
民机地面滑跑建模与仿真
2014-01-15 10:00:44李正强马松辉
电子设计工程 2014年21期
王 鹏, 马 晓, 李正强,马松辉
(1.西北工业大学 无人机特种技术重点实验室,陕西 西安 710065;2.民用飞机模拟飞行国家重点实验室 上海 201210)
随着科学技术的发展,飞机正朝着更安全、更可靠、高技术方向发展,对飞机的飞行安全性能要求也越来越高。而民机地面滑跑的安全在民机的整个飞行过程中占有重要地位,通过地面运行仿真可以训练飞行员起降和地面滑跑段的应急处理能力。根据调查有50%左右的空难事故发生在飞机地面滑跑阶段[1-2],因此建立民机在这一阶段准确的模型,对进一步深入研究滑跑阶段的控制律,实现地面滑跑阶段安全起降具有重大意义。
国内外对飞机地面滑跑阶段研究比较多的是飞机正常着陆及受到外来扰动(阵风、侧风等)着陆的情况[3],对于飞机起落架故障着陆研究的较少。本文在对飞机总体进行建模的基础上,针对不同跑道环境以及飞机起落架故障下机腹触地时的运动进行了建模仿真,并对仿真时由于摩擦力建模而导致的震荡问题提出了一种解决方法,仿真结果表明系统模型合理、正确,为飞机在各种情况下起飞和着陆的控制律设计及仿真奠定了基础,提高了飞行员应对地面滑跑段故障情况的应急处理能力,加强了民机的安全性。
1 飞机总体建模
1.1 数学模型
本文假设飞机为六自由度刚体,采用前三点式起落架。则飞机的动力学模型如下式所示:

式中,m为民机的质量,V为民机质心的速度向量,L为动量矩,ΣF表示合力,ΣM表示合力矩。其中,

其中,FA和MA为飞机所受的气动力和力矩,具体计算参见文献[4],G为重力,T和MT分别为发动机推力及其产生的力矩,FG和MG分别为地面作用力及其力矩,其中飞机地面运行时主要受地面作用,即FG和MG影响,所以下文着重对其进行建模。
1.2 模型实现
根据式(1)、(2),在 Simulink 中建立飞机总体的非线性模型,如图1所示。
2 地面作用力建模
飞机在地面运行时起落架与地面直接接触,地面作用力通过起落架作用在飞机上,所以地面作用力中一个重要环节是建立起落架模型。
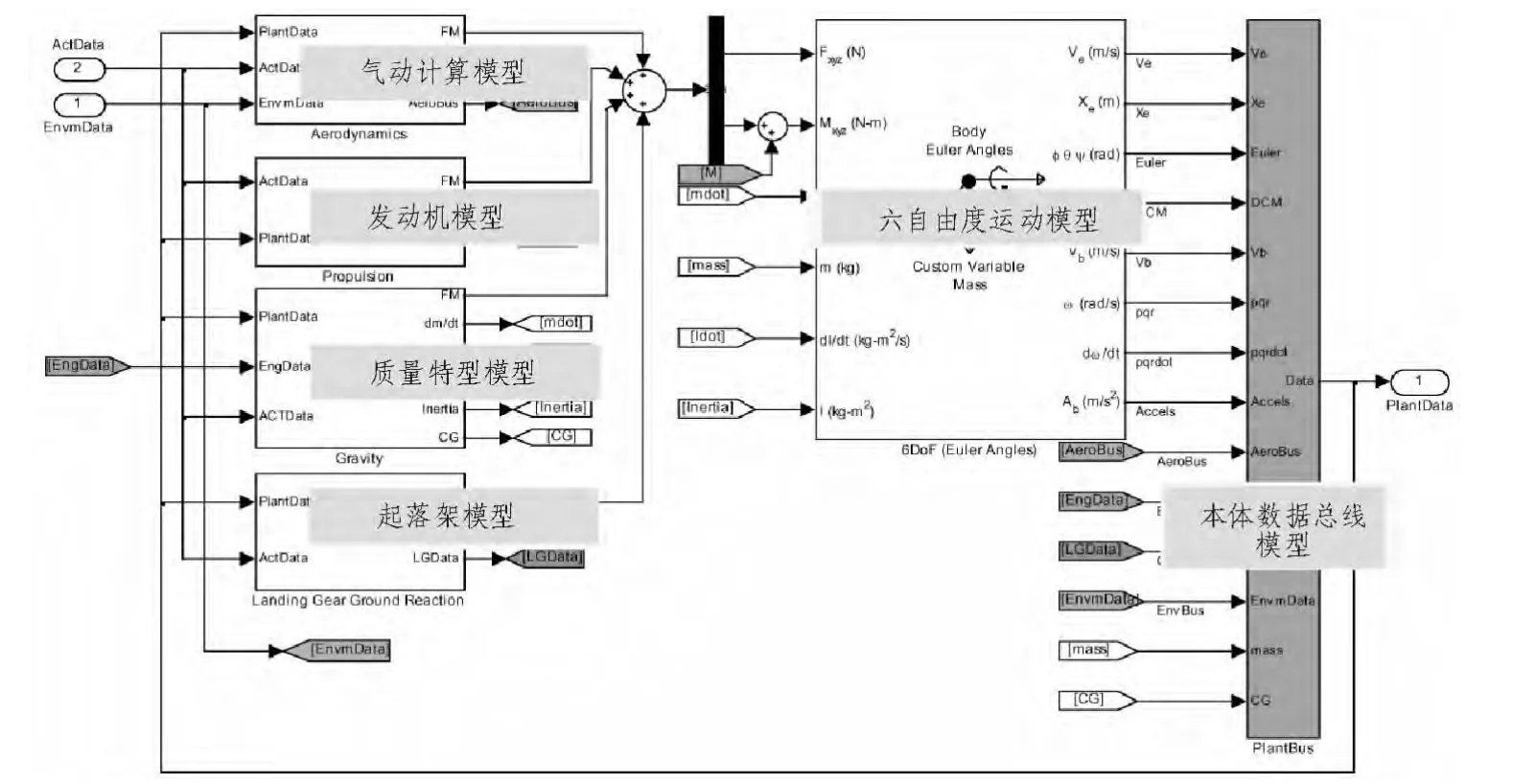
图1 飞机总体Simulink模型Fig.1 Simulink model of aircraft
2.1 起落架模型
按照前三点式布局,起落架分为前起落架和左/右主起落架,其对机体的作用力和力矩可以表示成如下形式:

上式中,下标N表示前起落架的作用力和力矩,L和R分别表示左、右主起落架的力和力矩。其中,力矩可以按下式计算,

