
基于时空信息融合的复合引信目标识别方法
2014-01-13 01:53焦朋勃黄长强丁达理
探测与控制学报 2014年5期
焦朋勃,黄长强,蔡 佳,丁达理,王 征
(空军工程大学航空航天工程学院,陕西 西安710038)
0 引言
引信是整个武器系统目标识别中的最后一个环节,为了保证己方和友军目标的安全,必须提高引信的目标识别能力,做到非敌方目标不起爆;现代战争遇到的多目标拦截问题,也要求引信具有从多个目标中识别特定目标的功能,以保证导弹掠过非攻击目标时不提前作用[1]。同时,战场环境日趋复杂,各种干扰源的存在容易使引信形成虚假目标,导致误判,提前起爆。单一传感器的引信系统已经不能满足作战的要求,取而代之的将是以多传感器为基础的复合引信。采用多传感器的复合引信可以使每个传感器发挥各自的探测优势[2],在复杂的战场环境下获取更多的目标信息,从而为引信起爆战斗部提供可靠的信号。红外、激光和毫米波是目前应用最广泛的三类传感器,三者对目标的探测各有特点,获得的目标识别信息可靠性不同,所以有必要将结果进行融合,以期获得较精确的识别结果[3]。目前对于多模复合引信目标识别方法,大多文献只作笼统的介绍,具体的方法并不多见。针对此问题,本文在红外、激光和毫米波探测器三类传感器组成的复合引信的基础上,利用D-S证据理论在不确定性推理方面的优势进行信息融合,利用神经网络强大的非线性处理能力和自学习功能构造基本概率赋值[4],将D-S证据理论和人工神经网络相结合,并提出了基于时空信息融合的复合引信目标识别方法。
1 D-S证据理论
基于证据分析,确定相信一个命题为真的方法,称为证据理论[5]。D-S 证据是进行决策融合的一种行之有效的算法,该算法在一定程度上可以有效解决证据冲突,且计算量小,工程容易实现。
定义1 设θ为辨识框架,如果集函数m:2θ→[0,1](2θ为θ 的幂集,是θ所有子集的集合)满足:
此时称m 为框架θ 上的基本概率赋值。于是由:

所定义的函数Bel:2θ→[0,1]为θ上的信任函数,即表示对A 的总信任。在多传感器复合引信中就表示每个传感器各自对目标的类型信任的程度。
定义

为似然函数,表示不否定A的信任度,即所有与A相交的集合的基本概率赋值。信任区间(Bel(A),PL(A))描述了A 的不确定性。证据理论最大的特点就是在区分不知道与不确定信息方面显示出很大的灵活性。
定义2 设Bel1和Bel2分别是同一识别框架θ上的两个信任函数,m1和m2分别是其对应的基本概率赋值,若A ⊆θ且m(A)>0,则称A 为焦元,焦元分别为:A1,…,Ak和B1,…Br,设:

则:

由定义2给出的证据组合规则称为Dempster组合规则。对于多个证据的组合,也可采用该规则对证据进行两两组合。
定义3:设存在A1,A2⊂θ,满足

若有:
则A1为判决结果,其中ε1,ε2为预先设定的阀值。
2 利用BP神经网络获取基本概率赋值
将D-S证据理论用于目标识别时,其基本概率赋值(BPA)的获取是个难点,基本概率赋值的好坏直接关系到最后的决策和识别结果[6]。由于神经网络具有它独特的优点,特别是其具有表达模糊信息的能力,这些很符合D-S证据理论的方法对证据的要求。如图1所示(以红外传感器为例)。
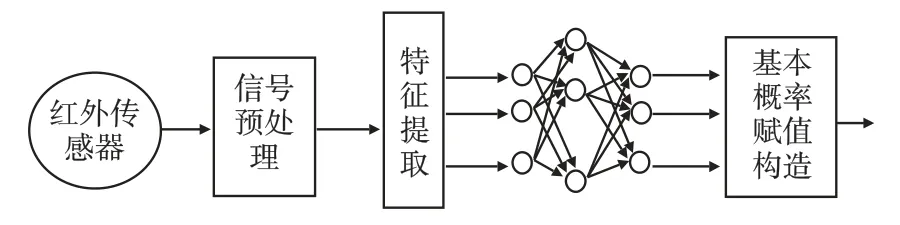
图1 利用BP神经网络获取基本概率赋值Fig.1 Obtain the BPA based on BP neural network
红外传感器探测到的数据经过预处理,如滤波、采样保持等,然后进行特征提取,从信号中提取最能代表或区分目标类型的本质的、固有的特征,进行量测并将结果数字化,形成特征矢量,从而产生代表目标的模式。把目标特征向量作为输入,经过BP神经网络的运算,得到该证据对各个待识目标的基本概率赋值函数。此方法避免了构造基本概率赋值的复杂性,同时使基本概率赋值更为合理客观。
定义辨识框架Ω= (ω1,ω2,…,ωN),设xi为神经网络第i个神经元的输出,N 为输出神经元的个数,则基本概率赋值为神经网络归一化的输出,即:

