC14反相后的波形对比
4.2 信号采集滤波
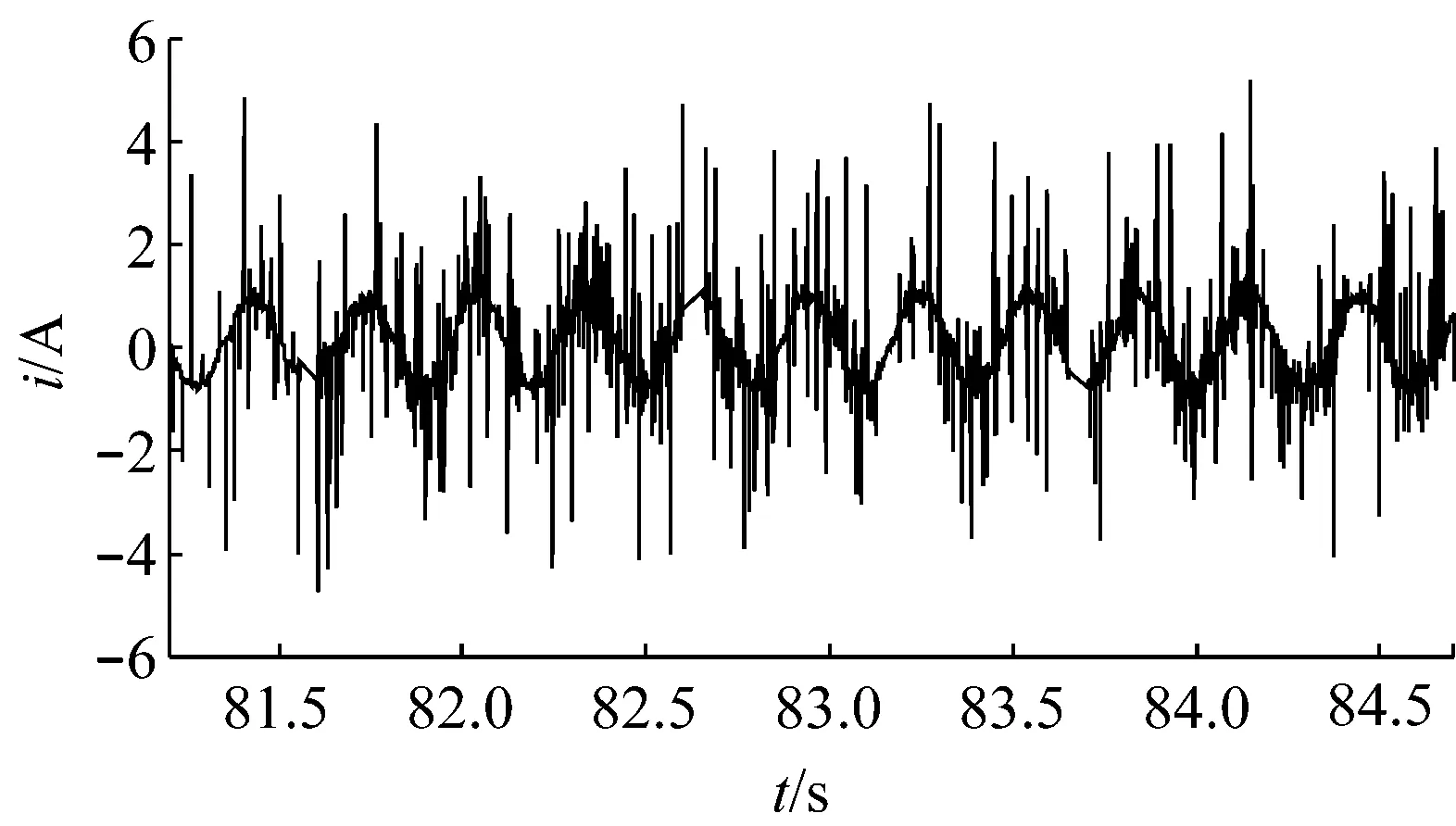
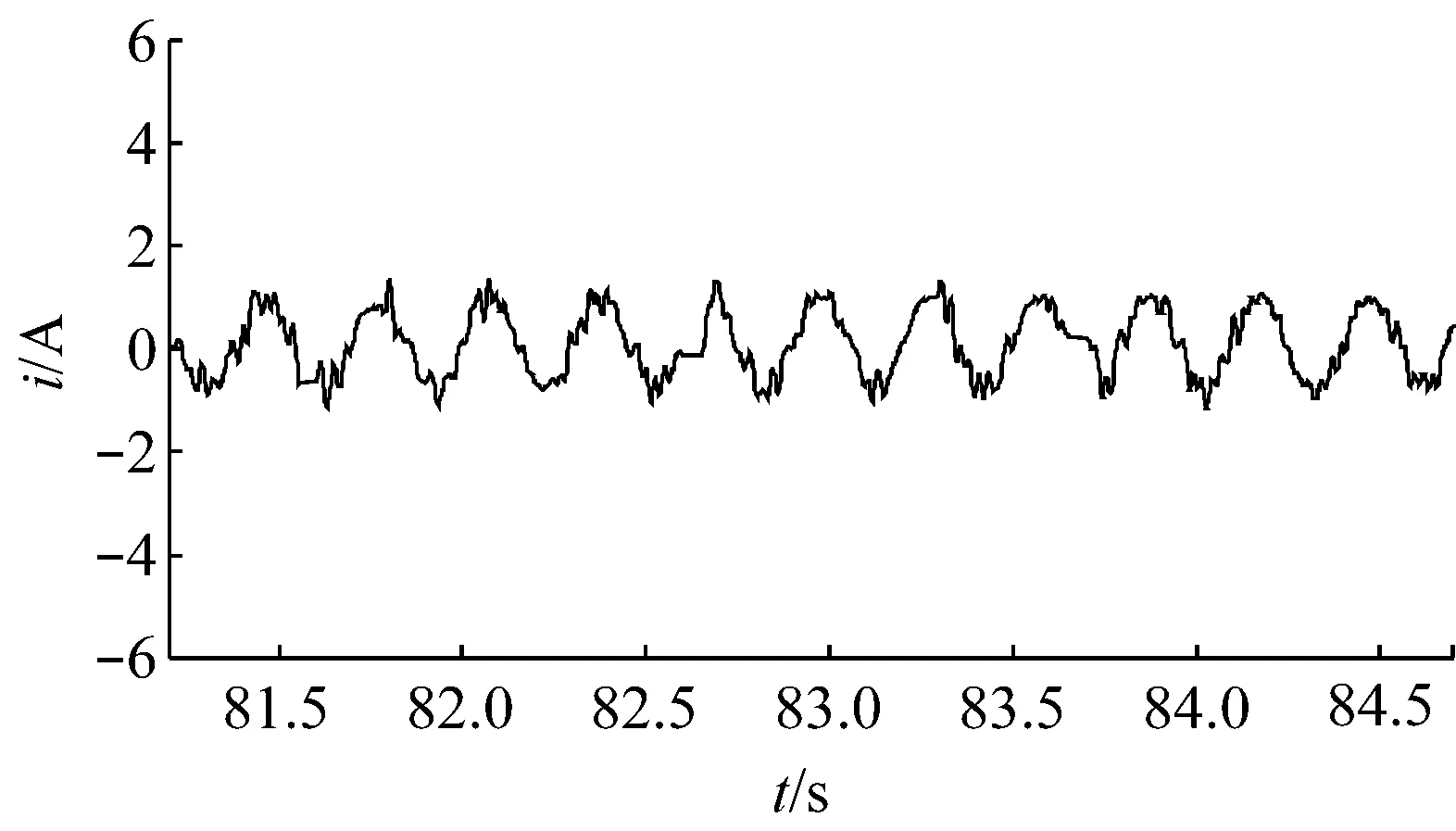
图10(a)是三相定子电流ia的波形曲线,可以看出,电流霍尔传感器的输出存在大量的干扰谐波分量,严重影响了矢量控制精度,必须加入滤波环节,但同时会带来延滞,为了平衡延滞作用