
基于物联网的景区观光车跟踪与管理系统设计
2014-01-15 09:34赵志科
湖北工业大学学报 2014年5期
关 明,赵志科
(1长江大学机械工程学院,湖北 荆州434023;2中国矿业大学机电工程学院,江苏 徐州221116)
一些景区为了方便游客游览,引入了免费景区观光车租借系统。但是部分游客往往随意就近停车,导致观光车无法正常入库,给工作人员带来额外的工作量。RFID是一种利用电磁能量实现自动识别和数据捕获的技术,可以提供无人看管的自动监视与报告作业,而物联网就是把传感器装备到电网、铁路、桥梁、隧道、公路、建筑、供水系统、大坝、油气管道以及家用电器等各种真实物体上,通过互联网联接起来,进而运行特定的程序,达到远程控制或者实现物与物的直接通信[1-3]。因此,笔者以RFID技术及物联网为基础,设计一种基于物联网的景区观光车跟踪及管理系统,将物联网技术和观光车管理系统相结合,通过在观光车上放置RFID电子标签,景区道路两旁及各主要建筑上安置有低成本、低功耗的RFID读卡器节点,以实现景区观光车管理的智能化和无人化管理。
1 系统基本组成
本系统由智能RFID读写设备、RFID网络管理设备、网络通信设备、中心服务器组成,其系统组成示意图如图1所示。
1)智能RFID读写设备包括RFID电子标签及RFID读卡器节点。RFID电子标签贴于校园景区观光车车座底部,RFID读卡器节点均匀安放于道路两旁。
2)RFID网络管理设备为RFID网络中的簇头节点。簇头节点负责建立RFID监测网络,同时各RFID读卡器节点将监测到的景区观光车信息通过簇头节点发送出去[4-5]。
3)网络通信设备是由3G网网关设备、WLAN网关设备及路由器构成,完成各数据到中心服务器的传输。
4)中心服务器包括多台PC机,监测中心PC机上运行着相应监测软件,可以实时观测到观光车的位置信息,用户可通过手机和以太网方便地联入数据库,轻松找到观光车在景区的位置[6-7]。

图1 系统组成示意图
2 系统工作流程与设计思想
2.1 工作流程
当贴有RFID电子标签的观光车在景区里行驶时,放置在道路两旁的RFID读卡器节点可以接收到其返回的相关信息并传输给监测中心PC机,工作人员在监测中心PC机上借助相应监测软件可以实时观测到观光车的位置信息。当观光车需要归还与借用时,只需在景区观光车借还点进行个人身份的电子认证即可进行归还与借用操作,无需人工登记。并且当景区观光车没有及时归还时,工作人员借助手机接入中心服务器数据库,可以迅速找到景区观光车。
2.2 设计思想
当有观光车借出或归还时,借还点将观光车ID号及操作者的信息通过3G网网关设备或WLAN网关设备发送到监测中心PC机。当读卡器节点检测到观光车时,将自己的地址及景区观光车的ID号以及与观光车的距离发送给簇头节点。簇头节点处若没有无线局域网络覆盖,则通过3G网网关设备发送到监测中心PC机;如果有无线局域网覆盖,则通过WLAN网关设备发送到监测中心PC机。远程客户可通过以太网访问监测中心PC机,查询各景区观光车借还点观光车数量、个人借还车情况以及观光车的位置。手机客户可通过GPRS Modem访问监测中心PC机查询相关信息。具体工作过程如图2所示。
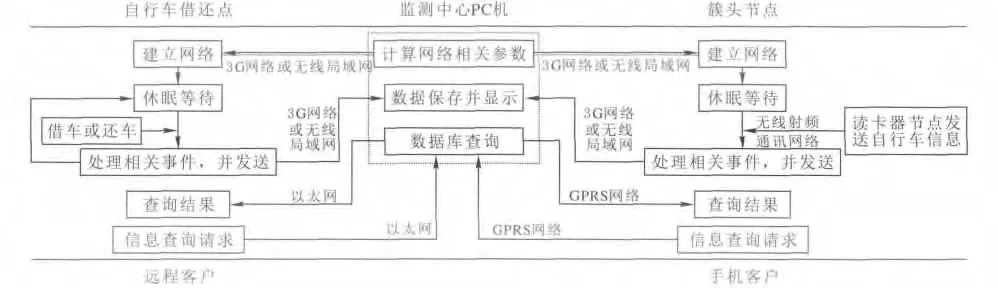
图2 工作过程框图
2.3 系统整体运行分析
1)系统开始运行时,簇头节点广播建立网络信息,各读卡器节点根据到簇头节点的距离分别加入到不同的簇;
2)簇内各读卡器节点将自己的地址信息发送给簇头节点;
3)当有观光车从景区借还点借出或归还时,借还点通过3G网网关设备或WLAN网关设备将相关借还信息发送给监测中心PC机;
4)当有观光车通过时,监测到观光车RFID标签的读卡器节点根据RSSI值计算观光车到自己的距离,然后将自己的地址、监测到的景区观光车ID和观光车到自己的距离发送给簇头节点;
5)簇头节点计算观光车的位置后通过3G网网关设备或WLAN网关设备发送到监测中心PC机;
6)远程用户和移动手机用户可通过GPRS网络或以太网访问监测中心PC机查询借还点观光车数量、观光车位置和个人借还车等信息。
景区观光车管理系统如图3所示。
3 跟踪定位的实现
3.1 定位算法
系统采用三边测量法及RSSI算法来实现对景区观光车的定位。
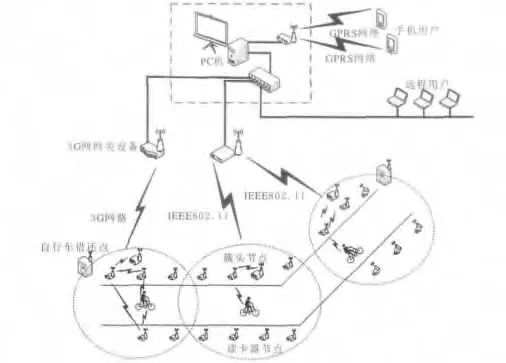
图3 景区观光车管理系统示意图
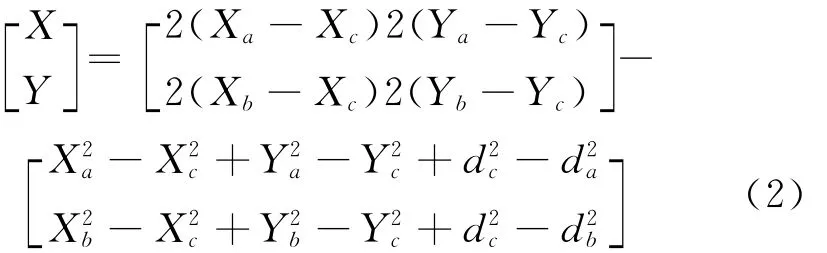
如图4所示,已知A、B、C三个节点的坐标分别为(Xa,Ya)、(Xb,Yb)、(Xc,Yc),以及它们到未知节点D的距离分别为da,db,dc,假设节点D的坐标为(X,Y),则

