
一种电动车用电机驱动控制器的设计
2014-01-18 07:26何跃军
深圳职业技术学院学报 2014年1期
何跃军
(深圳职业技术学院机电学院,广东深圳518055)
一种电动车用电机驱动控制器的设计
何跃军
(深圳职业技术学院机电学院,广东深圳518055)
介绍了一种电机驱动控制器的设计方案.该控制器控制对象为功率在1~5 kW范围内的无刷电动机,适用于多种中型电动车的驱动控制.与采用传统的直流电机或异步电机驱动控制器相比,本驱动控制器采用无刷电机作为驱动电机,具有能流密度高、使用寿命长、调速范围宽、维护成本低等优点.驱动控制器采用正弦波空间矢量控制(SVPWM)策略,既保留有同步电机矢量控制策略的动力性能好、转矩脉动低等优点,又省略了矢量控制所必须需的转子编码器,因而控制方式更为简洁、可靠,且成本低.驱动控制器以Microchip公司的DSPIC33FJ32MC204控制芯片作为控制核心,使用大功率MOSFET作为开关管,分立式驱动电路驱动,具有驱动信号硬件互锁、过流、欠压、过压、过热等多重保护功能.
电动车;无刷直流电机;驱动;控制系统;正弦波控制
目前市场上销售的电动巡逻车、高尔夫球车、观光车等中型电动车绝大部分采样技术成熟的有刷电机或异步电机.而无刷直流电机,由于其具有能流密度高、使用寿命长、调速范围宽、维护成本低等优点,正逐步受到电动车制造厂商的关注和用户的欢迎.对于其控制核心——无刷电机驱动控制器,目前一般都是采用方波驱动方式,其特点是价格便宜,但转矩脉动大,控制精度低,动力性能较差;而控制器采用同步电机矢量控制方式,虽然能极大地降低转矩脉动,提高动力性能,但控制复杂,且需要在转子上安装价格较为昂贵的编码盘,由此带来制造成本的上升,不易被广大低端用户接受.基于此,本控制器设计采用简易正弦波驱动控制方式[1-3],与方波控制方式相比,成本相差不大,但由于能较大程度地降低电磁转矩脉动,因而所控电机的动力性能要优越许多,且简洁、可靠。
1 系统总体构成
本电动车控制系统原理框图如图1所示.驱动控制系统具有启动平稳、有力,加速快等特点,能执行无极调速,定速巡航,倒车等多种操作,具有驱动信号硬件互锁、过流、欠压、过压、过热等多种保护功能.
本驱动控制系统控制对象为浙江尤耐特电机公司生产的无刷直流电动机,型号为BLT3/6-2500/72,适用于电动巡逻车、高尔夫球车、观光车等中型电动车辆的驱动控制,本无刷电机主要参数见表1.
控制系统主电路为三相H桥结构形式,功率开关管则采用是的大功率MOSFET.系统利用相位差120度的3个霍尔传感器,进行位置信号的检测.控制电路以美国Microchip公司的DSPIC33FJ32MC204为控制核心,该芯片既有单片机具有的使用便捷、价格便宜等特点,又内嵌有DSP内核,极大地提高了其数据处理能力,因而很适合无刷电机控制

表1 系统电动车用无刷电机参数表
系统控制板由主控芯DSPIC33FJ32MC204及其外围电路、功率驱动电路、霍尔位置检测电路、直流母线电流检测与过流保护电路、刹车电路、驱动器温度检测电路、蓄电池电压检测电路等构成.同时,控制板还留有485接口,便于与电动车其他设备进行通信,以扩展功能.

图1 电动车驱动控制系统原理框图
2 控制电路设计
2.1驱动控制电路
由于本系统为低压蓄电池大电流供电系统,而市场现有的集成功率驱动模块均不能满足其功率要求,因此设计中,主电路采用分立元件构成,每路开关管均采用4个同规格的N沟道绝缘栅型功率MOSFET管并联方式,为减少大电流带来的开关元件的发热、寄生电感和电容、分布电感等影响,系统在设计上采用了“铝基覆铜板”的散热方式[4],从而使系统的可靠性和散热性同时得到了提高.
