基于自抗扰的导弹一体化制导控制设计研究
2014-01-21 00:51:56侯明善
电子设计工程 2014年20期
王 冬,侯明善,周 涛,张 松
(西北工业大学 自动化学院,陕西 西安 710129)
导弹制导与控制系统的传统设计方法通常采用基于串级控制系统频谱分离的思想,忽略制导系统(外环)和控制系统(内环)之间的相互作用,分别单独进行设计后再将它们组合在一起。这种设计方法虽然已证明是简单易行且有效的,但它不可避免地会导致过量的反复设计,也很难协调好各子系统之间的关系,系统设计的保守性大,不利于导弹整体系统性能(尤其是制导性能)的提高。应该指出的是,在末制导段随着弹目相对距离的减小,制导回路的时间常数变小,带宽随之变大,频谱分离的假设不再成立,因此传统的制导控制系统独立设计方法往往会导致导弹在末制导段出现脱靶量较大和弹体失稳等现象。
制导控制一体化设计不同于传统的设计方法,它能够充分考虑制导和控制之间的耦合关系,由于它将二者作为一个整体考虑,根据弹目相对运动信息与导弹自身运动信息直接产生执行机构控制指令,这样既能减少设计周期和成本,还能避免制导系统出现过早失稳现象并大大提高制导精度。早在1983年Williams等[1]就提出将最优控制和估计理论结合用于制导系统设计的一体化思想。考虑到制导控制系统本质非线性特征,Xin(2006)等[2]采用方法研究了六自由度导弹模型下制导与控制一体化最优控制设计问题,该方法通过迭代可近似得到一体化次优控制的数值解,但计算工作量比较大。王文,张保群等(2012)[3]、王先哲(2011)[4]等研究了自适应径向基神经网络进行干扰在线估计,将反演递推方法和滑模控制方法用于带落角约束的导弹俯仰通道制导控制一体化设计问题,由于神经网络的权值选择需要通过学习完成,因此神经网络误差补偿方法工程实现的可靠性很难保证。Yanjun Shu(2012,2013)[5-6]等运用非线性干扰观测器对模型不确定性进行估计和补偿,基于鲁棒动态逆控制方法设计一体化制导控制器。总体上,在一体化制导控制设计中,解决系统模型建模误差、模型非线性和目标干扰等仍然需要做大量的工作。
自抗扰控制(Active Disturbance Rejection Control,ADRC)是一种非线性自适应控制方法,它与传统的PID控制类似,不完全依靠系统的数学模型,而是根据期望信号与实际信号的误差大小和方向来实施,是一种基于过程误差抑制或消除误差的方法,其在干扰抑制、动态特性方面能获得比传统的PID控制更好的控制性能。目前ADRC已经在包括飞行器控制的多个领域得到成功应用。在制导控制设计中,弹体模型误差、测量干扰、目标机动等不确定性是无法回避的问题。由于自抗扰控制方法能够估计并补偿系统的不确定因素,采用这种方法进行一体化制导控制设计具有一些明显的优势。基于此,本文研究了平面拦截条件下自抗扰一体化制导控制设计问题。将目标机动和弹体气动参数摄动、模型误差等作为系统模型不确定性处理形成适合自抗扰控制器设计的串级系统状态模型,给出了自抗扰一体化制导控制器设计,仿真验证了一体化控制器的有效性。
1 制导与控制一体化模型建立
考虑导弹和目标在铅垂面内的相对运动关系如图1所示,图中oXY为惯性坐标系,a、V、θ分别表示导弹 (用下标M)和目标(用下标T)的法向加速度、速度和航迹倾角,R、q表示弹目距离和视线角。

图1 铅垂面内的相对运动Fig.1 Relative motion in vertical plane
由图1可得导弹和目标的相对运动方程满足:

假设制导已处于发动机推力为零的状态,导弹俯仰运动的动力学方程为:
式中ϑ表示导弹的俯仰角,α表示攻角,ωz表示俯仰角速率。Y和Mz分别表示作用在导弹上的升力和俯仰力矩,其表达式为:
式(7)、(8)中的 q表示动压头,s为参考面积,l为特征长度,δz为升降舵偏角;表示升力相关气动导数,表示俯仰力矩相关气动导数。
把(2)式两边对时间求导,并将(1)式代入,得
假设导弹和目标的速度为常数。令Vq=Rq˙,且考虑到目标和导弹的法向加速度关系则式(9)可以写为

由(3)式可得

将式(11)代入式(10),可得

由式(3)、(5)、(6)得

为方便控制器设计,末制导过程近似有cos(q-θM)≈1,这样根据式(4)、(12)和(13)可得到如下的导弹制导控制模型:

