基于单片机系统的无线探月机器车
2014-01-21 06:53杜欣宇
机电产品开发与创新 2014年5期
高 源,杜欣宇,赵 凯,梁 雪
(北京电子科技职业学院 自动化工程学院,北京)
0 引言
现在,随着科技的快速发展,国内外对小型智能系统的引用越来越广泛,种类也越来越多。本题目就是结合有关项目而确定的开发类课题,所设计的智能车能融单片机、RAM、多种传感器、直流电机,基于接口电路板,构建出融多种控制器于一体的控制系统;再通过软件编程与系统集成使得系统的各项功能得以实现和保障。
1 总体架构设计
AT89S52 单片机作为总的控制核心,利用传感器,在循线信号、检测障碍物信号等的输入作用下,控制电机采取相应的动作,从而调整小车做合适的选择。同时,将之转化为文字信息,通过LED 显示。该系统主要由循迹、避障、数码显示、电机驱动、电源、单片机控制等六大模块组成。如图1 所示。
2 硬件设计
2.1 控制器与任务模块
如图2 所示,在本设计中采用AT89S52 单片机作为控制核心,它是一种低功耗、高性价比的CMOS8 位微控制器。具有8K 可编程Flash 存储器,与MCS-51 单片机产品兼容,有32 个可编程I/O 接口,八个中断源,具有低功耗空闲和掉电模式,并且掉电后中断可唤醒,价格低廉,使用简便。
单片机需使用11.0592Mhz 的晶振。硬件连接: LCM数据口对应接P0 (BD0~BD7-P2.0~P2.7),LCM 控制RSP3.5,RW-P3.6,E-P3.7,I2C 总 线: SDA-P1.4,SCLP1.5。电机驱动器L298N 是ST 公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15 脚封装。它可以驱动一台两相步进电机或四项步进电机,也可以驱动两台直流电机。主要特点是: 工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
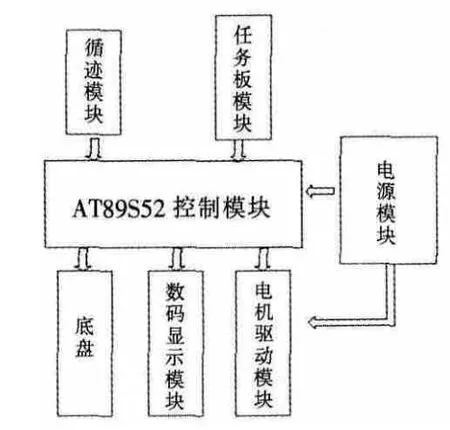
图1 总体架构设计图
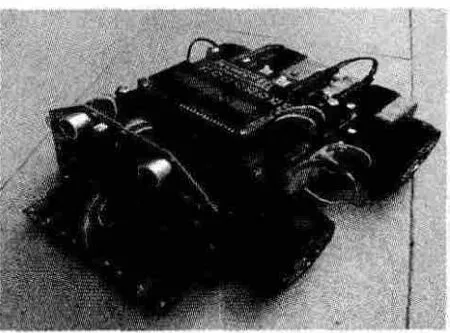
图2 无线探月机器车样车图
采用1 块充电锂电池为直流电机供电,将12V 电压降压、稳压后给单片机系统和其他芯片供电。充电电池具有较强的电流驱动能力以及稳定的电压输出性能。虽然充电电池的体积过于庞大,但由于我们的车体设计时留出了足够的空间,并且充电电池的价格比较低。故采用充电锂电池。底盘作用是支承、安装小车电机及其各部件、总成,成形汽车的整体造型,并接受发动机的动力,使汽车产生运动,保证正常运动。
任务板主要有两个功能,一个是超声波测距,另一个带I2C 总线的LM75 测温。AT89S52 单片机主要完成功能是超声波测距,并把数据挂到I2C 总线上,程序已下载到单片机中可以直接接上LCD1602 即可使用。测温部分采用ST 公司的STLM75 器件,它是一种含9 位ADC、温度分辨率高达0.5℃的数字温度传感器,测量范围-55℃~125℃。它提供两条线支持I2C 总线协议的接口来监测温度,并具备自校准功能。上位机以随时要求STLM75 去读取温度,当温度超过设定的温度时,芯片系统会自动输出一个超温报警信号,可用于上位机的监控操作。主机可以通过程序来控制温度警报器及温度,A0、A1、A3 三引脚可以设定地址,其自带的I2C 总线,挂在了同一总线上,可以通过ARM2440 开发板上的I2C功能接到任务板上I2C 接口上即可对任务板上超声波数据和温度数据读回。