由式(1)可以得到节点D的坐标为
接收信号强度指示与距离存在一定的关系,通过运算模型可得出传输距离。由于无线传感器网络所在环境的复杂性,无线信号的传播会受反射、多径传播、非视距等因素的影响,因此采用对数-常态分布模型较合理。

图4 三边测量法示意图
对数-常态分布模型

式中:P(d)为信号传播距离d后的损耗,dBm;P(d0)为信号传播距离d0后的损耗,dBm;n为传播因子(常取2~5);X为遮蔽因子,是一个均值为0,方差为σ(常取4~10)的正态随机变量,dBm。
P(d0)可以通过无线电自由空间传播模型计算得来。自由空间传播模型为

式中:f是传播信号频率,MHz;d为距信源的距离,m,通常取d0=1m。
节点接收到的信号强度

式中:Ps为信号的发射功率;Pa为天线增益;P(d)为路径损耗。根据式(1)~ 式(5)可计算出D点位置。
3.2 过程分析
为了提高精度,保证路面满足三度覆盖条件,系统采用如图5所示拓扑结构。图中,S1,S2,S3为读卡器节点,S1S2=S1S3=S2S3,Ds为路面宽度,所以读卡器节点之间的间距等于通讯半径Rc=2/Ds,n-n。按Dn-n布置好读卡器节点后,人工测定各节点的位置,并储存在读卡器节点中。
根据建筑物周边观光车停放点的宽度Db,为保证其三度覆盖,与路面定位类似,如图6所示,沿建筑物周边间隔布置读卡器节点,并测定读卡器节点位置储存在节点中。
根据路面长度和建筑物的规模,每隔一定的距离布置一个簇头节点,系统开始运行后,簇头节点广播组网消息,各读卡器节点收到该广播后根据RSSI值计算到簇头节点的距离,选择最近的簇头节点加入,并将自己的坐标、到簇头的距离和地址发送给簇头节点。
当有观光车通过或停放时,检测到观光车的读卡器节点将自己的地址及监测到的景区观光车ID和景区观光车到自己的距离发送给簇头节点,簇头节点选择3个相邻读卡器节点采用三边定位法计算景区观光车的坐标,并将该坐标及景区观光车ID发送给检测中心PC机。

图5 路面定位

图6 建筑物定位
[1] 宋婉甜,李 智.一种新的无线传感网络三维定位方法[J].信息与电子工程,2012(03):257-261.
[2] 刘玉宏,于 彬.一种RSSI室内三边定位方案的设计与实现[J].计算机与现代化,2011(10):27-30.
[3] 裴忠民,李贻斌,徐 硕.大规模无线传感器网络快速定位算法[J].中国矿业大学学院,2013(02):314-319.
[4] 杨强,王中杰.大规模无线传感器网络定位算法研究[J].传感器与微系统,2007(02):33-36.
[5] 顾晶晶,陈松灿,庄 毅.基于无线传感器网络拓扑结构的物联网定位模型[J].计算机学报,2010(09):1548-1556.
[6] 任守纲,徐焕良,黎 安,等.基于RFID/GIS物联网的肉品跟踪及追溯系统设计与实现[J].农业工程学报,2010(10):229-235.
[7] 向明尚,刘兴伟.EPC物联网在车辆管理系统中的应用[J].大庆石油学院学报,2010(01):89-94.
[8] Ssu K F,Ou C H,Jiau H C.Localization with mobile anchor points in wireless sensor networks[J].Vehicu-lar Technology,IEEE Transactions on,2005,54(03):1 187-1 197.
[9] Xiong Z,Song Z Y,Scalera A,et al.Enhancing WSNBased Indoor Positioning and Tracking through RFID Technology [C]//RFID Technology (EURASIP RFID),2012Fourth International EURASIP Workshop on.IEEE,2012:107-114.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
应用能源技术(2020年11期)2021-01-26
电脑爱好者(2020年17期)2020-09-14
装备制造技术(2020年12期)2020-05-22
中国特种设备安全(2019年3期)2019-04-22
领导决策信息(2017年39期)2017-11-27
领导决策信息(2017年24期)2017-07-18
质量技术监督研究(2017年4期)2017-05-07
电子技术与软件工程(2016年24期)2017-02-23
中国公共安全(2017年11期)2017-02-06
