
白车身高速输送中的定位研究
2014-02-09 02:38:15贺毅广州明珞汽车装备有限公司广东广州510530
自动化博览 2014年3期
贺毅(广州明珞汽车装备有限公司,广东 广州 510530)
白车身高速输送中的定位研究
贺毅(广州明珞汽车装备有限公司,广东 广州 510530)
开发了一种基于变频器加普通三相异步电机的全闭环快速精确定位控制系统。使得标准白车身(带夹具重1.5t内)在标准工位(6M)之间移动时间降低到5s以内,精度保证在±0.25mm。在柔性生产线中大大提高生产效率,降低了设备制造和维护成本。
变频器;全闭环;白车身;高速定位
1 项目意义
定位是工控行业中使用频繁,最多的控制方法,传统的定位控制在精度较高情况下,普遍考虑采用伺服定位方式[1],这种控制方式优点在于:在机械可靠连接的情况下定位精度非常高,控制方法成熟且稳定可靠[2]。但其存在较为致命的缺点:一是在运动部件质量不能太大;二是其采用的是半闭环控制结构,当机械传输出现误差时,定位就会出现偏差;三是当功率增大时,成本造价相当高。本研究正是针对以上三个缺陷而设计的闭环定位控制系统。它具有如下优点:
(1)可以针对大质量、大体积运动部件进行精确的定位控制;
(2)采用全闭环控制结构,可以采用摩擦式机械传输机构,这样,主从传输机构可以分离,达到远距离接力传输的特殊效果;
(3)控制软件标准化程度高,在设置相当接口的情况下,软件可以做成标准化程序供PLC单元调用;
(4)性价比高,相比伺服系统,在大功率传输上有非常明显的价格优势;
(5)本研究是基于Emerson CT SP系列变频器的智能定位控制系统。
2 软件结构
本软件采用嵌套模块化的结构设计(如图1所示),即标准功能模块化设计后,软件通过调用标准功能模块实现特定控制目标。
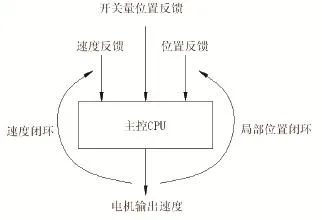
图1 控制结构图
本软件结构包含以下几个主要部分,如图2所示。
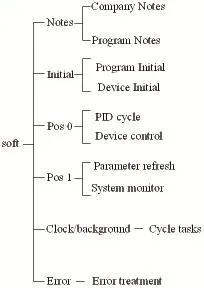
图2 软件结构图
(1)Notes
本目录下主要包含关于设计的说明和软件版本说明,以及本程序的设计范围和适应范围,修改本程序需要注意的事项等。本项作为程序的一部分,在程序运行中没有实际参与控制,只作为注释块存储于变频器ROM寄存器中。
(2)Initial
本目录下主要包含变频器的初始参数赋值及初始变量的赋值,当变频器上电后,本程序最先运行,确保后续程序变量及变频器初试状态的运行,同时本程序只在变频器启动初期运行一次,变频器启动正常后将不再运行此程序,同样,本程序作为整体程序的一部分存储于变频器的ROM寄存器中。
(3) Pos 0
本目录下主要包含程序的核心部分:定位驱动及位置闭环运动过程。由于本目录程序具有最高的扫描优先级,每个扫描周期,这部分程序将最先运行,同时,整个程序的扫描周期是笔者在参数中定义的,只有Pos0完成扫描后,CPU才会去扫描其他程序并输出结果,刷新I/O等,所以此部分程序要求精简短小,保证扫描的快速性及整体扫描周期的持续性。
(4)Pos 1
本目录下程序包含一些重要变量值获取和I/O端口外部值的获取等,与Pos0一样,此部分程序具有较高的扫描优先级,每个扫描周期,CPU在扫描完Pos0后,紧接着刷新I/O及各个端口数据,然后就是运行本部分程序。只有在本部分程序运行完毕后,CPU才会去运行其他逻辑运算程序,因此,本部分程序也是要求精简短小,保证CPU能快速完成扫描,确保系统协调稳定。
(5)Clock
本目录下程序包含整个程序的大部分代码,此部分代码在扫描周期允许情况下,每个扫描周期均会扫描执行并更新变量,但是此部分程序优先级较低,只有在Pos0,Pos1完成扫描后CPU才能扫描此部分程序。
(6)Error
本目录下程序为故障处理程序,CPU正常运行期间,此部分程序没有运行,当CPU产生报警后,此部分程序触发,以此执行各条命令。
3 软件功能【3】
高速台车是汽车生产设备中较为先进的关键设备,近年来由于生产节拍的不断提高,对输送设备的响应要求也越来越高。在白车身生产过程中,由于质量大、体积大,如何快速精确输送一直是困扰设备制造商的一大难题。本软件开发了一种控制程序,采用智能变频器和光栅编码尺构建闭环控制的模式,成功解决了大质量、大体积工件的快速精确输送,为白车身生产提供了一种较为有效的输送方法。图3为软件功能图。

