基于故障树和BP 网络的飞控系统可靠性分析
2014-01-21 00:51:58谢阳
电子设计工程 2014年20期
谢阳
(西北工业大学 陕西 西安 710072)
控制系统是飞行器的核心组成部分之一,是飞行器的“大脑”,控制系统的可靠性对飞行器整个系统的可靠性有着重要影响。飞行器控制系统本身的组成复杂,整个控制系统是由多个组成单元和若干电子元器件组成的。在飞行器型号设计完成,投入批量生产之后,不同批次的产品中,虽然元器件可靠性都符合国家标准,但由于元器件本身生产批次不同,造成不同批次的元器件间可靠性还是存在有微小的差异,由每个元器件可靠性的差异所累积的控制系统在出厂时的可靠性差异,是和飞行器在使用过程中控制系统可靠性密切相关的,所以,飞行器控制系统在出厂时的可靠度问题不仅是工程产品生产中面临的实际问题,也是需要研究人员着重关注的问题。因此,研究不同批次飞行器控制系统的出厂时可靠性,以及研究出厂时可靠度和使用过程中可靠度的关系,最大限度的掌握不同批次产品可靠性变化的规律,对于保证飞行器控制系统的安全运行和可靠性提升具有重要的意义。
文中首先运用故障树分析法对每个批次的飞行器控制系统进行可靠性分析,计算出控制系统的可靠度,并运用神经网络方法对该型号飞行器控制系统的历史数据进行分析,进而可以根据出厂时的可靠度指标对未来飞行器使用过程中控制系统的可靠度进行预测。
1 故障树方法对控制系统可靠性的分析流程
1.1 构建故障树
故障树是进行故障概率分析的基础,定量计算和定性分析结果的准确性直接受故障树建造的完善程度的影响。建造故障树的步骤如下。
确定顶事件,构造和发展故障树。顶事件通常是指系统最不希望发生的故障事件。从顶事件开始,逐级找出导致各级事件发生的所有可能的直接原因,并用故障树的逻辑符号表示各类事件以及其逻辑关系,直到分析至最底层事件为止。因此,对于一个复杂的系统要构造发展成一个故障树所需要的工作量是显而易见的[1-7]。
本文中飞行器的控制系统主要是由机载计算机、风门调节器控制器、伺服机构等部分构成,根据控制系统的组成部件,建立控制系统的故障树,如图1所示。

图1 飞行器控制系统故障树Fig.1 FTA of aircraft control system
顶事件T:飞行器控制系统故障
中间事件:M1:机载计算机故障;M2:发动机风门调节器控制器故障;M3:伺服机构故障;M4:A/D、D/A 板故障;M5:回收与GPS板故障;M6:陀螺系统故障;M7:模拟电路故障;
底 事 件 :X1:CUP 模块 故 障;X2:A/D、D/A 板 FPGA 故障;X3:运算放大器故障;X4:A/D、D/A 芯片故障;X5:多路模拟开关故障;X6:GPS模块故障;X7:倾斜开采保护功能电路故障;X8:俯仰开采保护功能电路故障;X9:高度开采保护功能电路故障;X10:垂直陀螺故障;X11:磁航向传感器故障;X12:三轴速率陀螺故障;X13:信号处理模块故障;X14:反馈电位器故障;X15:左副翼伺服机构故障;X16:右副翼伺服机构故障;X17:方向舵伺服机构故障。
1.2 故障树分析
故障树构建完成后,需要通过对故障树的分析,来确定控制系统的可靠度,通过计算故障树顶事件的发生概率(系统的不可靠度),可以得出系统的可靠度,其计算方法的方法为:
1)运用下行法求出故障树的最小割集 C1,C2,…,Ck(如表所示);
2)通过实验,得出底事件{X1,X2,…,Xn}发生的概率,则顶事件发生的概率Fs可由 公式1计算得出:

由表1可得,控制系统故障树的最小割集为C1={X1},C2={X2},C3={X3},C4={X4},C5={X5},C6={X6},C7={X7,X8,X9},C8={X10,X11,X12},C9={X13},C10={X14},C11={X15,X16,X17}。
根据GJB150中的规定,用温湿度环境箱,振动试验台等可靠性试验设备对控制系统的各组成模块及元器件做可靠性剔除试验,经过试验得出底事件的失效概率,将失效概率值代入公式(1)求得顶事件发生的概率Fs,得出4个批次产品控制系统的可靠度。

表1 下行法求最小割集Tab.1 Downward method Find minimum cut sets
通过故障树分析法计算出的是产品出厂时控制系统的可靠度,在产品的使用过程中,为了保证飞行器系统的飞行安全,完成预定的任务和计划,我们需要掌握整个控制系统在不同使用年限时的可靠度。针对上述4个批次的产品,进行跟踪记录,可以得到随着使用年限的增长,控制系统的可靠度数值。
2 根据浴盆曲线进行可靠度假设
一般的产品在使用阶段实效率的变化服从浴盆曲线的规律,如图2所示。
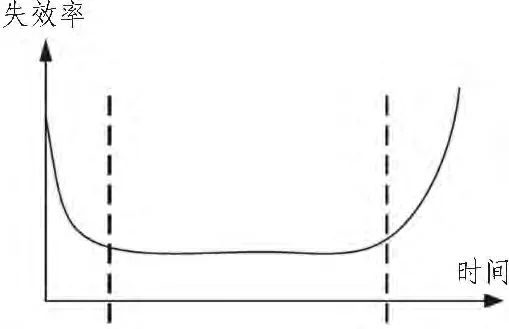
图2 浴盆曲线Fig.2 Bathtub curve
为了后续BP神经网络预测控制系统可靠性方法的验证,根据浴盆曲线失效率变化的规律,假设4个批次产品的可靠度如表2所示。
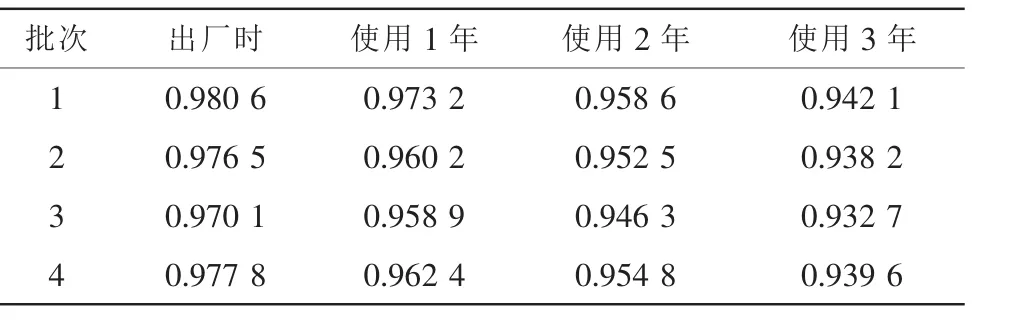
表2 不同时间控制系统可靠度Tab.2 Control system reliability in different time
3 基于BP神经网络对控制系统可靠性的预测
3.1 BP神经网络的基本理论
BP神经网络是人工神经网络的一种,是借鉴人脑的结构和特点,通过大量简单处理单元(神经元或节点)互连组成的大规模并行分布式信息处理和非线性动力学系统[8]。它具有巨量并行性、结构可变性、高度非线性、自学习性和自组织性等特点。因此,它能够解决常规信息处理方法难以解决或者无法解决的问题。BP神经网络最初是由Rumelhart、McCelland等人在1986年时提出的,BP神经网络包括:输入层、隐层和输出层,是一种包含三层或者三层以上的神经网络[2-4]。
针对本文中控制系统可靠性的预测,选用三层结构的BP神经网络,运用单隐层的BP神经网络进行函数逼近。BP神经网络结构如图3所示。

