
伺服传动系统的电磁干扰及抑制策略探析
2014-01-13 10:05张霞
微特电机 2014年8期
张 霞
(成都师范学院,成都611130)
1 伺服传动系统电磁兼容性设计概述
电磁兼容作为一门学科,以电磁场、电磁波理论、电路理论和信号分析为基础,引起了人们的广泛研究。随着电力电子的飞速发展,机电型的伺服系统成为主要形式,装备中伺服系统的大功率、大负载及高响应性的要求,使得系统的电磁兼容问题较为突出,这成为制约伺服传动系统正常运行的因素[1]。
本文涉及的伺服传动系统具有大功率、大负载和频繁高速起动的特点,该系统除工作在原有电磁场环境的同时,自身运行时也会产生电磁干扰。伺服系统在正常运行时需不影响原设计的控制意图,同时系统自身产生的电磁噪声所造成的电磁波干扰必须限制在一定的电平,不致对周围的电磁场环境造成严重污染和影响控制信号传输及各频段电磁波信号的接收和发射。基于上述因素的考虑,伺服系统要求具有良好的电磁兼容性(EMC)[2]。
在上述电磁兼容理论分析基础上,本文结合设备生产研制过程中,某型伺服传动系统因产生大量电磁干扰导致无法正常工作的现象进行了分析,并对屏蔽外部电磁干扰的措施进行了论述。
2 伺服传动系统电磁干扰问题分析
伺服传动系统是集伺服系统控制、伺服精度分析、伺服机械结构设计、精密机构运动学和动力学建模等技术与一体的,以伺服机械结构和伺服控制有机结合的产物[3-4]。本文以参与调试的某型伺服传动系统出现的电磁干扰为例,对干扰现象及抗干扰策略进行了分析。
2.1 伺服传动系统的组成
本传动系统主要分为伺服传动系统和伺服控制系统。
伺服传动系统如图1 所示,传动系统主要包括方位和俯仰传动装置两部分,依次带动方位减速器、方位小齿轮、盘式轴承,从而带动转盘及俯仰部分作方位转动;俯仰电机带动俯仰减速器及其轴上的天线作俯仰转动。由于方位和俯仰都是在有限范围内转动,因而方位、俯仰均设置机械限位和电限位装置,作为安全保护。编码器通过两级传动检测方位轴的运动情况。俯仰码盘直接装于俯仰轴上,与俯仰轴同步运动。

伺服控制分机接收主控系统的命令,实现对传动系统的运动控制,并实时上报分机状态。图2 为伺服控制系统组成原理图,伺服控制系统接收编码器计数信息,经过运算处理得到误差信号,将它换算成控制电机转速的模拟电压信号,驱动器根据电压信号的大小计算出PWM 驱动电压的占空比,输出驱动电压到电机绕组,完成对电机的闭环调速,实现天线转台转动,达到控制传动座的目的。

2.2 伺服传动系统干扰现象分析
电磁干扰问题是工程项目中较为棘手复杂的问题之一,不确定性因素很多。对某伺服传动系统进行联调过程中,出现如下两种不正常现象:通过主控系统发送命令,转台无法正常转动;发送主控命令后,转台转动较小的角度后停止,并出现编码器报警现象。本文采用实验对比法,伺服电动机处于制动状态下,通过电机驱动器控制软件对电机转台进行观察。图3 为静态下编码器输出的峰值为1 V 的正余弦电压信号,浅色线代表正弦信号,较深线代表余弦信号。由图可知信号的幅度信息产生非常多的毛刺,并且毛刺峰值很大,与正常值间的差异达到2 500 编码器输出值(对应电压0.05 V),传感器模块无法计算电机当前转速,伺服传动系统存在严重的电磁干扰问题,造成该设备无法正常运行。

3 电磁干扰问题抑制策略
电磁干扰的产生无法避免,但在设计及调试过程中可通过采取相关技术措施对电磁干扰进行抑制,以达到消除或减小对伺服传动系统正常工作的目的。
3.1 抑制干扰主要技术措施
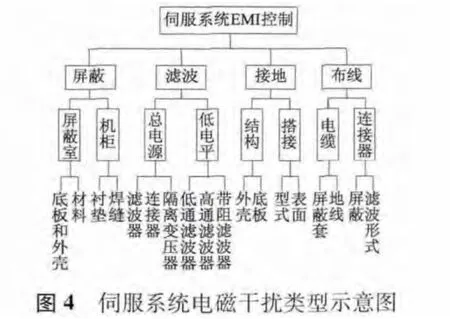
如图4 所示,抗电磁干扰的三大技术是屏蔽、接地、滤波[5]。下面主要从这三方面分别来讨论电磁干扰的抑制技术。
1)屏蔽。电磁屏蔽室电磁兼容技术一项重要措施,主要是利用屏蔽材料将干扰源封闭以阻止或减小电磁能量传输。本伺服传动系统中关键的电源信号和控制信号多采用防波套、双脚屏蔽线等屏蔽措施进行屏蔽处理。
2)接地。采取接地措施,在屏蔽体与干扰源间建立良好的电气连接,可对高频干扰信号形成低阻通路,抑制高频干扰产生。根据实际情况可采取单端接地或双端接地等措施。
3)滤波。EMI 滤波器经常在阻抗失配状态下运行,为了保证具有良好的滤波特性,通常通过抑制噪声源能量,切断耦合的途径,提高电磁干扰能力。
3.2 伺服传动系统干扰抑制
针对转台系统的传导干扰,着重分析了电缆辐射和机箱辐射对伺服传动系统的影响,并采用基于实验的“插入损耗法”计算噪声的阻抗信息[6-7]。如图5 所示,主要工作有:采用电缆屏蔽层采取多点接地的方式、差分信号采用屏蔽双绞线处理、关键信号缠绕防波套处理等;改善伺服控制机驱动分机接地环境,加强对机箱干扰的屏蔽;改善编码器端信号地线环境。