其中△Vq,△α,△ωz为目标机动、气动参数变化以及速度为常值等假设条件引起的建模误差,这里将其作为系统的不确定量来处理。式(14)中相关系数表达式如下:
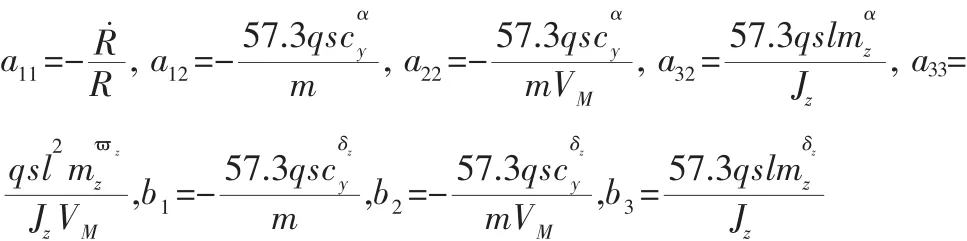
选择状态变量 x1=Vq/a12,x2=α,x3=ωz,控制变量 u=δz。 由于导弹舵偏角产生的升力远远小于攻角产生的升力,忽略舵偏角δz引起的升力项,则由(14)式可得到如下级联系统状态模型[7]:

式中:

制导控制一体化控制器的设计目标为:设计方程(15)的控制u,使得对任意的系统初始条件当t→tf时,x1(tf)→0。这里tf为满足条件R(tf)=0的终端时间。
2 自抗扰一体化控制器设计
自抗扰控制器ADRC具有“扰动估计补偿”功能。对串级系统,ADRC可针对子系统分别设计。每个ADRC由如下几个部分所组成(以二阶子系统为例)[8]:
1)跟踪微分器(Tracking Differentiator,TD)。 根据子系统的输入设定值采用跟踪微分器得到跟踪信号并提取微分信号。
2)扩张状态观测器(Extended State Observer,ESO)。 根据子系统的输出y和控制输入信号u估计出子系统状态x1和x2的估计值z1、z2和作用于子系统的扰动总和z3。这是自抗扰控制器的核心部分,获得的扰动估计量在控制器设计时用来进行扰动补偿,以将子系统化为仅含有两个积分器的简单串联系统。
3)状态误差非线性反馈 (Nonlinear Law State Error Feedback,NLSEF)。 根据子系统的状态误差 e1=v1-z1,e2=v2-z2确定积分器串联子系统的控制规律u0。
4)对误差反馈控制量u0进行扰动估计值z3的补偿,得到最终控制量。
根据一体化控制器设计目标和系统(15)为串级系统的特点,设计3个一阶自抗扰控制器—ADRC1、ADRC2、ADRC3组成一体化制导与控制系统,结构如图2所示。
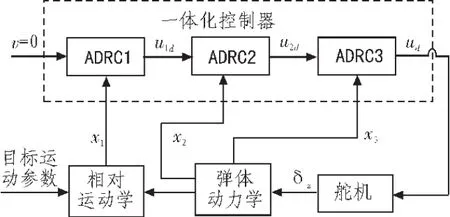
图2 一体化控制器结构图Fig.2 Block diagram of integrated controller
ADRC1:针对系统(15)的第一个子系统(15a),把x2作为虚拟控制量,让x1跟踪其设定输入值v=0。ADRC1的算法为:
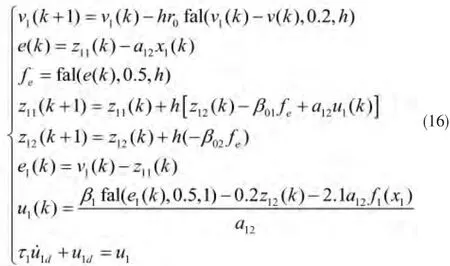
式(16)中 h 表示离散计算步长,r0、β01、β02和 β1为待定设计参数,函数表达式为:
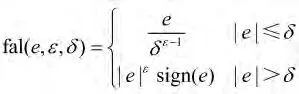
其中δ>0为跟踪误差e的边界参数,ε>0为指数函数的阶次。
另外,式(16)中,子系统的扰动估计量为z12(k),含扰动补偿的非线性控制为u1(k),而u1d为虚拟控制量u1的滤波估计值,τ1为滤波器的时间常数。在设计第二个子系统 (15b)的自抗扰控制器时,使用u1d作为状态变量x2要跟踪的“目标轨线”。
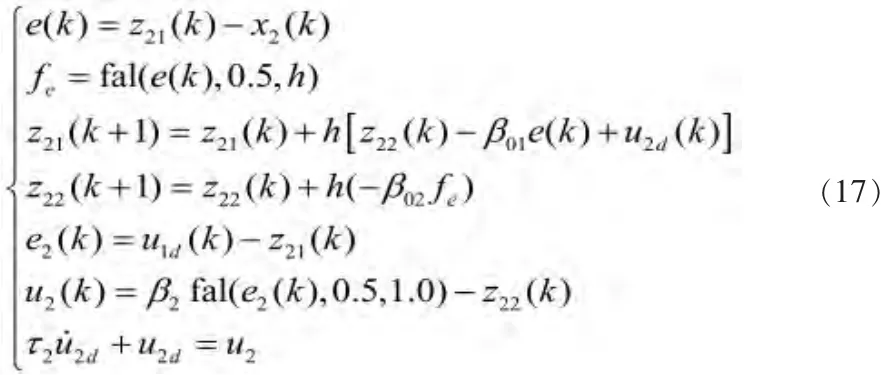
ADRC2:针对系统(15)的第二个子系统(15b),把x3作为虚拟控制量,让x2跟踪子系统1的滤波估计量u1d。子系统的扰动估计量为z22(k),含扰动补偿的非线性控制为u2(k),而u2d为虚拟控制量u2(k)的滤波估计值,τ2为滤波器的时间常数。ADRC2的算法为(设计参数意义同前):
ADRC3:针对系统(15)的第3个子系统(15c),子系统的扰动估计量为z32(k),含扰动补偿的非线性控制为u(k),而ud为控制量u的滤波估计值,τ3为滤波器的时间常数。注意:系统的最终控制量也为ud,它控制状态x3使其跟踪子系统2的滤波控制量u2d。ADRC3的算法为(设计参数意义同前):

