
基于模糊PID解耦算法的多功能禽舍环境控制系统设计
2014-01-20 08:38于全刚
家畜生态学报 2014年10期
柴 钰,于全刚
(西安科技大学电气与控制工程学院,陕西西安710054)
随着我国禽类养殖的规模化发展,各种各样的科学管理方法应用其中,切实达到了高效、省时、省力的效果。然而固有的管理方法在不同的气候和坏境下,产生的效益时好时坏,所以设计一种可靠有效而且经济方便的禽类环境控制系统来代替人工管理已是当务之急[1-2]。目前国内的禽类养殖普遍使用较低端的处理器进行温湿度的控制,由于温湿度之间的耦合关系,温湿度难以同时到达设定值,针对此本研究设计出一种基于数字信号处理芯片(Digital Signal Processing,DSP)的多功能禽类环境控制系统,加入模糊比例积分微分(Proportion Integration Differentiation,PID)解耦算法把温度和湿度通过解耦进行控制,较以往的控制系统最大的优点在于智能化高,信息监测实时性好。
1 控制器系统设计方案
1.1 硬件系统设计
针对我国禽类养殖业现状,本文提出一系列可行性方案,建立了多功能禽舍环境控制系统。硬件控制系统大体可分为四个部分:主控单元、信息采集单元、执行控制单元与远程控制单元。系统硬件架构框图如图1所示,主控单元包含DSP 处理器、系统时钟、信息采集与发送总线,功能是分析计算与下达控制命令的中心。信息采集单元包含了影响禽类生长因素的所有传感器,例如无线温湿度传感器、气体检测传感器、压力传感器等。其中无线温湿度传感器能够灵活地对不同点进行采样,从而达到无盲区的检测。执行控制单元接收到DSP下达的指令,进而控制设备,例如摄像头、热风机、通风机、湿帘、喷雾器等。远程控制单元包括上位机与手持设备,能够把主控单元发送的数据显示在终端上,内容包括实时监控画面、调节信息、当前禽舍环境状况信息以及报警信息等。同时终端能够向禽类环境控制器发送控制命令,使控制效果更佳。
通过主控单元上的触摸屏或者上位机或者手持终端来设置主控单元;通过信息采集单元将数据采集后上传至主控单元,然后主控单元对数据进行分析计算;主控单元将计算结果发送给上位机或者手持设备,同时向执行控制单元发送控制指令。执行控制单元接收到执行指令后,进而控制设备进行调节;信息采集单元不断将禽舍中的环境参数采集,上传到DSP,经过处理并显示。
1.2 部分硬件选型
DSP选取TMS320F28335,该数字信号处理芯片为浮点型,主频150 MHz,拥有6 个直接存储器访问(DMA)通道,内存相对于同系列其他DSP 更高,在算法处理上会满足更为复杂的运算。丰富的通讯模块如:SCI,I2C,SPI等,可以满足工业触摸屏,无线通信等要求。配有16个12位ADC通道可以满足多个传感器的使用。12个可配置外部中断可充分应对复杂的外部变化。PWM 功能特色比较显著,可产生更为精准的PWM 波[3]。
选用的无线温湿度传感器模块能够组建基于ZigBee协议无线网络,通过搭建485 转232 模块,可在该无线传感器网络中建立一个基站(上位机)。满足多角度温湿度检测需求。传感器型号为JWSK-80EW,温度测量范围:-20 ℃~60 ℃精度为:0.5 ℃;湿度范围:0% RH~100% RH,精度3% RH。此外网络节点多,通讯距离远以及抗干扰能力强也符合现代化大型养殖场地的要求。
由于传统的锅炉供暖会给环境带来一定的污染,我国将逐步淘汰该供暖方式。锅炉燃烧天然气的代价太高,因此在该系统中尝试使用电来供暖。该系统采用BRYS-400暖风机,该暖风机以水为导热介质,使得保温更持久。