通过上述对转台系统的辐射干扰的简要分析,排除了传动系统的接大地问题以及关键信号线和电源线的屏蔽问题,并最终确定编码器输出的差分信号(正弦/余弦信号)电磁干扰非常大是因为该插座的内部信号地引脚接地存在问题,将该引脚与防波套端接后,差分信号幅度差值非常小(约500/10 mV),图6 为电机不工作时静态正弦电压信号(1 V峰值),正弦电压信号的幅值强度可以作为反馈,实现伺服系统的闭环控制。表明外围干扰不足影响转台正常运转。经试验验证,在主控命令控制下,转台可正常运转,电磁干扰得到了抑制。

3.3 电磁干扰抑制效果的验证
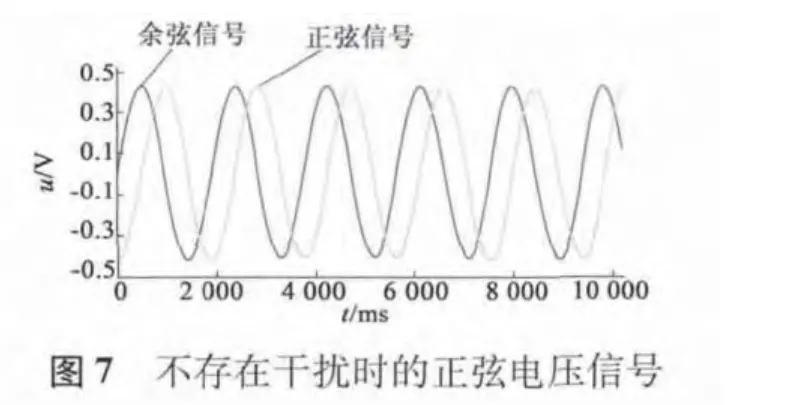
通过实验对比法查找出电磁干扰现象存在问题并采取措施后,伺服系统可正常工作,图7 为电机在动态(低速运转)下,电机驱动器软件采集的编码器幅度波形。正常情况下,伺服系统的传感器采集模块可识别的电压为0. 5 V(对应编码器输出值为25 000),图中采集波形幅值约为0.4 V(对编码器输出值为20 000),满足传感器模块能够识别的边界值,说明伺服反馈装置处于正常工作状态,干扰抑制有效,系统能够正常工作。
4 结 语
本文通过对调试过程中伺服传动系统产生的电磁干扰因素的分析,提出了相应的抑制措施,主要包括对驱动电缆的屏蔽层接地方式的改善以及加强对机箱的屏蔽处理,提高了屏蔽效能。为了考察抑制措施的有效性,本文分别在静态(电机处于制动状态)和动态(正常运行)下对伺服反馈系统的测量参数进行的分析,并通过对转台干扰抑制的实际效果,验证该伺服传动系统干扰抑制策略的有效性。
[1] 康永泰,齐蓉,袁国珍.单轴稳定平台控制系统及其电磁干扰防护[J].微特电机,2012,40(7):62-65.
[2] 夏福梯.防空导弹制导雷达伺服系统[M].北京:宇航出版社,1996:177-200.
[3] 刘尚合.武器装备的电磁环境效应及其发展趋势[J]. 装备指挥技术学院学报,2005,(1):55-68.
[4] 秦继荣.现代直流伺服控制技术及其系统设计[M]. 北京:机械工业出版社,1993:68-70.
[5] 岳红伟.电动转台系统电磁干扰抑制方法研究[D]. 哈尔滨:哈尔滨工业大学,2006:22-25.
[6] 柳光福.不当接地引发的电磁干扰[J]. 电磁干扰抑制技术,2007,(5):61-63.
[7] 陈穷,蒋全兴,柳光福,等. 电磁兼容性工程设计手册[M]. 北京:国防工业出版社,1993:35-38.
猜你喜欢
中国造纸(2022年8期)2022-11-24
北京航空航天大学学报(2022年6期)2022-07-02
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
幼儿园(2021年12期)2021-11-06
电子制作(2018年10期)2018-08-04
制造技术与机床(2017年3期)2017-06-23
中国修辞(2016年0期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
