
基于临近空间飞行器的区域导航系统关键技术分析*
2014-01-26 10:16杨峻巍
电讯技术 2014年4期
杨峻巍
(中国西南电子技术研究所,成都 610036)
基于临近空间飞行器的区域导航系统关键技术分析*
杨峻巍**
(中国西南电子技术研究所,成都 610036)
在战时环境下,GPS、“北斗”等全球卫星导航定位系统将受到敌方强力的电子干扰,从而导致其无法实现精确定位,为此提出了一种全新的无线电导航系统,即基于临近空间飞行器的区域导航定位系统。首先简要阐述了临近空间飞行器的特点,在此基础上建立了基于临近空间飞行器的区域导航系统的体系结构;其次从技术层面对其关键技术进行了详细分析,并提出了一些解决措施;最后对该区域导航系统提出几点展望,并指明了当前亟待解决的关键技术,对我国未来建立基于临近空间飞行器的区域导航系统具有一定的理论参考价值。
临近空间飞行器;区域导航系统;几何精度因子;优化重构
1 引言
随着航空、航天技术的快速发展,空天一体化作战以其得天独厚的信息优势、实时高效的指挥决策优势和精确打击的火力优势受到了各军事大国的高度重视。与此同时,临近空间作为尚未被人类充分开发和利用的空、天过渡区也同样成为了世界各国的研究热点[1-2]。
由于临近空间独特的空间环境,使得临近空间飞行器在情报、监视、侦察、通信中继、预警、导航以及电子战等方面具有比航空平台和空间平台更大的优势[3-6]。临近空间飞行器既可以高速飞行亦可以定点悬停,相比于航空平台,其具有更长的滞空时间(数日、数月甚至数年)、更强的机动能力。相比于航天平台,其具有较高的地面分辨率和成像灵敏度,同时具有安全性高、发射成本低、部署灵活以及生存能力强等优点[7-8]。
在战时环境下,由于敌方对GPS、“北斗”等全球导航定位系统实施的强有力电子干扰,将可能使得己方陆、海、空等作战平台无法实现精确定位。针对上述问题,本文提出了基于临近空间飞行器的区域导航系统,并对临近空间飞行器区域导航系统的关键技术及发展前景进行了详细论述。
2 临近空间飞行器区域导航系统体系构想
2.1 临近空间飞行器特点分析
所谓临近空间是指距海平面20~100 km的空间区域,包括大气平流层、中间层及部分电离层,由于其介于传统的空天之间,因此也被称为“空天过渡区”。临近空间飞行器[2],顾名思义是指飞行于临近空间区域的飞行器,由于其所处空间范围的特殊性,使其具有航空飞行器与航天飞行器无法比拟的诸多优势,主要表现为如下几点。
(1)生存能力强
目前世界上绝大多数防空导弹和作战飞机都无法达到这一高度,而所谓的外太空武器尚处于试验阶段不具有实战能力,因此临近空间便成为了相对安全的“真空”环境。此外,大多数临近空间飞行器外形比较光滑,雷达和红外特征很不明显,而可见光特征在天空的背景中基本被淹没,因此传统的跟踪和瞄准方法对其无能为力。
(2)滞空时间长