式(16)~(18)就是基于自抗扰的导弹一体化制导控制器设计结果。
3 仿真验证
为了验证本文一体化控制方案的有效性,根据一种导弹的气动参数进行仿真。
取导弹马赫数为M=3.5,按照高度8 000 m时当地音速Vs=308.07 m/s计算速度,导弹的初始俯仰角速率ωz(0)和攻角α(0)均为 0。导弹初始坐标 xM(0)=0 m,yM(0)=8 000 m。目标速度为VT=900 m/s,目标作幅值为 6 g、周期为2 πs的正弦机动。导弹和目标的初始航迹角,目标的初始位置分别选择以下4种初始条件:
条件 1:θM=0°,θT=0°,xT(0)=1 000 m,yT(0)=8 400 m。
条件 2:θM=10°,θT=10°,xT(0)=1 000 m,yT(0)=8 400 m。
条件 3:θM=20°,θT=10°,xT(0)=1 000 m,yT(0)=8 400 m。
条件 4:θM=25°,θT=-130°,xT(0)=3 000 m,yT(0)=10 000 m。导弹各标称气动参数为:

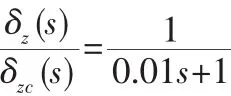
假设舵机模型为时间常数为0.01 s的惯性环节,即
导弹姿态及舵机约束条件为:

自抗扰控制器中的仿真参数选为:

表1是4种条件下弹体气动参数不摄动和摄动量为标称值的+20%情况下仿真得到的脱靶量和拦截时间结果。图3至图8给出了初始条件2下的弹道特性仿真曲线。

表1 制导性能仿真结果Tab.1 Simulation results of guidance performance

图3 垂直于视线方向相对速度变化曲线Fig.3 The curve of relative velocity in the vertical direction of the line of sight
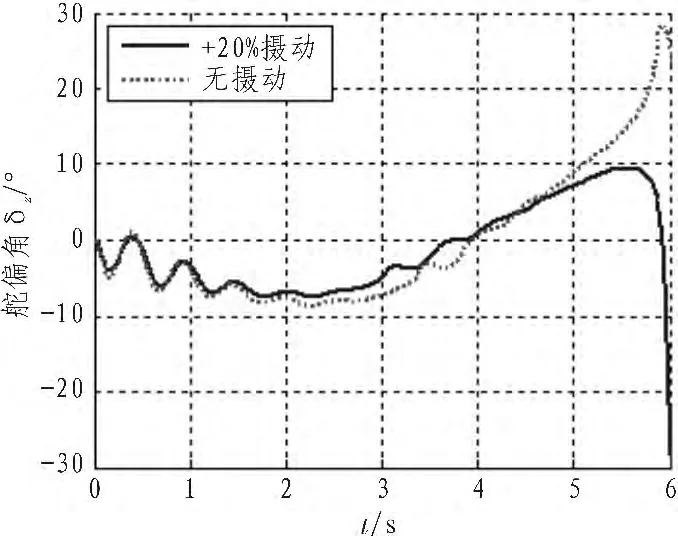
图4 舵偏角变化曲线Fig.4 The curve of actuator deflection angle
根据表1数据,基准弹体气动参数条件下脱靶量均值为0.53 m,均方差为0.36 m;气动参数摄动情况下脱靶量均值为1.06 m,均方差为0.66 m。虽然气动参数摄动导致脱靶量增大,散布区域也增大,但总体看目标机动加速度较大时制导性能仍然维持较好,说明制导的鲁棒性比较强。
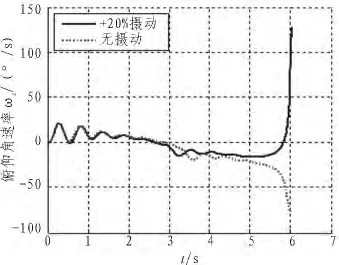
图5 俯仰角速率变化曲线Fig.5 The curve of pitch rate