系统驱动电路原理如图2,采用铅酸蓄电池(供电电压为VCC=72V),为驱动器以及电机提供能量,此电压经过辅助开关电源DC/DC变换,产生VCC1=15V的MOSFET管栅极电压,用于主开关管(MOSFET)的开通控制.该驱动电路还具有硬件死区保护功能,如当上管驱动信号BH为高电平时,上管导通;而此时,在下MOS管驱动电路中,Q21,Q20导通,因而下MOS管 MB15被截止,从而实现上下MOS管驱动信号的硬件互锁,提高了驱动电路的可靠性.
2.2电流检测电路
系统电流检测电路如图3所示,其目的是实时监测控制器母线电流大小.母线电流在电阻R25上的采样电压Vi,经过LM358变换后,送至主控芯片的A/D输入口进行A/D转换.由于系统采用SVPWM控制,采样电流频率与PWM脉冲频率相同,因而采样电流叠加了众多高次谐波分量,且相位上滞后,影响采样效果.为此,系统在设计中,采用了由R24和C11组成的一阶滤波环节先行滤波后,再送入控制器主控芯片DSPIC,效果较好.
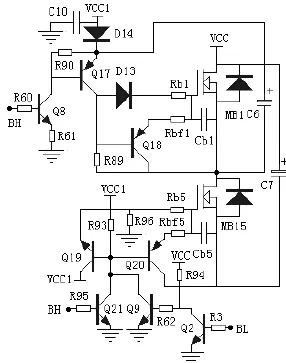
图2 系统驱动电路原理图

图3 电流检测与过流保护电路
2.3过流保护电路
在电动车驱动控制系统里,过流保护十分关键,为此本设计采用了软、硬件双重过流保护功能.电流检测电路如检测出电流过大,则主控芯片立即响应,通过软件,关闭芯片PWM输出口信号,开启软件保护,以保护系统免受损害.
系统硬件过流保护电路如图3,系统采样电流为母线电流,以康铜丝作为采样电阻.系统硬件过流保护原理如下:
当采样电阻R25电流过大时,比较器LM358输出高电平,控制三极管Q30基极导通,Q30集电极输出低电平过流信号,该信号通过与门,直接封锁驱动电路六路PWM信号,使得电机停转,从而达到硬件保护的目的.
3 控制系统软件设计
3.1软件设计概述
系统控制软件采用MPLABCC30语言和汇编语言混合编写,具有模块化设计、可读性好、维护方便等特点.考虑到电机控制对快速性和实时性要求较高,采样周期应尽可能得短,同时综合考虑抑制谐波、降低损耗的需要,主控芯片工作频率选取为20 MHz,而载波频率取为20 kHz,以使噪声频率避开人体听觉范围.上下MOS开关管死区时间设定为2μs.
为减少软件时间开销,程序在转速计算、转子相角增量和正波幅值计算时,都调用了汇编语言的“乘”(_builtin_muuluu)、“除”(_builtin_divud())函数形式,从而减小了计算量.
本系统控制软件,目前已获得国家计算机软件著作权授权,软件名称:电动车PWM控制系统软件,登记号:2013SR041481.
3.2控制软件设计原理
控制系统软件设计原理为:驾驶员通过脚踏电子油门,产生0-5V的速度给定信号,送入主控芯片DSPIC后,经过 A/D转换,产生速度给定值.DSPIC根据三相霍尔传感器输入信号,计算出电机当前转速值和电机转子当前区间值.速度给定值与当前速度值之差,经过PID算法,即可确定正弦波的幅值大小.由转子当前区间值和速度值,即可算出电机PWM周期中的转子相位角的增加量、正弦波当前相位和转子的实时相位.由正弦波当前相位、正弦波的幅值,这两个参数,主控芯片通过矢量控制算法,即产生SVPWM信号波,控制电机运行.
3.3程序设计介绍
控制软件系统主要由主程序和中断服务子程序两部分组成.
3.3.1 主程序
主程序在进行完控制参数、各个端口、各个相关中断的初始化后,打开相应的中断,然后进入死循环,等待启停命令和转向命令,并随时响应各相关中断.主程序流程图如图4.