相比于传统的飞机,临近空间飞行器具有较长的滞空时间。传统飞机的滞空时间以小时为单位,而临近空间飞行器的滞空时间则以天为单位,甚至以月为单位。大多数临近空间飞行器可以长时间漂浮在空中,且所需能耗较低,其典型代表为平流层飞艇及高空气球等[9]。
(3)响应速度快
与航天飞行器相比,临近空间飞行器对发射环境的要求较低,且发射设备及发射程序较为简单,可随时应急升空,快速部署,非常适合于战时环境下的作战需要。
(4)覆盖范围广
相比于传统飞机,其飞行高度较高,因此其覆盖范围也相应地增大。
(5)效费比高
相对于航天器,其研发周期短,成本低廉。
基于临近空间飞行器的上述优点,临近空间飞行器在军事作战应用中得到了快速发展,如基于临近空间飞行器的侦察监视平台、通信中继平台、电子对抗平台、运输补给平台、演示验证平台以及空间武器平台等。
2.2 临近空间飞行器区域导航系统体系结构
鉴于临近空间飞行器所具有的得天独厚的优势,为了满足战时应急导航定位需求,本文提出了基于临近空间飞行器的区域导航系统,其体系构架如图1所示。
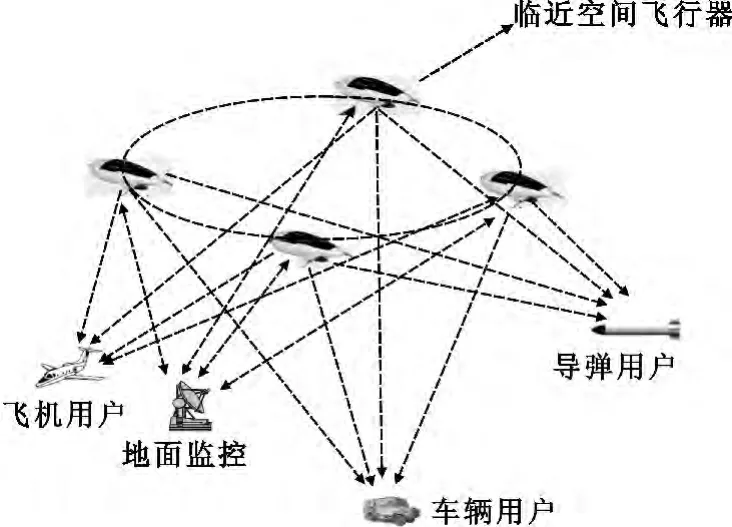
图1 基于临近空间飞行器的区域导航系统结构体系Fig.1 The architecture of regional navigation system based on near space vehicle
基于临近空间飞行器的区域导航系统由地面监控部分、临近空间飞行器导航平台、用户接收机三部分组成,其工作原理可简单描述如下:首先,临近空间飞行器向地面发射信号;其次,地面监控部分通过接收、测量各临近空间飞行器发射的信号,进而确定临近空间飞行器空间精确位置,并将其位置信息发送到各临近空间飞行器,临近空间飞行器在其发射的导航信号上转播其位置信息;最后,用户接收机通过接收、测量各临近空间飞行器的导航信号,并从中获取临近空间飞行器的位置信息,进而确定用户接收机自身的空间位置。
3 关键技术分析
尽管基于临近空间飞行器的区域导航系统在未来作战中具有重要的军事意义,但是仍有许多关键技术亟待解决,其中包括临近空间飞行器的几何布局、临近空间飞行器自身定位技术、临近空间飞行器“导航星座”优化重构技术等[10-16]。
3.1 几何布局
3.1.1 覆盖范围
单个临近空间飞行器对地球表面的覆盖范围如图2所示,其中P点代表临近空间飞行器的空间位置,h表示临近空间飞行器相对于地面的高度,α表示临近空间飞行器对地球的最大覆盖范围,R为地球半径。
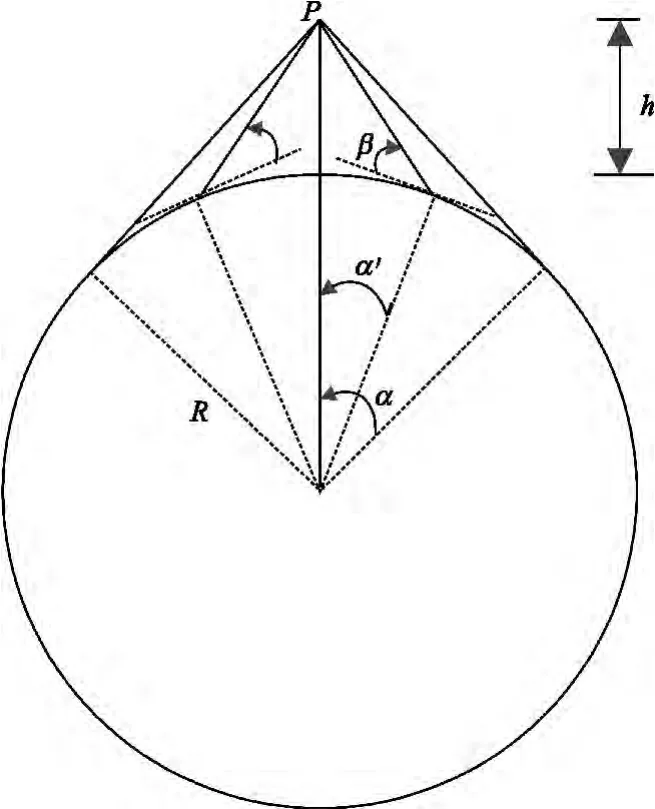
图2 临近空间飞行器对地球表面的覆盖图Fig.2 The coverage area of earth surface by near space vehicle
由图2的几何关系可得