图1 禽类环境控制系统硬件架构框图Fig.1 Birdhouse environment control hardware structure diagram
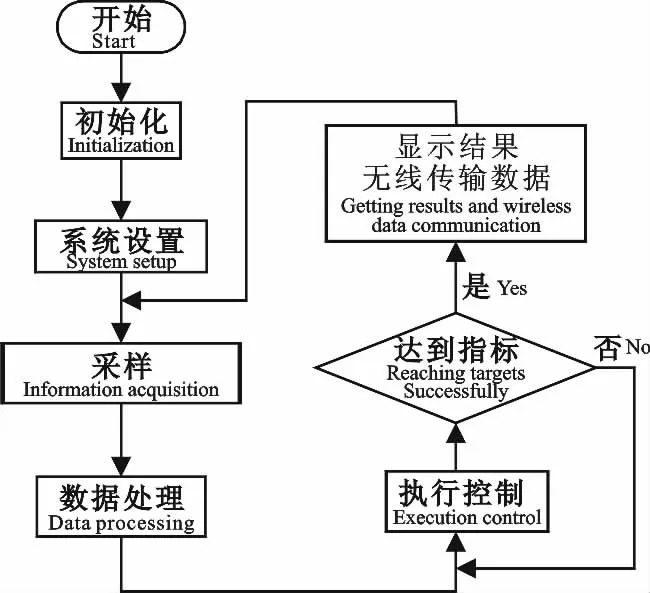
图2 主程序流程图Fig.2 Main program flowchart
1.3 软件系统设计
如图2所示,该系统主程序是一个闭环控制系统。启动系统将进行初始化,之后系统设置,输入当前鸡舍参数,包括当天入舍鸡只日龄,指定风机启动数目等;DSP给信息采集总线模块分配数据采集任务,传感器开始采集数据,经过简单数据融合后上传到DSP;数据处理部分主要功能是将采集的数据以及系统设置输入的信息代入算法中运算,得到一系列将要执行控制数据结果;执行控制部分通过继电器组进而控制风机、排风机以及加热器等。动作完成后系统将实时检测舍内数据,待舍内环境稳定后将检测当前状态是否满足要求;结果显示在触摸屏上或通过无线发送给上位机或手持终端。
此处例举一下报警中断子程序。报警模块任务是当遇到故障或者检测到数据错误时实现报警输出,如温差比较大或风机启动数量与设置的不一样时。为简化程序,在外部电路中撘有硬件检测掉电电路,实现掉电报警喇叭将脱离系统进行报警。如图3所示为报警中断子函数流程图。检测数据错误,如当前室温与理想温度相差2 ℃以上或者湿度差距30%RH 或者风机启动数量与设置的数量不同等;当检测出错误后,信息上传至DSP显示,报警器输出报警;系统得到报警信息后,调整该报警事件优先级,采取相应措施,如采用喷雾器强加湿措施;检测报警是否解除,若解除系统正常,否则继续报警;
2 控制算法设计
2.1 禽舍结构与控制算法的联系
往往采用严格的科学管理模式也总与理想状态下有很大的差距,主要由于一些不可避免的外界因素的影响,例如饲养员消毒不彻底,气流、温度与湿度的不均匀性可能导致禽类疾病的发生[3]。因此合理的禽舍结构布局与控制效果好的控制算法是系统设计的重中之重。
本系统充分考虑到了影响禽类生存环境的几大因素,如温度、湿度、通风量等。不同家禽的习性略有不同。本系统暂以白羽肉鸡为养殖对象来定向分析。如图4所示为本系统所采用的高床湿帘组合的禽舍结构,该结构显著优点有:通风量均匀,风流缓和,降温加湿均衡以及卫生指标高。
进风口位于高处,通过分流管道使得进风量平均分散到鸡舍空间中。当禽舍需要升温时,风机、加热器与排风机开始工作,即吹进热风;需要降温时湿帘与排风机工作;加湿与降温时,为避免靠近湿帘的鸡只着凉,特别设计的隔湿墙,使湿度较高的气流上升,越过隔湿墙后自上而下均匀扩散,较没有隔湿墙的加湿降温效果更合理[4]。
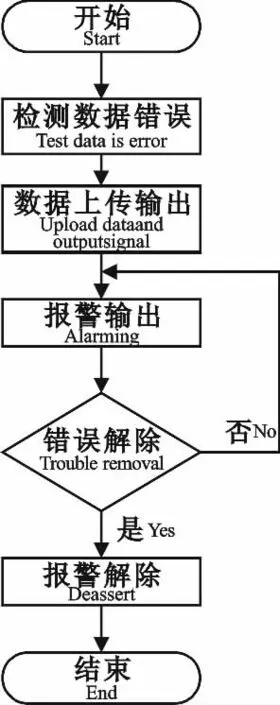
图3 报警中断程序流程图Fig.3 Alarm interrupt program flowchart