把每个神经网络的一次输出作为一条证据,得到各个证据的基本分配以后,就可以按照组合规则进行下一步的信息融合了。
只要神经网络经过大量样本的学习,利用其较强的泛化能力,就能起到领域专家的作用[6]。BP神经网络的建立和训练在文献[4]和[6]中有详细的介绍,这里不再赘述。
3 复合引信目标识别原理
3.1 时空信息融合
利用证据理论中的Dempster组合规则,既可以对不同传感器提供的目标识别证据进行空间域判决融合,也可以在多个测量周期对传感器提供的目标识别证据进行时间域融合,即多传感器多测量周期的信息融合,这种方法更能减少系统的不确定性,从而提供更为可靠的目标识别结果。
多传感器多周期的时空域信息融合有三种融合方法,即集中式融合算法、分布式无反馈融合算法和分布式有反馈融合算法。其中分布式有反馈融合算法融合效果最佳,但是计算量较大,对处理器的要求太高;分布式无反馈融合算法计算量最小,但是要求处理器个数多;集中式融合方法只需一个处理器,且在实际应用中易于编程或硬件实现,符合复合引信系统对数据处理实时性、快速性的要求。综合考虑,复合引信多传感器采用集中式时空信息融合算法,具体算法流程如图2所示。

图2 集中式时空信息融合流程Fig.2 Centralized temporal-spatial information fusion flow
集中式融合算法将所有传感器在每个周期测得的数据都送到中心处理器,然后由中心处理器将前一时刻的累积信息与传感器当前的测量值进行融合,得到最后的融合结果。
如果用Mk(A)表示第k 个测量周期后所有传感器对命题A 的累积的可信度分配,Mk-1(B)表示k-1个周期后对命题B的可信度分配,msk(Ai)为第s个传感器在k时刻的测量值,则集中式融合的结果可通过下面的式子进行计算:

其中

这里Ai⊂Θ,Bi⊂Θ,都为识别框架下的不同命题。
可以看出,若将第k-1个周期后的可信度分配看做一条证据,则在第k个周期相当于N+1个传感器进行融合。
3.2 基于时空信息融合的复合引信目标识别原理
毫米波不仅可以实现对目标的探测,还可以提取目标的更多信息,如一维距离像信息、目标航迹信息等,从而测定目标特征进行目标识别。
红外传感器利用目标产生的能量进行探测,通过获取目标的能量信息对目标进行识别。
激光传感器利用目标表面散射的激光功率而探测目标,可以通过接收的激光功率来识别目标。
随着毫米波集成电路(MMIC),红外和激光信号处理技术以及计算机技术的发展,使引信系统采用多传感器实现对目标的识别成为可能。
如图3所示,各个传感器探测到信息数据经过预处理,提取出目标特征信息,经过BP神经网络的运算,得到该证据对各个待识目标的基本概率赋值函数。然后利用时空信息融合算法和定义3的决策规则进行目标识别,识别结果送入引信执行装置,从而根据引信起爆程序控制引信起爆或不起爆战斗部。
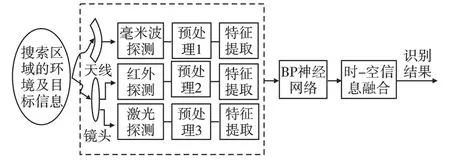
图3 复合引信目标识别原理Fig.3 Principle of the target recognition of compound fuze
4 实例分析
4.1 时空信息融合计算
假设目标识别框架θ= {A:敌机B:我机C:中立方D:不明},采用红外、毫米波雷达、激光雷达三种传感器,分别对目标进行识别。假设各个传感器探测频率同步,且数据已经经过预处理。首先,通过各个传感器探测采集目标信息,提取出目标特征向量,得到目标特征向量库;用样本集离线训练BP神经网络,这里利用Matlab提供的神经网络工具箱通过300个数据对BP神经网络进行训练;向已经训练好的神经网络输入一组F-22飞机数据,利用训练好的神经网络进行目标特征信息的融合,求出神经网络的输出;将BP神经网络输出进行归一化处理后作为一条证据,利用时空融合算法进行证据组合,产生新的信任函数值;利用Dempster证据理论决策规则,做出判断得到决策结果,完成融合过程。三个传感器通过BP神经网络得到不同周期的基本概率赋值如表1。