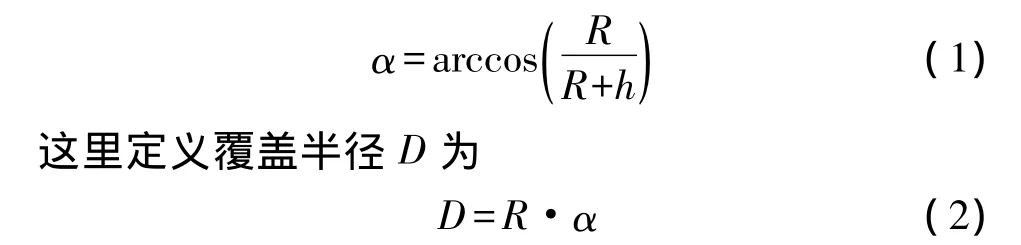
相关文献表明[2],在临近空间环境中,20~30 km的空间范围内,其气象条件较为稳定,风切变较小,因此这一区域常常被作为临近空间飞行器的“黄金区域”。当然对于要求动态变化较小的临近空间飞行器导航平台更是如此,因此这里重点针对这一区域展开分析。根据式(1)和式(2)可得,在不同高度情况下临近空间飞行器的覆盖半径如图3及表1所示。图3表明,随着飞行器的高度不断增大,覆盖范围也在不断扩大。表1进一步表明,在“黄金区域”,临近空间飞行器的可覆盖的最大半径约为500~600 km,该覆盖半径已可以很好地满足局部战场所需要的覆盖半径。
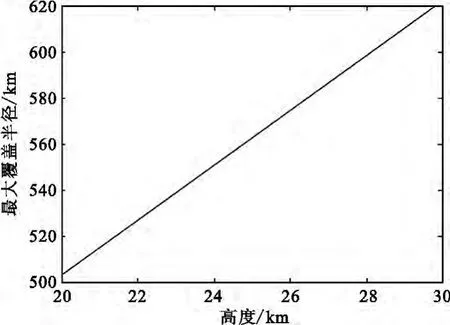
图3 不同高度情况下临近空间飞行器的覆盖半径Fig.5 The coverage radius of near space vehicle under different altitudes
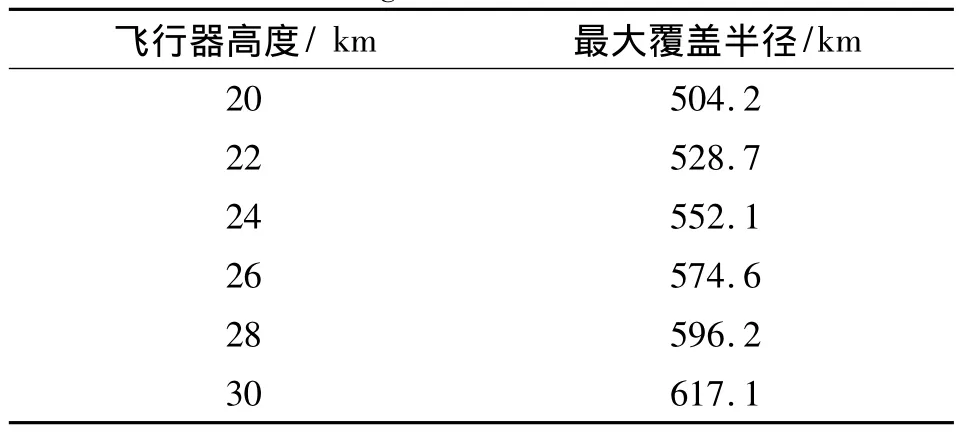
表1 不同高度情况下的覆盖半径Table 1 The coverage radiusunder different altitudes
在区域导航系统中,为了获得较好的观测量及几何精度因子,往往要设定一门限值即最小仰角β来从“可视卫星”中选择“可用卫星”,则由图2及余弦定理可得

进一步可得,在仰角为β时,临近空间飞行器所能覆盖的最大半径为

当h=20 km时,不同仰角下飞行器的覆盖半径如图4所示。
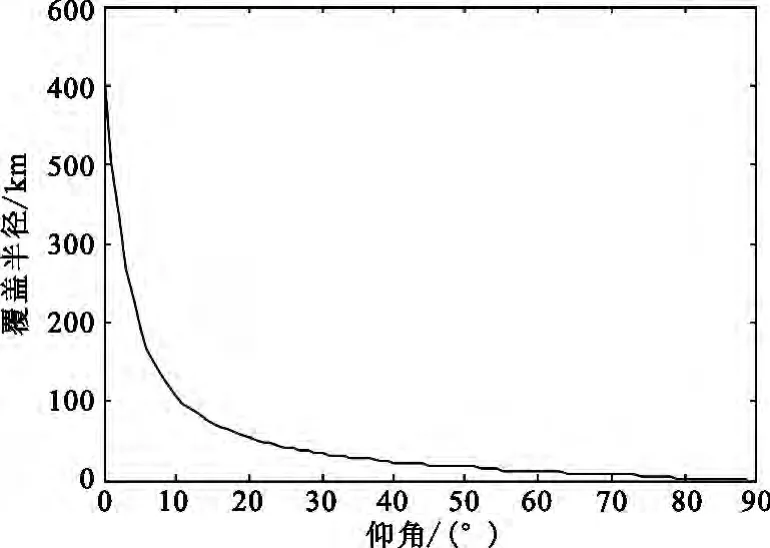
图4 当h=20 km时不同仰角情况下飞行器的覆盖半径Fig.5 The coverage radius of thenear space vehicle under different elevation when h=20 km
根据全球卫星导航系统选星准则及工程经验[17-19],这里选择最小仰角 β=15°来进行覆盖范围分析。表2给出了不同高度情况下飞行器的覆盖半径。
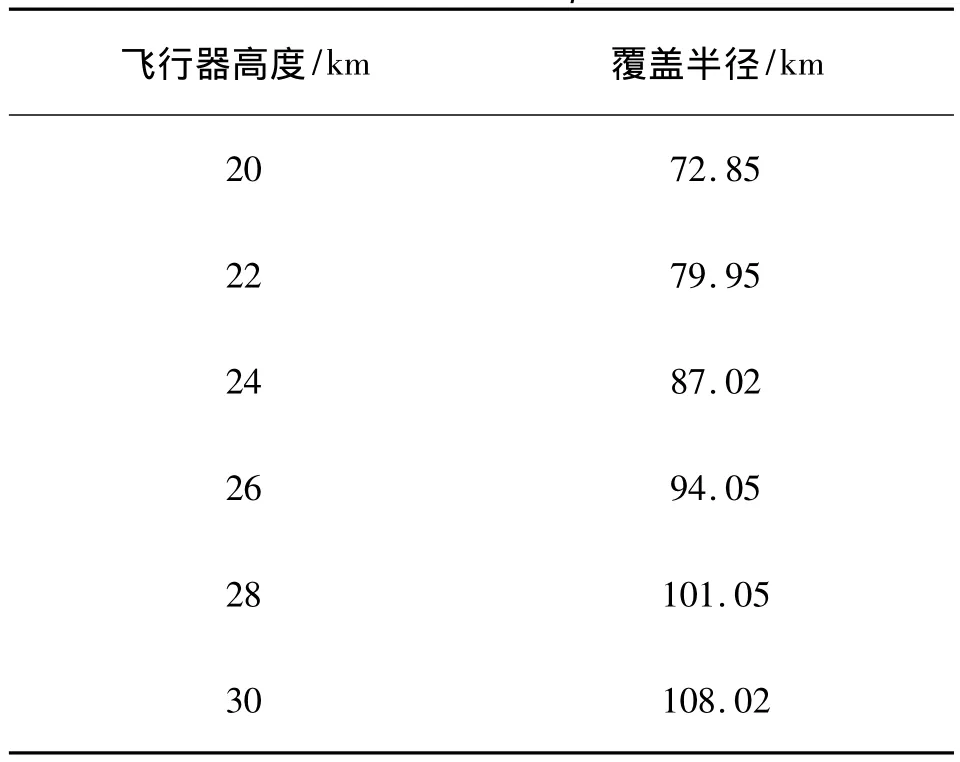
表2 当仰角β=15°时不同高度情况下飞行器的覆盖半径Table 2 The coverage radius under different altitudes when the elevation β=15°
3.1.2 GDOP 值
与GPS导航系统类似,基于临近空间飞行器的区域导航系统的定位精度主要取决于以下两个方面:测量误差和“卫星”的几何分布[5],即

其中,G通常称为几何矩阵,仅与各颗“卫星”相对于用户的几何位置有关。
由式(5)可以看出,在相同的测量误差条件下,GDOP值越小,则测量误差被放大成定位误差的程度就越低。