图3 控制系统可靠度预测的BP神经网络结构图Fig.3 BP neural network structure chart of control system reliability prediction
3.2 BP神经网络算法原理
若第p组输入样本为 xp1,xp2,…,xpn,期望输出值为 dp,隐层输出值为yp1,yp2,…,ypn,网络输出值为yp,wij为隐层的第j个神经元节点与输入层的第i个神经元节点之间的连接权值,wi为输出层与隐层的第i个神经元节点的连接权值,激活函数采用Sigmoid函数,则有:
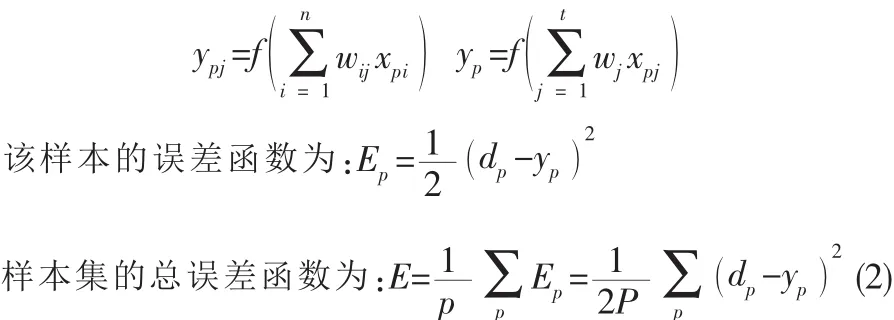
式(2)即为目标函数,神经网络训练的目标是使E达到最小。
运用梯度下降法推导权值的修正公式如下:

式(3)中wij表示第层的第j个神经元与第l-1层的第i个神经元的连接权值;
Qi表示上一层的第个神经元的输入值;
式(5)中wkj表示第l层的第j个神经元与第l+1层的第k个神经元的连接权值;
由于权值沿目标函数的负梯度方向改变,所以权值的改变量为:


式(6)中η为学习因子,为了使神经网络的训练过程具有好的收敛性,η的取值应该是越大越好,但η的值越大,越有导致神经网络训练中发生震荡的可能,为了克服这一问题,需要在权值的修正公式中加入一势态项,权值的修正公式变为:

式(7)中α为动量项。通过调整η和α来调整网络的收敛速度。
BP神经网络的算法可以归纳为两个处理数据的阶段,一个阶段是根据输入的样本数据,从输入层开始,正向的逐层计算,最终由输出层求得网络的输出;另一个阶段是从BP神经网络的输出层开始,逆向的逐层计算,对权值进行修正的过程。通过这两个阶段的反复交替运算,直到BP神经网络收敛。
3.3 神经网络的训练
只要设置的隐含节点数合理,就可以用三层结构的BP神经网络以任意精度的实现任意非线性函数映射的关系[5]。本文中运用已知3个批次在不同使用年限的可靠度预测下一批次在已知初始可靠度情况下以后使用年限的可靠度,正好符合BP神经网络的这一特性。
若飞行器控制系统的可靠度序列为{Ri},已知的可靠度的数据为Ra+1,Ra+2,…,Ra+b,要预测未来时刻的可靠度,既预测Ra+b+r。则函数表达式为:

式(8)中,a,b,r为使用的年数,b为已知可靠度情况的年数,a+1为已知可靠度情况的起始年数,r为将预测的年数。
由表2中已知的可靠度数据情况,选取b为3,输入层的神经元节点数选为2个,既选用Ra+1和a+1+r为输入值,输出层的神经元节点数选为1,既Ra+b+r。对于隐层的神经元数的选取,普遍的认识是,隐层的神经元节点数量越多,神经网络的训练精度越高,但训练的时间也会随着神经元节点数量的增加而增长,所以本文先分别对隐层选用8个、10个和12个神经元节点输入表3中的训练样本值做试预测,预测误差曲线如图4所示。

图4 BP神经网络训练预测误差曲线Fig.4 Curve of BP neural network training prediction
根据上图4分析得出,相对于选用8个和10个神经元的神经网络,当隐层选用12个神经元数时,神经网络的收敛速度相对要快很多,在满足预测误差要求的基础上,预测的误差相对也要小很多,所以选用隐层含有12个神经元的BP神经网络进行飞行器控制系统的可靠性预测。