上式中L*表示三个起落架安装点在机体坐标系中的坐标。
本文按照起落架的物理结构将其分成轮胎和支柱两部分进行建模,以左主起落架为例,轮胎作用力如下式所示:

其中,FS,Flon,Flat和 Fb分别表示地面支撑力、纵向、侧向摩擦力和刹车力,对于前起落架,去除刹车压力即可。
纵向和侧向摩擦力计算如下:

上式中,Kβ为侧偏刚度系数,β为侧偏角,μN为纵向摩擦系数,侧偏角以及侧偏刚度系数的具体计算参见文献[5-7]。
支柱作用力可以用一弹性阻尼系统表示,如下式所示:

其中Fstrut为支柱载荷,KS、CS分别表示减震支柱的刚度系数和阻尼系数,S为支柱的压缩量。
支柱和轮胎之间的作用可以考虑为起落架系统内力,所以Fstrut和FS大小相等。
由式(3)~(7)在Simulink下建立起落架模型,如图2所示。
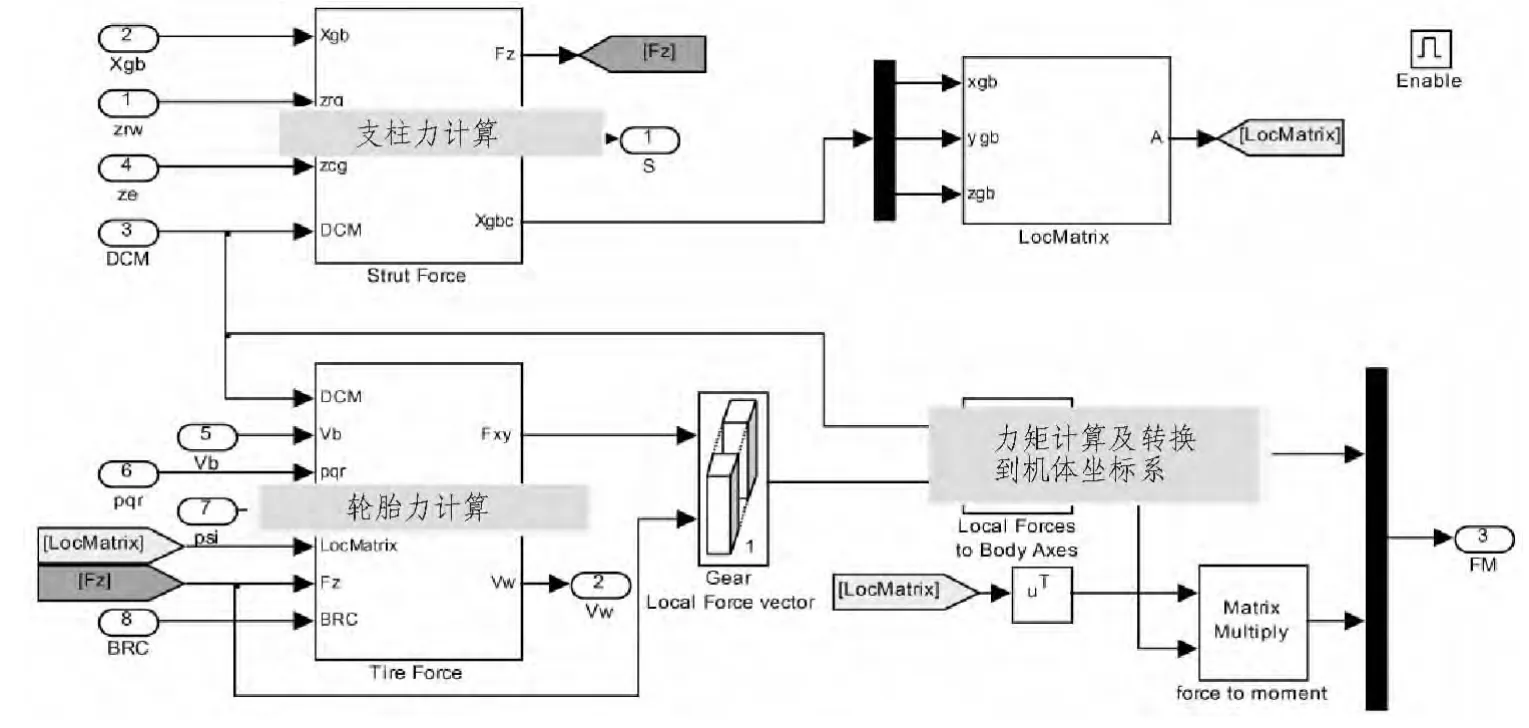
图2 起落架Simulink模型Fig.2 Simulink model of landing gear
2.2 故障模型
在起落架故障中,本文主要考虑最常出现的起落架未放下的故障。若起落架未放下,会出现机体某部分触地的情况。例如,前起落架未放下时会机头触地,单个主起落架未放下时会出现翼尖触地,3个起落架均未放下时会出现机腹触地。所以,该故障下模型主要考虑触地点和地面的作用力建模。
与起落架支柱建模类似,触地点的作用力也可以用一个弹性阻尼系统表示,见式(7)。不同的是由于机体的刚度要比支柱弹簧大的多,所以其弹性系数和阻尼系数要比支柱大很多,这两个系数与机体材料紧密相关,可以通过实验的方法得出。
触地点力矩与起落架类似,可以用式(4)计算,将其中的F*和L*用触地点的作用力和坐标代入即可。
3 数字仿真
建立模型后,进行数字仿真以验证的正确性,式(1)~(7)给出了飞机地面运行的连续模型,在计算机中进行数字仿真会将连续模型离散化,其中可能出现一些连续系统不会出现的问题,例如本文发现在Simulink中按照式(1)~(7)实现的模型在仿真时在飞机运动到停止过渡过程中会速度会出现震荡而无法停止的问题,下面将对该问题进行分析并给出解决方法。
3.1 数字仿真中的震荡问题
在运动到停止过渡过程中的震荡现象在文献[5]中已经发现,并提出了一种减小震荡的方法,使得仿真结果与实际的更为接近,本文在文献[5]的基础上提出一种改进方法,可以消除震荡,下面对震荡产生的原因以及本文的解决方法进行介绍。