设接收机到各“卫星”的单位矢量分别为OA、OB、OC及OD,如图5所示,其中点A、B、C及D都在以用户O点为中心的单位球面上。
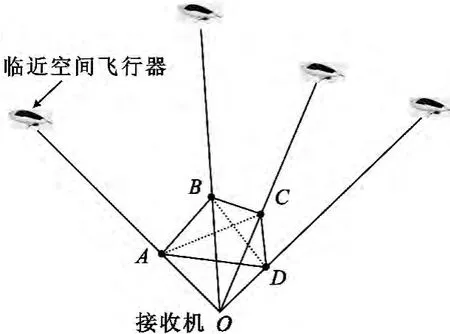
图5 接收机与各临近空间飞行器的几何构型Fig.5 The geometry structure between the receiver and near space vehicle
设由点A、B、C及 D组成的四面体ABCD的体积为V,则由式(7)及图5可得GDOP值与V的关系如下所示:

由式(8)可得,GDOP值与四面体的体积V成反比,即四面体体积越大,则GDOP值越小。因此,我们可以通过求取任意4颗卫星所组成的上述四面体的体积作为选星标准,选择四面体体积最小的4颗卫星作为导航定位的最佳“星座”。
3.2 临近空间飞行器的自身定位技术
与GPS、“北斗”等卫星导航系统一样,基于临近空间飞行器的区域导航定位系统要实现精确定位,必须要满足两个必备条件:一是要知道各临近空间飞行器在空间的准确位置,二是要测量目标与这些临近空间飞行器精确距离。为了实现区域导航,往往采用相对固定的临近空间飞行器作为“导航星座”平台[6],如平流层飞艇等。针对其“相对静止”的特点,可以采用以下几种方法实现。
(1)导航卫星定位法
导航卫星定位法,即利用全球卫星导航系统实现精确定位,尽管该方法可以取得较高的“定轨”精度,但是目前最为成熟的全球定位系统GPS受控于美国,在战时可能无法使用,因此需配备其他备用定位方法作为有效补充。其定位原理如图6所示。
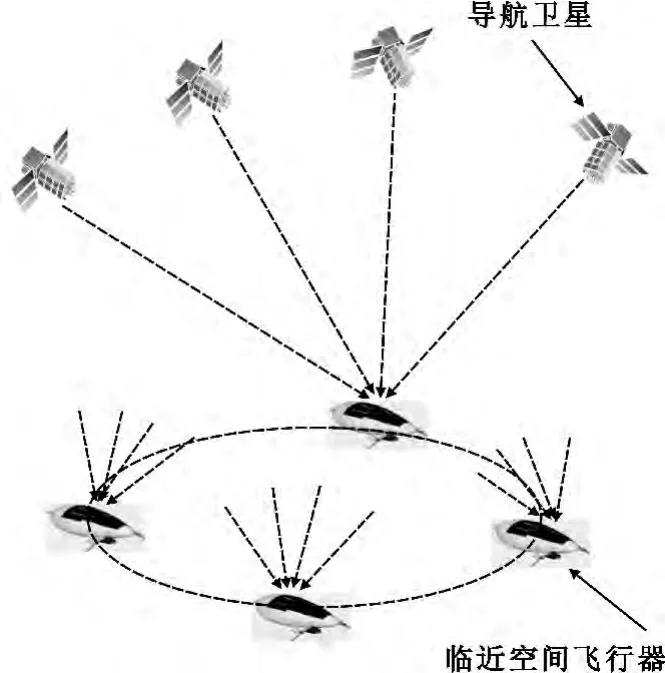
图6 利用卫星导航系统对临近空间飞行器进行精密定轨Fig.6 The orbit determination of the near space vehicle by GNSS
(2)基于地基伪卫星的“倒定位”法
在此所谓“倒定位”法[20],指的是利用多个地基伪卫星通过精确测量各伪卫星到临近空间飞行器的精确距离来实现对临近空间飞行器的精确定位与定轨,其基本原理如图7所示。

图7 利用地基伪卫星对临近空间飞行器定位(即“倒定位”法)Fig.7 The near space vehicle is located by the ground-based pseudolites(namely,“inverse location”)
根据有源和无源,“倒定位”法可分为主动定轨模式和被动定轨模式,其中主动模式又可分为双程测距和单程测距两种工作模式。
所谓被动定轨模式,指的是地基伪卫星发射带有自身精确位置导航信号,临近空间飞行器被动接收各伪卫星发射的导航信号,并通过一定的算法实现自主定位,如图8(a)所示。