2.2 功能模块
寻迹模块主要是由红外发生接收器探头来完成的,利用白色与黑色的反光特性的差异,最终达到寻迹的功能。其工作原理是: 红外发光二极管发射红外线,经过路面反射后,光敏管接收红外线。如果是白纸,红外线反射后则光敏电阻大幅降低,ST178 输出端产生一个低电平,经电压比较器LM324 比较后,将低电平信号送至单片机。若遇到黑线,红外线不能反射进入光敏管,从比较器输出高脚的输出电平信号组合来设定L293D 控制端的高低电平,实现使电机正反电平送入单片机。该模块有八个红外对管,通过调节对应对管的电位器来调节对管的灵敏度,通过不同的返回值来判断探月车的所在位置。
如果要直观了解探测车所获得的信息,数码显示模块的应用也是重要的一环。在此模块中,采用1602 液晶显示屏,1602 液晶屏是一种专门用来显示字母、数字、符号等的点阵型液晶模块。它由若干个5X7 或者5X11 等点阵字符位组成,每个点阵字符位都可以显示一个字符,每位之间有一个点距的间隔,每行之间也有间隔,起到了字符间距和行间距的作用,由于表达信息主要表达形式不需要图形等复杂形式,所以1602 可以很好地发挥在此处的用处。再有,1602LCD 是指显示的内容为16X2,即可以显示两行,每行16 个字符液晶模块 (显示字符和数字)。
3 编程实现
勘探机器人的软件部分主要包括操控软件设计。操控软件是针对勘探机器人而设计的上位机操控软件,软件包括了控制部分和显示界面。上位机操控软件以PC为平台,软件界面清晰简易(如图3 所示)。
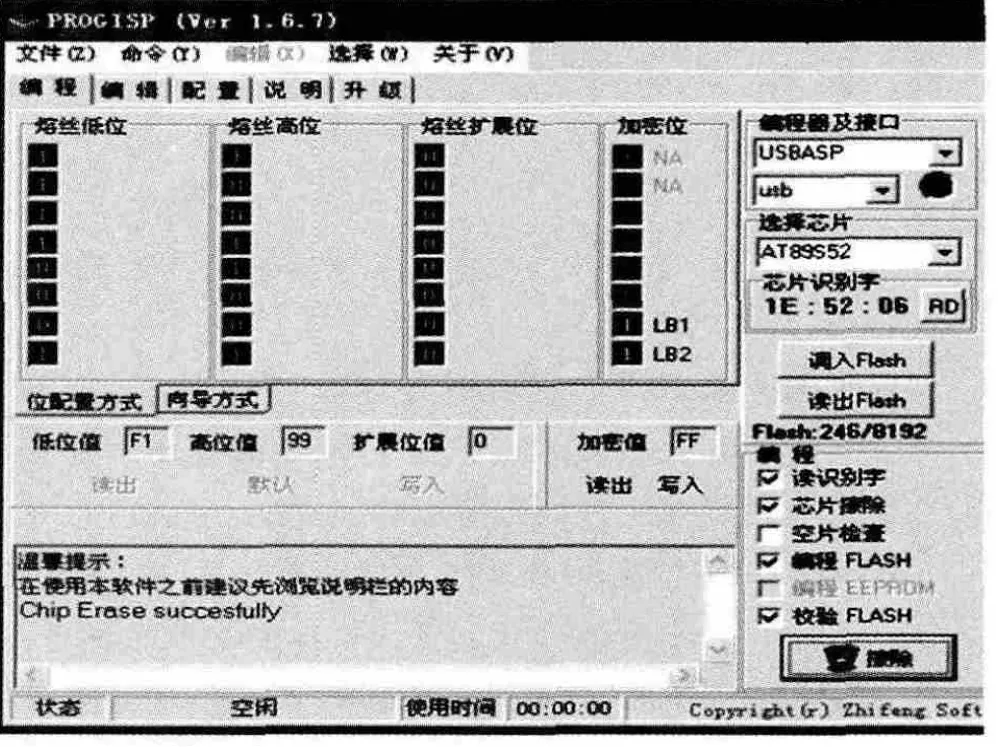
图3 人机交互界面
编程部分程序如下:
4 结束语
此方案选择的器件比较简单,实际中也很容易实现。经过多次测试,结果表明在一定的弧度范围内,小车能够沿着黑线轨迹行进,达到了预期目标。勘探机器人的开发,使得一些危险、人类无法正常完成的活动得以实现,提高了工作效率的同时,稳定性和准确度也得到了提高。
[1] 何利民.单片机高级教程——应用与设计[M].北京:北京航空航天大学出版社,1999.
[2] 吕泉.现代传感器原理及应用[M].北京:清华大学出版社,2006.
[3] 张拓,戴亚文.基于AT89S52 单片机的智能循迹机器人设计[J]. 机电工程基础,2009,3.
[4] 刘波.单片机与液晶控制器的接口设计[J].机械工程 与自动化,2006,4.
[5] 李广弟.单片机基础[M].北京航空航天大学出版社,2001.
猜你喜欢
轨道交通装备与技术(2021年5期)2021-11-19
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
汽车维修技师(2018年7期)2018-12-07
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
核技术(2016年3期)2016-04-19
电子设计工程(2015年15期)2015-02-27
电子设计工程(2015年8期)2015-02-27