图4 禽舍结构示意图Fig.4 Birdhouse structure diagram
2.2 被控因素的研究
白羽肉鸡在37~43d,随着日龄增加,禽舍环境的温湿度总体呈下降趋势。而通风量则为上升趋

图5 鸡只日龄与温度关系曲线图Fig.5 Graph of relation between chicken age and temperature
该系统控制因素有温湿度、通风量、光照、气体质量、补水量以及饲料供给量。其中除温湿度因素外,其他因素都是容易控制的。由于现实中温湿度有严重的耦合现象,即在提高湿度时温度会降低,提高温度时湿度会降低。在禽舍结构设计上也是充分考虑到温湿度变化的均匀性,使得温湿度控制算法更好的应用到现实中。在该系统搭建时设想排风机按照排风量需求、加温、降温加湿而运行,温度调节最小间隔0.5 ℃,湿度最小间隔10% RH。如图8所示为本系统采用自整定模糊PID 温湿度解耦控制算法[5-6]框图。该算法为双输入输出通道,即现实温湿度输入,输出温湿度调节量。其中r1与r2为温势,通风量要严格参考每个鸡只的日呼吸量以及空气质量。如图5~7为白羽肉鸡的日龄与温度、湿度以及呼吸量的曲线,此外还有鸡只日龄与平均体重,光照时间以及进食量有关。在实际控制中要严格按照该曲线执行控制。湿度输入量,e1与e2为输入偏差量,ec1与ec2为输入偏差导数量。PID 控制算法应用最广,优点在此不作介绍。该系统是一个多变的复杂系统,而PID算法需要设定参数来满足一个固定的数学控制模型。为使其自动调节三个参数(比例、微分、积分)而采用模糊控制算法。模糊控制算法与PID 在参数设置上类似,需要依靠经验来验证参数,直到效果更佳为止。算法设计最后一部分体现了温湿度的耦合关系,为使得系统便于控制而对其进行解耦[7-17]。
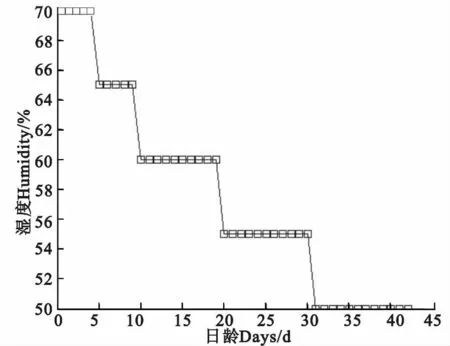
图6 鸡只日龄与湿度关系曲线图Fig.6 Graph of relation between chicken age and humidity
2.3 自整定模糊PID 温湿度控制算法
现代控制算法中PID 控制算法比重占到85%到90%,其控制优点不言而喻,PID控制算法不再描述。对于系统的模糊控制部分最大的特点为双输入三输出,以下详细介绍系统输入模糊化,隶属函数的选取,推理机设计以及输出解模糊化[18-20]。