本文作者认为,震荡主要是因为数字仿真为离散系统仿真,无法精确模拟到机体速度过零的时刻,例如在仿真周期[Tk,Tk+1]开始时,机体速度为 V(Tk)=Vk,加速度为 a(Tk)=ak,则在下一个仿真周期开始时,有:

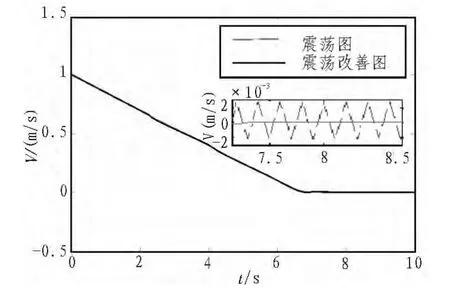
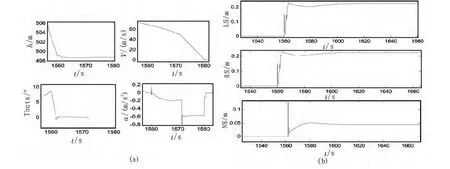
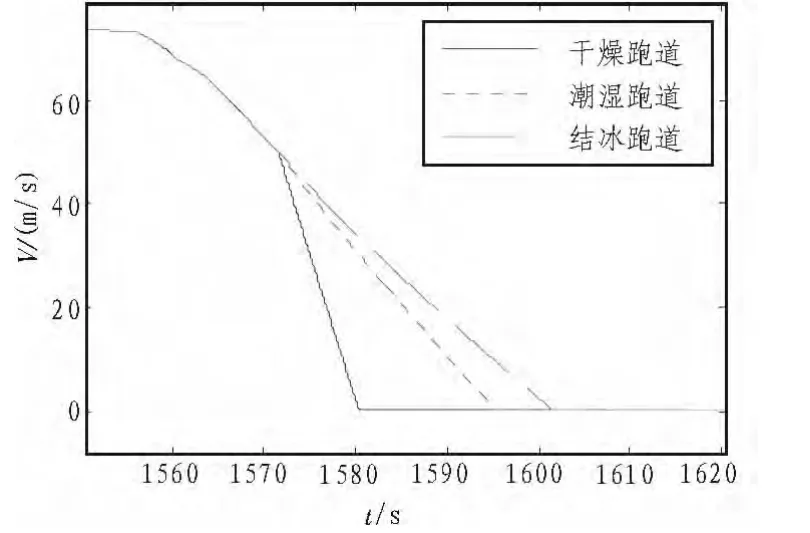
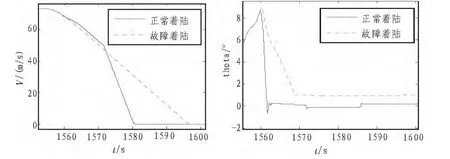
若 0 文献[5]通过在速度符号改变时加入一个阻尼相来减小震荡,但采用通过加入阻尼项的方法无法消除震荡。本文采用不同的方法,在检测到速度即将变号时,将对应的加速度逐渐减小,使得下一个仿真周期速度减小但不会变号,采用的方法可以用下式表示: 采用本文提出的方法,与文献[5]相同,采用物块滑动模型进行仿真,获得仿真结果如图3所示。 图3 震荡消除仿真结果Fig.3 Simulation result of anti-oscillation 从图3可以看出本文提出的方法可以很好的解决数字仿真中的震荡问题。 采用本文建立的模型,在Simulink下进行数字仿真,分别对正常状态下、不同跑道环境下和起落架故障状况下民机地面滑跑进行仿真。 1)飞机正常状态下仿真结果: 图4 正常状态下仿真结果Fig.4 Simulation result of normal situation 从图4(a)中可以看出,飞机的下滑着陆运动轨迹平滑,在触地瞬间有点震荡,较为真切地模仿了实际的着陆过程。飞机在1 560 s左右触地滑跑,未开启刹车系统前飞机减速较慢,1 570 s开启刹车系统,飞机速度迅速减小,直到飞机停止。飞机在落地瞬间主起落架先触地,俯仰角迅速减小,之后前起落架触地,随后飞机在地面滑跑俯仰角逐渐稳定,当飞机停止时俯仰角稳定在0.17°左右,为飞机最终的停机角。加速度在着陆滑跑阶段受到摩擦力和反推力的作用,在1 570 s左右开启刹车系统,减速明显,飞机停止时飞机所受合外力为零,加速度跳变为零。起落架的压缩变化过程如图4(b)所示,同样反映了接地滑跑阶段的变化过程。主起落架接地后迅速产生一个压缩量,之后前轮接地,由于主轮先接地会产生一个较大的低头力矩,使得前轮不仅要承担民机本身向下的冲击,同时还要受到民机低头运动带来的冲击,使得前轮在低头瞬间受到得冲击较强。从图中可以观察出前轮压缩量有一个较大冲击,之后产生一个小幅的回弹;随着速度和升力的减小,主起落架的压缩量不断增加;当飞机停止后,会产生一个抬头动作,反应在起落架压缩量上是主起落架压缩量有所增加,前起落架压缩量突然有所减小。 