所谓双程测距定轨模式,指的是临近空间飞行器向地面发射测距信号,地基伪卫星接收并转发该测距信号及伪卫星的精确位置,然后在临近空间飞行器上完成自身的高精度定位,如图8(b)所示。
所谓单程测距定轨模式,指的是临近空间飞行器向地基卫星发射导航信号,地基伪卫星接收导航信号并测量出各自与临近空间飞行器的伪距,然后将其自身精确位置及伪距发送到主站,主站精确解算出临近空间飞行器的位置,并通过发射站将其返回临近空间飞行器上,如图8(c)所示。

图8 3种常用的“倒定位”方法Fig.8 Three“reverse location”methods in common use
由于被动定轨模式只接收信号,并不需要发射信号,因此其隐蔽性好,特别适用于战时应用,但是该模式要实现精密定轨需各地基伪卫星保持高精度的时间同步,为此可通过双向时间比对技术来实现;双程测距定轨模式不需要各地基伪卫星严格的时间同步,但是由于其定轨解算是在临近空间飞行器平台上进行,因此势必会增加临近空间飞行器导航平台的有效载荷;单程测距定轨模式与被动式定轨模式相同,需要各地基伪卫星之间保持高精度的时间同步,同时由于定轨解算是在地面站完成,因此需要一额外的发射站将其定轨结果回传到临近空间飞行器上。尽管该模式增加了地面设备的复杂性,但是同时也节省了临近空间飞行器的宝贵的有效载荷。
由以上分析可知,导航卫星定位法尽管结构简单且易于实现,但是在战时会受制于人,而基于地基伪卫星的“倒定位”法尽管需要前期的一些投入,但是其定位精度较高,且不易受制于人,因此作为战时应用的临近空间飞行器区域导航更适合采用“倒定位”法来实现精密“定轨”。
3.3 “星座”的优化重构技术
在基于临近空间飞行器的区域导航系统中,尽管由4颗伪卫星合理布局即可实现精确的导航定位,但是在战时环境下,往往会发射更多的临近空间飞行器导航平台,这样不仅可以提高区域导航系统的覆盖范围,而且可以提高导航系统的鲁棒性和定位精度。
在构建临近空间飞行器区域导航系统时,从费用的角度,我们往往首先部署少量的临近空间飞行器(最少4艘)作为一简单的“导航星座”来满足最基本的导航定位。为了进一步改善系统的定位精度或工作区域,则需发射更多的临近空间飞行器,当新的临近空间飞行器被加入已有的“导航星座”时,则需对星座进行重新构造,从而才能达到系统的最优化。
此外,当某一临近空间飞行器被敌方毁伤或失效时,则原有的“导航星座”也需要对星座内的其余临近空间飞行器进行优化重构,进而实现新系统的最优化。
4 展望
基于临近空间飞行器的区域导航系统的定位精度受诸多因素的影响,本文从以下几个方面对其提出几点展望。
(1)本文仅从单个临近空间飞行器的覆盖范围进行分析,而区域导航系统实现定位时,需要对整个“星座”的覆盖范围进行讨论,即区域导航系统能够实现有效定位的覆盖范围。