图6 攻角变化曲线Fig.6 The curve of attack angle
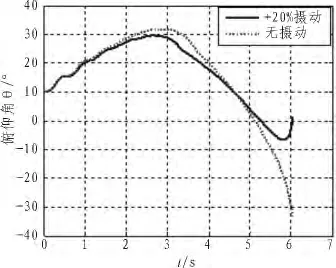
图7 俯仰角变化曲线Fig.7 The curve of pitch angle

图8 导弹和目标的运动轨迹Fig.8 Trajectory of the missile and the target
图3 是一体化控制器垂直于视线方向的相对速度Vq和估计值比较曲线,可以看到扩张状态观测器观测效果良好。图4的导弹舵偏角曲线和图5的导弹俯仰角速率曲线表明,初始段虽有小幅振荡,但末段比较平稳。图6和图7说明导弹攻角、俯仰角变化平稳。总体上弹体控制特性曲线差异性主要体现在弹道末端,参数摄动变化并未引起弹体控制特性变差,说明控制的鲁棒性良好。
4 结论
本文基于自抗扰控制方法研究了一体化制导控制设计问题。根据弹目相对运动模型和弹体模型,通过适当简化得到了具有串级特性的制导控制模型,利用自抗扰控制方法设计了自抗扰一体化制导控制器。
自抗扰一体化制导控制器由3部分组成,控制器1主要解决抗目标机动扰动问题,控制器2主要解决抗弹体气动力模型不确定性问题,控制器3主要解决抗弹体气动力矩模型不确定性问题。仿真结果表明基于自抗扰控制方法的一体化制导控制具有较强的抗弹体气动参数摄动和目标机动的鲁棒性,同时维持了制导和控制的鲁棒性。另外,这种控制方法由于不需要预估模型不确定量的界,控制算法复杂性低,也易于实现。
[1]Williams D E.Design of an Integrated Strapdown Guidance and Control System for a Tactical Missile[R].AIAA-83-2169,1983.
[2]Xin M,Balakrishnan S N,Ohlmeyer E J.Integrated Guidance and Control of Missiles with Method [J].IEEE Transactions on Control Systems Technology,2006,14(6):981–992.
[3]王文,张保群,董继鹏.基于自适应神经网络的导弹制导与控制一体化反演设计[J].航空兵器,2012(5):13-19.WANG Wen,ZHANG Bao-qun,DONG Ji-peng.Integrated backstepping design of missile guidance and control via adaptive neural network[J].Aero Weaponry,2012(5):13-19.
[4]王先哲,吴庆宪,姜长生.带落角约束的导弹制导与控制一体化设计[J].航空兵器,2011(6):23-28.WANG Xian-zhe,WU Qing-xian,JIANG Chang-sheng.Integrated design of missile guidance and control with terminal angular constraint[J].Aero Weaponry,2011(6):23-28.
[5]SHU Yan-jun,TANG Shou.Integrated robust dynamic inversion design of missile guidance and control Based on nonlinear disturbance observer[C]//2012 4th International Conference on Intelligent Human-Machine Systems and Cybernetics,2012:42-45.
[6]舒燕军,唐硕.轨控式复合控制导弹制导与控制一体化反步设计[J].宇航学报,2013,34(1):79-85.SHU Yan-jun,TANG Shuo.Integrated guidance and control backstepping design for blended control missile based on NDO[J].Journal of Astronautics,2013,34(1):79-85.
[7]张保群.导弹俯仰通道制导与控制一体化设计[D].哈尔滨:哈尔滨工业大学,2008.
[8]韩京清.自抗扰控制技术—估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
猜你喜欢
天然气与石油(2022年4期)2022-09-21 07:05:54
数学物理学报(2022年4期)2022-08-22 04:06:36
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
数学物理学报(2019年4期)2019-10-10 02:38:56
测控技术(2018年9期)2018-11-25 07:44:24
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
电源技术(2015年11期)2015-08-22 08:50:38