图3 软件功能图
3.1 速度闭环快速启动功能
本系统选用的变频器在重载模式下比电机大一个等级,这样可以保证在电机加减速过程中具有良好的动态性能,电机响应速度快(如图4所示)。
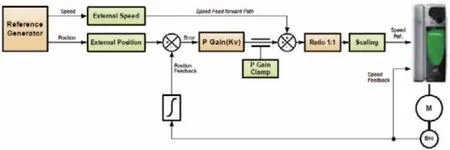
图4 速度闭环示意图
3.2 自动进入位置闭环
本系统运动前期是速度闭环加上位置开环运转,这样可以保证运行过程中的运动部件具有良好的移动性能,也就是理论上可以从无限远处移动到本位置,这种移动控制方式是伺服不可能做到的。
3.3 短距离快速停止与PID参数自动适用
3.3.1 数字PID控制的差分方程

式中:

称为比例项

称为积分项
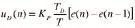
称为微分项
位置型PID算法算式:

当系统进入闭环后,位置闭环系统实时监视当前位置与目标位置的距离差值,当达到一定范围内后,迅速启动停止逻辑,使之在短距离范围内快速停止,同时,调整PID参数,降低系统的刚性,使之稳定。(如图5所示)
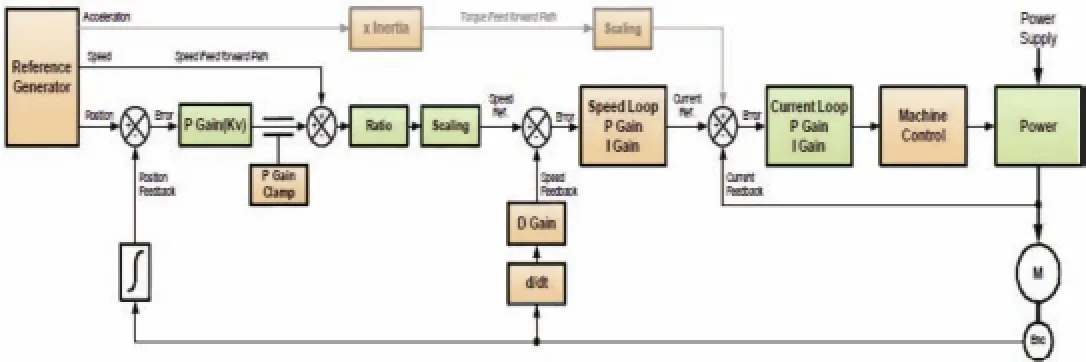
图5 PID模式运行示意图
4 结语
当今白车身生产线对柔性化生产要求越来越高,节拍要求越来越高,导致对定位输送的速度和精度要求日益提高,传统的伺服传动在某些领域显得苍白无力。同时,伺服传动亦有其本身不可逾越的技术瓶颈。开发出具有伺服同等定位精度,能实现快速定位的控制系统具有特殊重要的意义。在未来的白车身输送系统以及其他应用领域必将得到广泛应用。
[1] 滕福林, 胡育文, 刘洋, 储剑波. 位置/电流两环结构位置伺服系统的跟随性能[J]. 电工技术学报, 2009 (10) : 2-3.
[2] 贺毅. 基于PLC的汽车零部件高速输送系统设计[J]. 可编程控制器与工厂自动化, 2011 (11) : 1-4.
[3] 统一交流驱动器操作手册 [Z]. 爱默生 (中国) . 1-340.
The Location Research of White Body High-Speed Transportation
We developed a high-speed closed loop location system based on inverter and common asynchronous motor. It makes movement time of standard white body (1.5tons) between standard work unit(6 metres) less than 5 seconds, precision less than ±0.25millimetres. Productivity has been improved greatly in fexible production line, and the equipment manufacture and maintenance cost are also reduced.
Inverter; Closed loop; Body-in-white; High-speed position
科技型中小企业技术创新基金项目支持
贺毅(1980-),男,湖南益阳人,硕士,中级职称,现就职于广州明珞汽车装备有限公司,主要研究方向为自动化控制与系统集成。
B
1003-0492(2014)03-0080-03
TP273
基金名称:应用于汽车焊装工艺的高速柔性输送系统(立项代码:12C26214405212)
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:30:50
防爆电机(2020年3期)2020-11-06 09:07:42
测控技术(2018年5期)2018-12-09 09:04:50
电子制作(2017年7期)2017-06-05 09:36:13
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
汽车维修与保养(2015年7期)2015-04-17 02:12:44
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12
汽车维护与修理(2015年6期)2015-02-28 12:17:31