(2)本文虽然介绍了几种临近空间飞行器“定轨”方法,但是这些方法需通过“导航星座”与地面或导航卫星进行信息交换进而实现精密“定轨”,当链路出现故障或无法工作时,整个区域导航系统将很快出现瘫痪。为了满足应急情况下,临近空间飞行器的精密“定轨”,可以从以下两个方面进行研究:一是通过建立临近空间飞行器间的通信链路实现“导航星座”的自主定轨;二是采用其他自主定位方法来实现“定轨”,如在临近空间飞行器上配备高精度的惯性导航系统等。
(3)几何布局的好坏对临近空间区域导航系统的定位效果具有较大的影响,当有新的“导航卫星”加入或原有的某一“导航卫星”出现故障时,其几何布局将发生变化。如何对“导航星座”进行优化重构是一非常重要的课题,如能否通过一些优化算法实现几何布局的自适应调节等。
5 结束语
本文首先分析了临近空间飞行器相对于航天飞行器及航空飞行器在建立区域导航系统的诸多优势,并在此基础上建立了基于临近空间飞行器的区域导航系统体系结构;然后对其关键技术进行了详细分析,提出了一些相应的解决措施,并对其今后的发展提出几点展望。希望上述研究能为未来战争中的区域导航定位提供新的发展思路。
[1]吴潜.临近空间飞行器武器装备建设发展思考[J].电讯技术,2009,49(8):98-102.
WU Qian.Development Thought for Weapon Equipment Construction Based on Near Space Aerocrafts[J].Telecommunication Engineering,2009,49(8):98-102.(in Chinese)
[2] 郭劲.临近空间飞行器军事应用价值分析[J].光机电信息,2010,27(8):22-27.
GUO Jin.Military Application Value of Near Space Vehicle[J].OME Information,2010,27(8):22-27.(in Chinese)
[3]呼玮,杨建军,何苹.基于临近空间飞艇定位的伪卫星布局研究[J].无线电工程,2009,39(10):24-27.
HU Wei,YANG Jian-jun,HE Ping.Study on Pesudolite Configuration Scheme Based on Near Space Airships[J].Radio Engineering,2009,39(10):24-27.(in Chinese)
[4]樊蓉,孟觉,邬蒙,等.临近空间伪卫星区域独立组网布局研究[J].测绘科学,2012,37(3):21-22.
FAN Rong,MENG Jue,WU Meng,et al.Distribution of the near-space pseudolite regional independent network[J].Science of Surveying and Mapping,2012,37(3):21-22.(in Chinese)