2)飞机在不同跑道情况下仿真结果: 图5 飞机在不同环境下减速曲线Fig.5 Aircraft velocity with different environment 图5 中不同跑道的摩擦系数见文献[8],从图中可以看出在干燥环境下飞机所受摩擦力较大,速度减小较快;湿跑道、结冰跑道所受摩擦力较小,减速减小较慢,湿跑道与干燥跑道相比飞机减速延长了大约15 s才停止,飞机在结冰跑道减速更慢。由此说明摩擦力计算模块可以较好地模拟地面环境,可以开展不同跑道环境下的地面运行仿真便与设计飞机在不同的跑道环境下的控制律保障飞机着陆的安全性。 3)起落架故障仿真结果: 由于不同故障下的建模有类似性,所以本文只给出所有起落架均未放下时的机腹触地仿真结果,如下图所示。 从仿真结果图6可以看出,由于机腹触地过程中起落架完全未放下,刹车系统不能作用,飞机速度减缓比正常着陆时慢。飞机着陆后机腹后点先触地,俯仰角增大,之后机身前点触地,俯仰角减小,随后两点同时触地滑行,直到飞机停下时俯仰角稳定在1°左右,比正常着陆时停机角要大 图6 机腹触地运动曲线图(速度、俯仰角)Fig.6 Aircraft movement of all landing gears are not down 本文以某大型民机为研究对象,分析了飞机在滑跑着陆过程中的受力情况,建立了飞机在着陆过程中地面滑跑的非线性数学模型。完成了飞机地面正常着陆滑跑与起落架完全未能放下时机腹触地时飞机滑跑的建模,并在Matlab/Simulink环境下进行仿真,并对仿真中出现的速度震荡问题提出了解决方法,仿真结果真切的模仿了飞机的实际着陆过程,验证了本文研究结果的正确性,这对进一步深入研究飞机故障着陆滑跑的控制律奠定了基础,提高了飞机的安全性。 [1]聂宏,魏小辉.大型民用飞机起落架关键技术[J].南京航空航天大学学报,2008,40(4):427-432.NIE Hong,WEI Xiao-hui.Key technologies for landing gear of large civil aircrafts[J].Journal of Nanjing University of Aeronautics& Astronautics,2008,40(4):427-432. [2]杨春生.1980—1996年世界重大进近着陆事故分析[J].