图7 鸡只日龄与呼吸量关系曲线图Fig.7 Graph of relation between chicken age and respiratory capacity
模糊系统输入量(温湿度偏差以及偏差导数)模糊化,取模糊量“正大”(PB)、“正中”(PM)、“小”(PS)、“零”(ZO)、“负小”(NS)、“负中”(NM)、“负大”(NB)。现以温度来说明,温度最大要求不得高于或低于理论温度2 ℃,e=≤0.5 ℃时视为稳定。温度偏差模糊化后如表1所示。
温度偏差导数可用两次温度采样差值来表示。模糊化如温度偏差一样,取模糊量“正大”(PB)、“正中”(PM)、“小”(PS)、“零”(ZO)、“负小”(NS)、“负中”(NM)、“负大”(NB)。试验中连续两次采样温差最大为0.8 ℃,于是确定ec变化范围为[-0.8,0.8]。为了便于计算取η=5×ec,即η模糊化后如表2所示。

图8 自整定模糊PID 温湿度解耦控制算法框图Fig.8 Self-turning fuzzy PID temperature and humidity decoupling control algorithm diagram

表1 偏差e模糊子集量化Table 1 Fuzzy subsets of deviation e
输出的模糊控制量P,I,D 经过解模糊化(kp=

表2 误差变化量η模糊子集量化Table 2 Fuzzy subsets of temperature deviation variationη
P/10,kI=I/50,kI=D/10)后可得到及kD,代入(ek-ek-1)可得到调整量,调整量根据不同的值对应输出控制的PWM 占空比不同,进而控制热风机的转这。取模糊量“正大”(PB)、“正中”(PM)、“小”(PS)“零”(ZO)。条件推导语句如下:

表3 输出P模糊子集量化Table 3 Fuzzy subsets of output P

表4 输出I模糊子集量化Table 4 Fuzzy subsets of output I
输出模糊子集(P,I,D)量化见表3~5。表6为模糊控制规则表。

表5 输出D 模糊子集量化Table 5 Fuzzy subsets of output D

表6 模糊规则Table 6 Fuzzy rule
仿真后得到系统阶跃响应曲线如图9所示,系统稳定时间约为0.5秒,温湿度调节过程比较迅速,因此该响应特性可以满足设计要求。
2.4 温湿度解耦控制算法
解耦方法有多种,在这里采用代单位阵解耦方法。单位阵解耦需要假设一个解耦矩阵,使其满足关系式:

其中:

经过反复验证得到耦合矩阵如下:
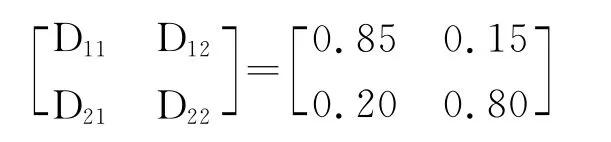
系统耦合部分关系式变为:


图9 自整定模糊PID 温度控制系统阶跃响应Fig.9 Step response curve of self-turning fuzzy PID temperature and humidity control system
如图10所示系统耦合部分解耦后等效图。

图10 解耦等效框图Fig.10 Decoupling equivalent diagram
3 现场调试验证
为验证该系统在实际中应用的效果,试验鸡舍位于山东省青岛市郊外某地,为较传统的非高床温室结构,结构缺点,空间温湿度均匀性不理想。经过测试:在200m3空间内能够实现15min内最大调整温度2℃,湿度30%RH。对其记录的24小时温度观测数据如图11所示温度调节曲线。在12∶00时设定温度由35 ℃改为34 ℃,湿度由80%RH 改为60% RH。用过测试数据可以得到如下结果:温度跳变范围小于0.5 ℃,湿度变动范围少于5%RH;气体检测结果CO2浓度3700PPM,NH3浓度为43PPM。
4 小结
本研究设计了一种基于DSP 的禽舍环境控制系统,并且采用自整定模糊PID 温湿度解耦控制算法进行实时数据分析。该系统优点是温湿度控制精确度高,有害气体浓度能够控制在正常范围以内;采用无线实时监测,监测点多,可节省大量人力;适应性高,通过修改参数设置,即可满足不同环境下的使用要求;系统节能性高,卫生性符合标准,控制效果显著等。试验证明该系统符合现代化养殖需求,具有推广的潜力。