3.3.2 中断服务子程序
中断服务子程序主要包括定时器T1中断子程序、输入捕捉IC1,IC2,和IC7中断子程序、电子油门A/D转换中断子程序及MCPWM 中断子程序等.其中,3个IC捕捉中断作用在于实时捕捉3个霍尔位置传感器发出的位置信号,并结合无刷电动机的旋转方向,得出电机将要进入的扇区的大小值,而MCPWM中断,则主要进行SVM矢量计算,本文重点介绍A/D中断和T1中断.

图4 系统主程序流程图
3.3.2.1 A/D中断子程序
A/D中断子程序,其作用是定时对电子油门速度给定电压、母线电流、蓄电池电压、驱动器温度等模拟量进行循环采样,并完成以下工作:
1)计算当前速度期望值.
2)根据采样得出的母线电流值,判断是否进行过流保护.
3)根据采样的蓄电池供电电压值,判断是否进行过压、欠压保护.
4)根据采样的驱动器温度值,判断是否进行过热保护.
3.3.2.2 定时器T1中断子程序
在软件中,通过设置T1初始化子程序,每1ms产生一次T1中断.中断服务子程序流程图如图5所示,其主要功能阐明如下:
1)根据IC2捕获中断记录的相邻霍尔信号脉冲计数值,计算出电机正弦波电流周期和实时转速.
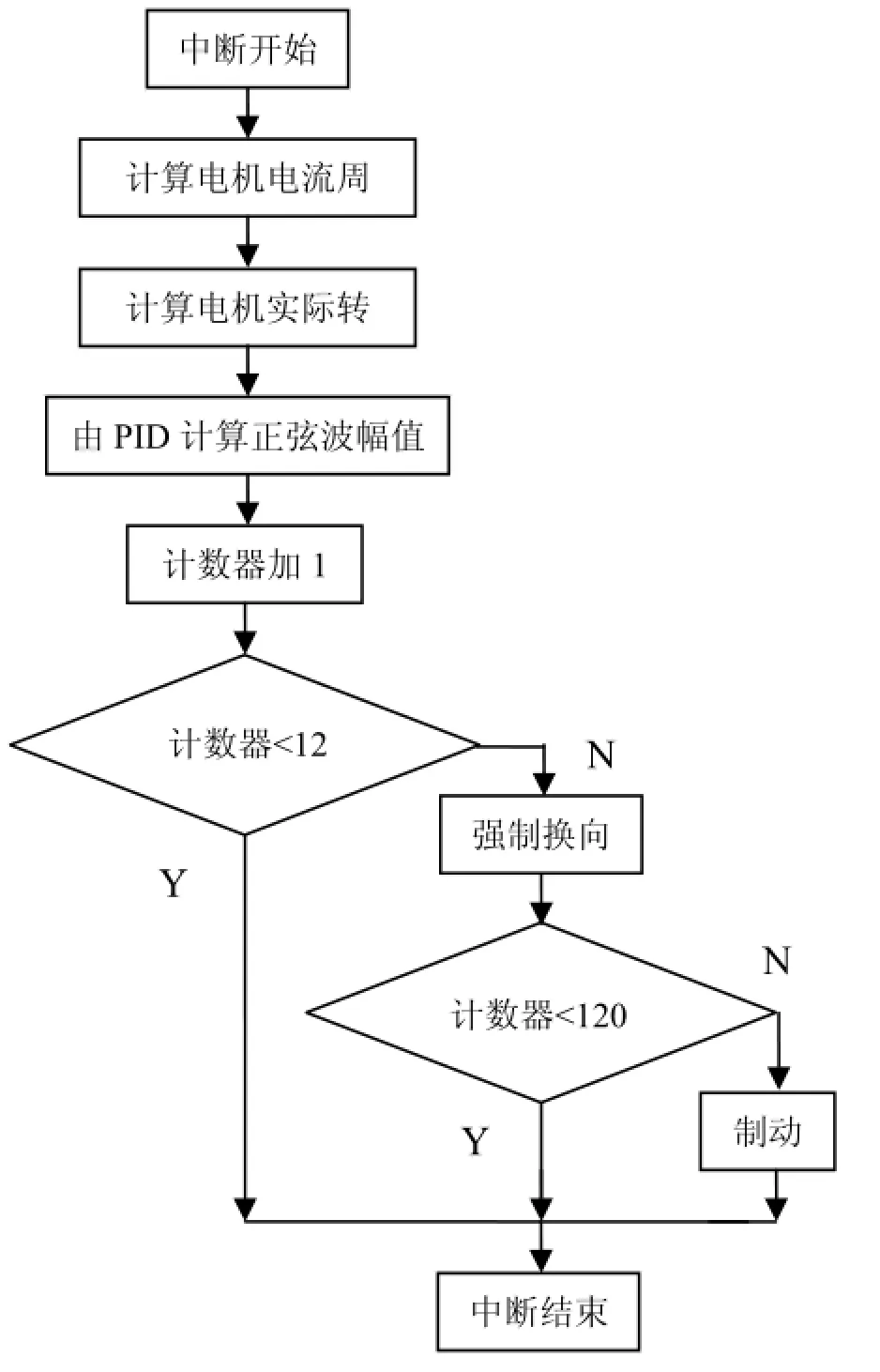
图5 T1中断子程序流程图
2)确定当前PWM周期内,转子相位角的增量角.