,需要在电流给定环节中加入一个相同时间常数的给定滤波惯性环节[16]。 图10(b)是加入滤波环节之后,测得的定子电流ia的波形,可以看出电流波形得到修正,滤波效果明显。
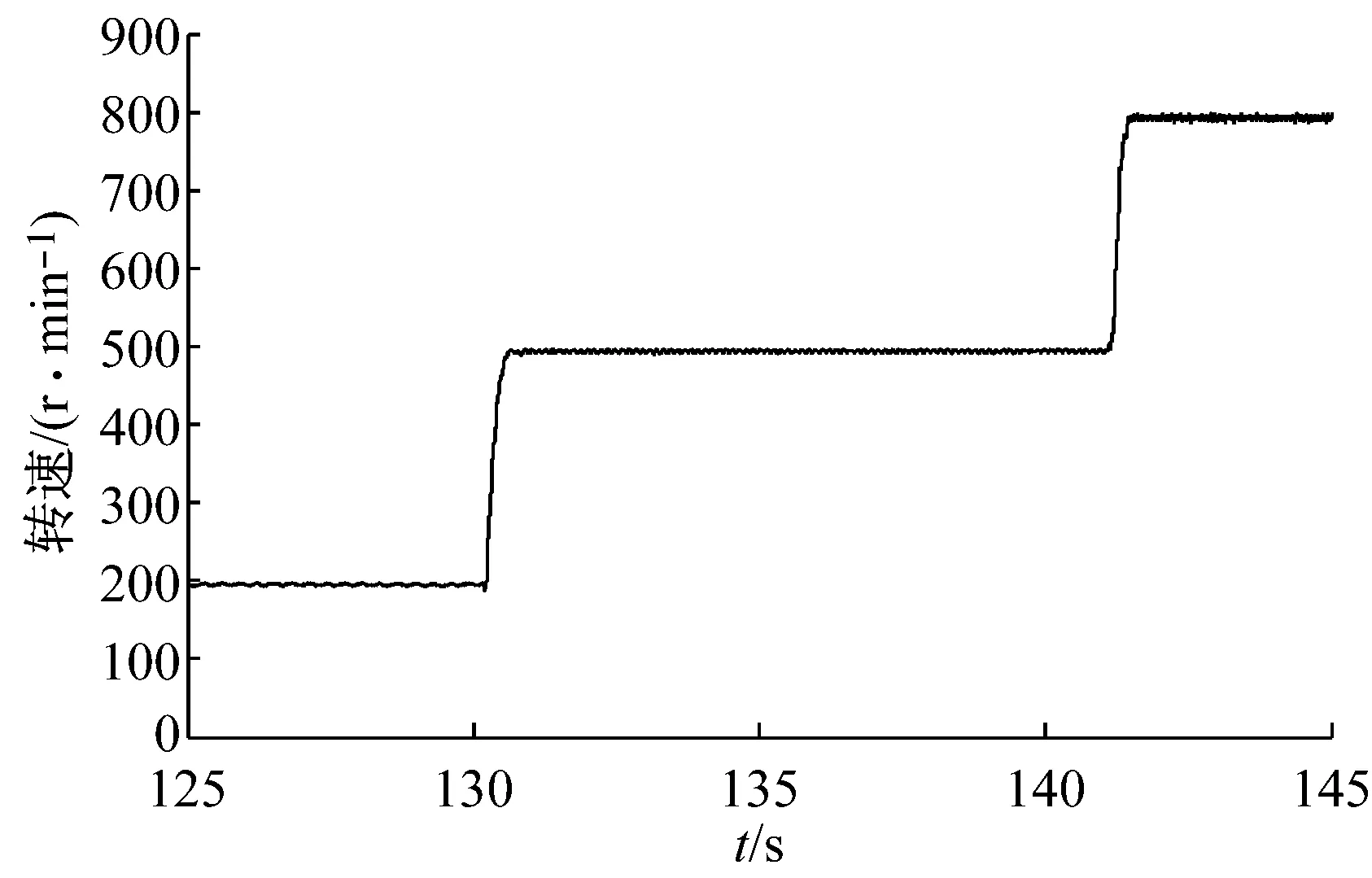
4.3 矢量控制转速实验
从图11电机转速响应曲线可知,矢量控制可以控制电机快速无超调地至给定转速,稳态精度高。
5 结 语
V模式开发使控制算法能在实时硬件上方便快速地进行修改和进行硬件在环测试,从而在设计初期就能发现存在的问题,整个开发过程基于同一平台、循环往复,大大缩短项目的开发周期,在复杂控制算法的实现上其优势更加明显,该开发模式可以广泛用于各行业控制器从设计仿真到具体实现的开发过程。
[1] 刘 杰, 翁公羽, 周宇博. 基于模型的设计-MCU篇[M].北京:北京航空航天大学出版社,2011.