[5]柴霖,马卫华.“双星”增强系统近空间伪卫星布站设计[J].电讯技术,2007,47(1):64-67.
CHAI Lin,MA Wei-hua.Near Space Pseudolite Location for Double Satellites Augmentation System[J].Telecommunication Engineering,2007,47(1):64-67.(in Chinese)
[6]Cob H S.GPS Pseudolites:Theory,Design,and Apllications[D].California:Stanford University,1997.
[7]柴霖,杨斌.基于近空间伪卫星的“双星”增强系统[J].电讯技术,2006,46(4):96-100.
CHAI Lin,YANG Bin.Double Satellites Augmentation Positioning System Based on Near-Space Pseudolite[J].Telecommunication Engineering,2006,46(4):96-100.(in Chinese)
[8]杨龙,周建华,胡义勇.近空间区域导航增强系统信号设计与验证[J].遥测遥控,2009,30(4):32-39.
YANG Long,ZHOU Jian-hua,HU Yi-yong.Signal Design and Validation of the Near Space Local Area Augmentation System[J].Journal of Telemetry,Tracking and Command,2009,30(4):32-39.(in Chinese)
[9]Tsujii T,Rizos C,WANG J L,et al.A Navigation/Positioning Service Based on Pesudolites Installed on Strato-spheric Airships[C]//Proceedings of the 5th International Symposium on Satellite Navigation Techology&Applications.Canberra,Australia:IEEE,2001:123-127.
[10]LeMaste E A,Rock S.Mars exploration using self-calibrating pseudolite arrays[C]//Proceeding of 1999 ION GPS.Nashville,Tennessee:ION,1999:1549-1558.