3)通过转速PID控制算法命令SpeedPIDControl( ),确定正弦波向量的幅值.
此外,在T1中断程序,还利用变量motorstalledcounter 作计数器(此计数器在IC1,IC2和IC7捕获中断中,将其值清零),如果其值大于12(即达到12ms),代表电机的速度过慢,电机则需要执行强制换向命令ForceCommutation();如果其值大于120(即达到120ms),则表明电机遇到了堵转,需马上执行停机命令StopMotor(),实现电机的堵转保护.在T1中断子程序中,电机转速计算过程说明如下:
根据已知条件,系统时钟设定为20M;捕捉模式设置为每个上升沿和下降沿都开始捕捉;捕捉定时器时基采用定时器T3;且进行64分频,设每个相邻跳变的时间间隔为tΔ,电机极对数p=3,电机相电流频率为f,则电机转速(r/min)表达式可推导为:

4 实验结果
本文对电机控制器进行了相关实验,电机控制器样机实物如图6所示,控制对象——无刷电机的相关参数如下:
电机功率:3kW;供电电源:蓄电池;供电电压:72V;电机接法:星型接法;额定/峰值扭矩:11.46/52N*M.
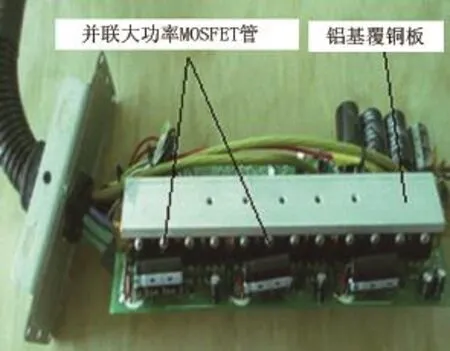
图6 电动车控制器实物图
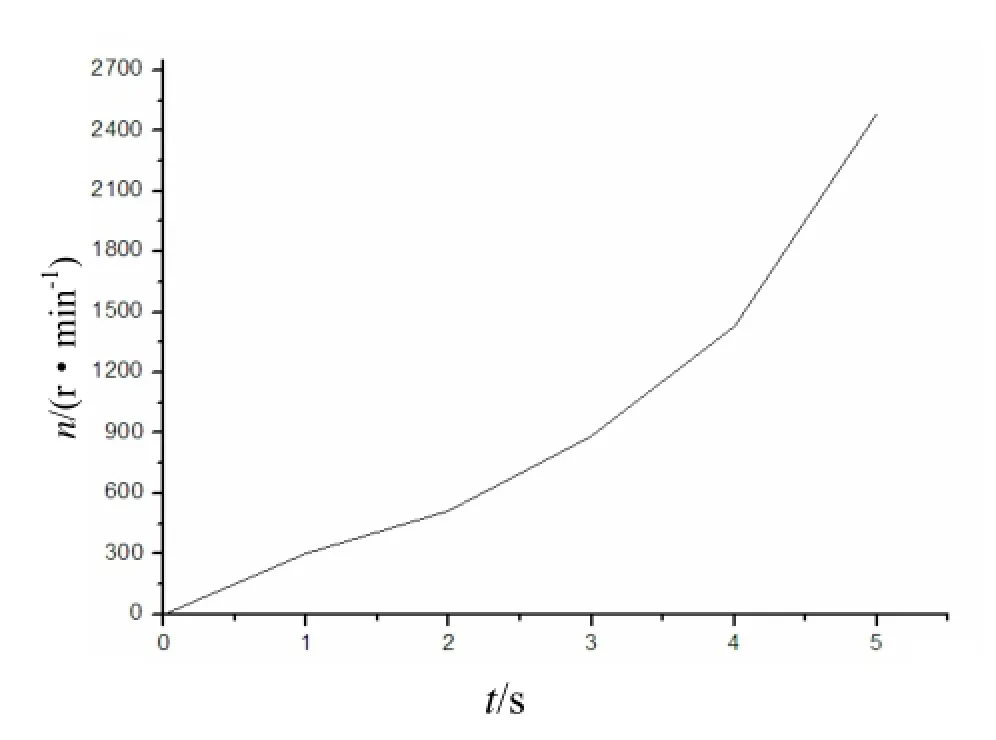
图7 电机实测加速曲线
电机带额定负载实测启动加速曲线如图7所示.经测试,电机控制器运行时,可使电机达到一个较高的调速范围,调速范围151~2498 r/min;控制器通过SVPWM+PID控制算法的调节作用,能使电机转速误差控制到6r/min范围之内,在稳定性、启动性能等方面均达到了预期效果,在同类驱动器产品中,具有较强的价格优势和竞争力.
[1]邱建琪,沈涔徽,林瑞光.永磁无刷直流电机转矩脉动抑制的SVPWM控制[J].中小型电机,2003,30(2):27-33.
[2]尚重阳,普清明,付骞.基于DSPIC30F6010的BLDCM正弦波电流驱动实现[J].微电机,2009,42(2):48-53.
[3]高春侠,张磊,张加胜.一种新型电压空间矢量PWM控制技术研究[J].节能技术,2008,26(147):45-49.
[4]杨克涛,傅仁利.绝缘金属铝基板的制备及介电性能研究[J].山东陶瓷,2006,29(6):3-6.
Design of Electric Vehicle Drive Controller
HE Yuejun
(School of Mechanical and Electrical Engineering, Shenzhen Polytechnic, Shenzhen, Guangdong 518055, China)