中国民用航空,1999.15(2):16-18.YANG Chun-sheng.The world’s major approach and landing accident analysis 1980-1996[J].Chinese civil Aviation,1999,15(2):16-18. [3]胡浩.无人机进场着陆/地面滑跑控制与仿真[D].电子科技大学,2011. [4]段松云.无人机起飞/着陆阶段建模和飞行动力学仿真系统设计[D].清华大学,2004. [5]马松辉,吴成富,王鹏.基于Simulink的无人机空中地面一体化建模方法研究[J].系统仿真学报,2011,23(4):838-842.MA Song-hui,WU Cheng-fu,WANG Peng.Research of UAV integrative in air-on ground modeling based on simulink[J].Journal of System Simulation,2011,23(4):838-842. [6]Bearspual M.A Review of Flight Simulation Techniques[J].Progessin the Aerospace Sciences (S0376-0421),1990,27(1):1-120. [7]Carl Banks.A discussion of methods of real-time airplane flight simulaton[D].The Pennsylvania State University Graduate School College of Engineering,2005. [8]吴在桂.飞翼布局飞行器飞行控制关键技术研究[D].南京航空航天大学,2010.
3.2 仿真结果及其分析
4 结 论
猜你喜欢
船海工程(2023年2期)2023-04-27 13:07:20
青年文摘(2022年13期)2022-12-07 15:23:57
百科探秘·航空航天(2020年8期)2020-07-29 09:06:03
军民两用技术与产品(2019年12期)2020-01-19 05:13:00
民用飞机设计与研究(2019年2期)2019-08-05 01:33:32
电子测试(2018年18期)2018-11-14 02:30:20
纤维复合材料(2018年3期)2018-04-25 07:22:58
体育时空·上半月(2017年4期)2017-05-05 03:08:39
东西南北(2017年1期)2017-02-22 18:26:24
民用飞机设计与研究(2015年3期)2015-12-07 12:09:45