表3 神经网络训练样本Tab.3 Training sample of neural network
飞行器控制系统的可靠性预测BP神经网络按照式(7)调整权值,以达到式(2)的误差目标条件,从而完成神经网络的训练。神经网络的训练采用MATLAB提供的trainbpx()函数进行,trainbpx()函数是运用动量法和学习率自适应调整的策略,能够提高网络训练的速度,而且增强了算法的可靠性[6]。
3.4 控制系统可靠性预测
BP神经网络训练完成后,即可对飞行器控制系统的可靠度进行预测。BP神经网络的训练样本是由前三批控制系统的数据构成的,可以运用第四批控制系统的可靠度数据对预测方法进行检验。预测结果与历史数据的对比如表4所示。

表4 控制系统可靠性预测数据对比表Tab.4 Control system reliability prediction data contrast table
由表4中数据的对比可以看出,该预测方法能够较准确的预测出飞行器控制系统随着使用年限的增加,可靠度的变化情况。
4 结论
文中提出的运用故障树分析法和BP神经网络分析法相结合的方法,对飞行器控制系统的可靠性做了全面的分析,运用故障树分析法可以准确的由系统的组成部件的可靠度,得到控制系统的可靠度,再根据不同批次飞行器控制系统的可靠度历史数据,运用BP神经网络法进行处理,从而建立了飞行器控制系统出厂时可靠度和使用后可靠度随着年限增加的变化关系。本文提出的“出厂时可靠度”对应的“预测未来年限可靠度”的方法,可以帮助实际工程中的研究和生产人员提高飞行控制系统的可靠度,以及对控制系统进行适时的检测和维修。
[1]宋保维,毛昭勇,李正.系统可靠性设计与分析[M].西安:西北工业大学出版社,2007.
[2]庄喜盈,孟建新.基于BP神经网络的空空导弹贮存可靠性预测模型研究[J].航空兵器,2008(6):59-62.ZHUANG Xi-ying,MENG Jian-xin.Research of Storage Reliability Prediction Model based on BP neural network for air-to-air missile[J].Aero Weaponry,2008(6):59-62.
[3]吴进煌,刘海波.基于BP神经网络的贮存可靠性预测[J].舰船科学技术,2010,32(1):99-101,109.WU Jin-huang,LIU Hai-bo.Prediction of storage reliability based on BP neural network[J].Ship SC Ience and Technology,2010,32(1):99-101,109.
[4]白金鹏,李守仁,罗阿妮,等.神经网络在可靠性分析中的应用[J].应用科技,2002,29(4):7-8.BAI Jin-peng,LI Shou-ren,LUO A-ni,et al.Application of artifical neural network to reliability analysis[J].Applied Science and Technology,2002,29(4):7-8.
[5]俞华锋.神经网络在软件可靠性预测中的应用研究[J].计算机仿真,2008(4):203-207.YU Hua-feng.Software reliability prediction model based on neural networks and particle swarm optimization[J].Computer Simulation,2008(4):203-207.
[6]王蓓,刘桥.优化BP神经网络的可靠性预测模型[J].计算机技术与发展,2007,17(9):102-105.WANG Bei,LIU Qiao.Credible prediction model based on BP neural network[J].Computer Technology and Development,2007,17(9):102-105.
[7]卢明银,徐人平.系统可靠性[M].北京:机械工业出版社,2008.
[8]何达,吴明.Ada-BP神经网络改进算法在电力负荷预测中的应用研究[J].陕西电力,2012(12):21-24.HE Da,WU Ming.Probe into application of Ada-BP neural network improved algorithm in electric power load forecasting[J].Shaanxi Electric Power,2012(12):21-24.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
人民珠江(2019年4期)2019-04-20 02:32:00
电子制作(2018年2期)2018-04-18 07:13:25
自动化学报(2017年7期)2017-04-18 13:41:02
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
计算机工程(2014年9期)2014-06-06 10:46:47
机械工程与自动化(2014年3期)2014-05-07 12:49:22
上海电机学院学报(2013年3期)2013-03-11 18:07:58