The paper introduces a design scheme of a motor drive controller, which is applied to the power in the range of 1-5kW BLDC. It is suitable for driving control of medium-sized electric vehicles. Compared with traditional drive controller of dc motor or asynchronous motor, the drive controller of BLDC features high energy density, long service life, wide speed range and low maintenance cost. By adopting SVPWM strategy, it not only retains the advantages of good dynamic performance, low torque ripple of synchronous motor vector control, but also eliminates the rotor encoder, making it simpler, more reliable and cost-effective. The controller adopts the Microchip Company’s DSPIC33FJ32MC204 chip as the control core, uses high power MOSFET as switch and split vertical drive circuit, taking on precaution functions against interlock, overcurrent, overvoltage, undervoltage and overheating of signal hardware.
electric vehicle; brushless DC motor; drive; control system; SVPWM
TM921
A
1672-0318(2014)01-0011-05
2013-09-04
*项目来源:深圳职业技术学院校重点科研资助项目(编号2210K3020010)
何跃军(1970-),男,湖南长沙人,副教授,主要研究方向:电气传动与电力电子技术.
猜你喜欢
四川工商学院学术新视野(2021年2期)2021-11-02
电子制作(2019年7期)2019-04-25
电子制作(2017年19期)2017-02-02
电子制作(2016年11期)2016-11-07
水电站机电技术(2016年1期)2016-02-28
中国科技纵横(2015年2期)2015-11-05
湖州师范学院学报(2015年4期)2015-03-11
科学中国人(2014年16期)2014-11-20
电测与仪表(2014年16期)2014-04-22
中国新技术新产品(2014年3期)2014-03-24