[2] 杨向忠,安锦文,崔文革. 嵌入式自动代码生成技术应用研究[J]. 弹箭与制导学报, 2008, 28(3): 250-257.
YANG Xiang-zhong, AN Jin-wen, CUI Wen-ge. The Research on Application of Embedded Auto Code Generation[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2008,28(3): 250-257.
[3] 丁荣军. 快速控制原型技术的发展现状[J].机车电传动, 2009(4):1-3.
DING Rong-jun. The Development Status of Fast Control Prototype[J].Electric Drive Locomotives, 2009(4):1-3.
[4] 刘锦波, 张承慧.电机与拖动[M].北京:清华大学出版社, 2006.
[5] 张承慧,崔纳新,李珂.交流电机变频调速及其应用[M].北京:机械工业出版社,2008.
[6] dSPACE.MABXII ACMotor UserGuide[Z]. dSPACE Inc., 2012.
[7] 李晓宁,李逢春. 基于dSPACE的永磁同步电机控制半实物仿真实验设计[J].实验室研究与探索,2011,30(9):12-14.
LI Xiao-ning, LI Feng-chun. Design of dSPACE-Based Half-Practicality Simulation System for PMSM Control Experiment[J]. Research and Exploration in Laboratory, 2011,30(9):12-14.
[8] 彭红涛. 基于dSPACE的电动汽车异步电机驱动系统的研究[D]. 武汉:武汉理工大学,2006.
[9] dSPACE. MicroAutoBox RTI Reference Release 7.2[Z]. dSPACE Inc.,2011.
[10] 樊晓丹,孙应飞,李衍达.一种基于RTW的实时控制系统快速开发方法[J].清华大学学报(自然科学版),2003,43(7): 895-898.
FAN Xiao-dan, SUN Ying-fei, LI Yan-da. Rapid development of real-time control systems in C++ based on RTW[J].Journal of Tsinghua Univ(Sci & Tech), 2003,43(7):895-898.
[11] 宋 科,刘卫国,骆光照.控制系统硬件在回路实时仿真实验平台的dSPACE实现[J].微特电机,2008(4):28-31.
SONG Ke, LIU Wei-guo, LUO Guang-zhao.dSPACE Implementation of Hardware in Loop Real-Time Simulation Laboration Plants for Motion Control[J]. Small & Special Electrical Machines, 2008(4):28-31.
[12] Sung Chul Oh. Evaluation of Motor Characteristics for Hybrid Electric Vehicles Using the Hardware-in-the-Loop Concept[J].IEEE Transactions on Vehicular Technology, 2005,54(3): 817-824.
[13] I.R. Kendall, R.P. Jones. An investigation into the use of hardware-in-the-loop simulation testing for automotive electronic control systems[J].Control Engineering Practice. 1999(7):1343-1356.
[14] LU Bin, WU Xin, Hernan Figueroa, Antonello Monti. A Low-Cost Real-Time Hardware-in-the-Loop Testing Approach of Power Electronics Controls[J].IEEE Transactions on Industrial Electronics, 2007,54(2): 919-931.
[15] dSPACE.ControlDesk Next Generation[Z]. dSPACE Inc., 2011.
[16] 曾孟雄,方春娇.基于PMSM的交流伺服系统电流环设计及整定[J].组合机床与自动化加工技术,2009(7):44-46.
ZENG Meng-xiong, FANG Chun-jiao.Designing and Tuning Current Loop on AC Servo System Based on PMSM[J]. Modular Machine Tool & Automatic Manufacturing Technique,2009(7):44-46.
猜你喜欢
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
仪器仪表用户(2020年5期)2020-05-04 12:36:18
动漫星空(2018年11期)2018-10-26 02:24:02
动漫星空(2018年2期)2018-10-26 02:11:00
动漫星空(2018年9期)2018-10-26 01:16:48
动漫星空(2018年5期)2018-10-26 01:15:02
电子世界(2016年15期)2016-08-29 02:14:28
电子科技(2015年2期)2015-12-20 01:09:20
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10