[11]毛悦,孙付平.伪卫星关键技术分析[J].海洋测绘,2006,26(2):69-72.
MAO Yue,SUN Fu-ping.The Analysis of the Key Techniques of Pseudo Satelllte[J].Hydrographic Surveying and Charting,2006,26(2):69-72.(in Chinese)
[12]Kanli M O.Limitations of Pseudolite Systems Using Off-The-Shelf GPS Receivers[J].Journal of Global Positioning Systems,2004,3(1):154-166.
[13]Klein D,Parkinson B W.The use of pseudo-satelllites for improving GPS performance[J].Navigaiton,1984,31(2):303-315.
[14]Dai L,Wang J,Tsujii T,et al.Pseudolite applicaitons in deformation monitoring[J].GPS Solutions,2001,5(3):80-87.
[15]Tuohino J L,Farey M G,James R R.Miliary pesudolite flight test results[C]//Proceeding of 2000 ION GPS.Salt Lake City:ION,2000:2079-2088.
[16]LeMaster E A.Self-Calibratiing Pseedolte Arrays:Theory and Experiment[D].Stanford:Stanford University,2002.
[17]Stone J M,LeMaster E A,Powell J D,et al.GPS Pseudolite Transceivers and Their Applications[C]//Proceeding of the 1999 ION National Technical Meeting.San Diego,California:ION,1999:415-424.
[18]Parkinson B W,Fitzgibbon K T.Optimal location of pseudolites for differential GPS[J].Navigation,1986,33(4):259-283.
[19]Mistr P,Enge P.Global Positioning System:Signals,Measurements,and Performance[M].Lincoln,Massachusetts:Ganga-Jamuna Press,2001.
[20]Dai L W,Wang J L,Tsujii T,et al.Inverted pseudolite positioning and its aplplications[EB/OL].2001-04-04[2013-12-01].http://www.gmat.unsw.edu.cn/snap/publications/dai_etal2001h.pdf.
Analysis of Key Techniques of Regional Navigation System Based on Near Space Vehicle
YANG Jun-wei
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
In complex battlefield environment,the global satellite navigation system(GNSS),such as GPS and BD,will be jammed by electronic equipment so that it can not position accurately.Aiming at the problem,this paper proposes a novel radio navigation system,namely regional navigation system based on near space vehicle.First,the characteristic of near space vehicle is introduced,and the architecture of regional navigation system based on near space vehicle is established.Then,from the technical level,the key techniques are analyzed in detail,and some solutions are proposed.Finally,some prospects are presented,and the key techniques to be solved are discussed.The analysis above has an important reference value for establishing China's regional navigation system based on near space vehicle in the future.
near space vehicle;regional navigation system;geometric dilution of precision;optimum reconfiguration
TN96
A
1001-893X(2014)04-0385-07
10.3969/j.issn.1001-893x.2014.04.002
杨峻巍.基于临近空间飞行器的区域导航系统关键技术分析[J].电讯技术,2014,54(4):385-391.[YANG Jun-wei.Analysis of Key Techniques of Regional Navigation System Based on Near Space Vehicle[J].Telecommunication Engineering,2014,54(4):385-391.]
2013-12-09;
2014-03-03
date:2013-12-09;Revised date:2014-03-03
**
yangjunwei2899@163.com Corresponding author:yangjunwei2899@163.com

杨峻巍(1984—),男,山西繁峙人,2012年于哈尔滨工程大学获博士学位,现为工程师,主要从事卫星导航技术研究。
YANG Jun-wei was born in Fanshi,Shanxi Province,in 1984.He received the Ph.D.degree from Harbin Engineering University in2012.He is now an engineer.His research concerns satellite navigation technology.
Emai:yangjunwei2899@163.com
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
智富时代(2017年5期)2017-06-22
智富时代(2017年5期)2017-06-22
中国惯性技术学报(2017年1期)2017-06-09
健康女性(2017年3期)2017-04-27
儿童故事画报(2016年5期)2017-02-07
都市丽人(2016年12期)2016-12-14
百科探秘·航空航天(2016年9期)2016-12-01
都市丽人(2016年7期)2016-08-03