图11 舍内外温湿度对比曲线Fig.11 Correlation curve of inside and outside temperature and humidity
[1]陆华萍,孔建华.浅谈鸡呼吸道疾病的综合防治[J].畜牧兽医科技信息,2013(1):85-85.
[2]王进圣,正大集团.鸡舍环境控制与生物安全[J].北方牧业,2013(14):15-16.
[3]刘陵顺,高艳丽.TMS320F28335DSP 原理及开发编程[M].北京:北京航空航天大学出版社,2011.
[4]Chepete H .J,Xin H.Ventilation rates of a laying hen house based on new VS.old heat and moisture production data[J].Agricultural and Biosystems Engineering,2014,1:835-841.
[5]李东卫,卢庆萍.模拟条件下鸡舍氨气浓度对肉鸡生长性能和日常行为的影响[J].动物营养学报,2012,24(2):322-326.
[6]邵建梅.温湿度系统的解耦GPC 控制算法仿真[J].航天医学与医学工程,1997,12(6):434-438.
[7]吴兴纯,吴瑞武,杨燕云.基于单片机的培养箱温湿度数字解耦控制系统设计[J].计算机测量与控制,2012,20(2):371-373.
[8]马万征,毛罕平,李忠芳.温室环境多变量控制系统解耦现状及发展趋势[J].江苏农业科学,2012,40(2):313-314.
[9]钟应善,杨家强,邓劲莲.温室温度和湿度的多变量模糊控制技术[J].农业机械学报,2001,32(3):75-78.
[10]周国玺.浅谈鸡舍的环境控制[J].现代农村科技,2011(9):46.
[11]陈慕君,张剑锋.温室大棚温湿度检测系统模糊解耦算法设计[J].科技创新与生产力,2011,(6):25-27.
[12]程文锋,杨祥龙,王立人.温室温湿度的反馈前馈线性化解耦控制[J].东南大学学报,2012,42(9):5-10.
[13]伍 韬,郭新军.基于神经元PID 解耦算法的温湿度控制方法[C].昆明:第十五届海峡两岸无线电技术研讨会,2010:262-265.
[14]王军琴.基于神经网络的增量PID 算法及仿真研究[J].现代电子技术,2010(18):15-29.
[15]陶 平,肖超.基于对角递归神经网络的在线自整定解耦控制算法[J].机床与液压,2013,7(6):123-128.
[16]李 娜.档案库房温湿度调控方法研究[J].计算机时代,2012(9):37-38.
[17]易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,2009.
[18]Kubota C.Dynamic modeling and simulation of greenhouse environments underseveral scenarios:a web-based application[J].Computers and Electronics in Agriculture,2010,70(1):105-116.
[19]Zhang Rongbiao,Huang Xianlin.Adaptive decoupling design of constant temperature and humidity control system based Oil GPC and multi-model control[J].Applied Mechanies and Materials,2011(43):308-311.
[20]黄卫华,方康玲.模糊控制系统及应用[M].北京:电子工业出版社,2012.
猜你喜欢
中国动物保健(2021年3期)2021-11-23
计算机与数字工程(2021年1期)2021-02-25
家禽科学(2020年2期)2020-04-14
当代畜禽养殖业(2018年12期)2018-04-12
制造技术与机床(2017年6期)2018-01-19
家禽科学(2018年10期)2018-01-16
兽医导刊(2017年16期)2017-04-05
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20