表1 多传感器多周期基本概率赋值Tab.1 BPA of multi-sensor and multi-period
在表1基础上,利用集中式时空信息融合算法,通过Matlab软件平台进行编程计算,结果如表2。
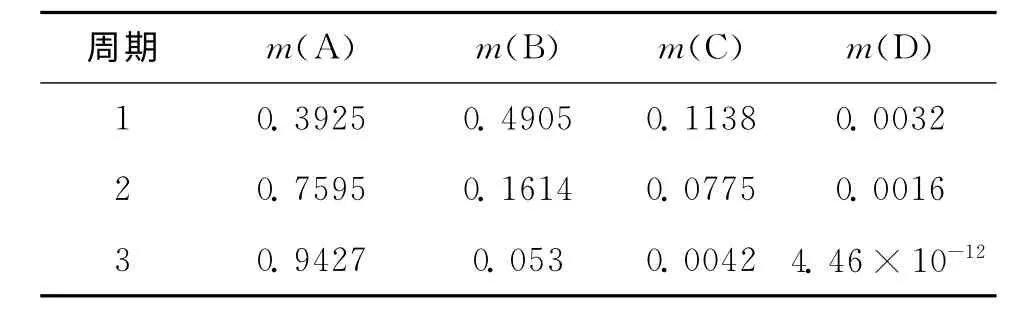
表2 集中式时空信息融合结果Tab.2 Result of centralized temporal-spatial information fusion
4.2 结果分析
从表1中可以看出,单个传感器并不能给出一个令人满意的识别结果,在不同的探测周期基本概率赋值差异较大;在相同周期内每个传感器的基本概率赋值也有较大的差异,有的甚至得出截然相反的结果。这是因为在训练神经网络时不可能穷尽所有样本,训练有一定的误差,加之战场环境下目标瞬息万变和传感器的不可靠性,单个传感器或多传感器单周期探测都不能有效地识别目标(下面的分析也能说明这个问题),所以有必要进行进一步的信息融合。
从集中式时空信息融合融合结果,即表2可以看出,在第一个周期内目标识别系统并没有得出正确的识别结果。第三个探测周期后,A 的可信度达到0.942 7,B的可信度不断下降,最终为0.053,目标的不确定度几乎降为0,这里选取阈值为0.1,最终决策结果为A,即目标识别为敌机。
通过时空信息融合的具体实现可以看出,随着测量周期的增多,目标识别的不确定度逐渐降低,确定度逐渐增大,最终为复合引信提供了正确的目标识别信号。
由于在空战过程中,导弹起爆时机转瞬即逝,所以要求复合引信多传感器信息处理能够快速完成。若不能合理选择周期或处理器计算速度达不到要求,采用时空信息融合方法有可能牺牲引信的实时性,从而导致导弹失去最佳毁伤时机。
5 结论
本文提出了复合引信的时空信息融合方法,利用D-S证据理论和神经网络,对空中目标在时空领域进行了证据组合。该方法将信息融合技术与多模复合引信结合,提高了引信对目标类型的识别率,克服了导弹在空战中受敌方干扰和其他随机因素的影响。
随着测量周期的增加,引信的正确识别率将会更高,但如果信息处理不及时,可能会使引信不能按照作战要求起爆战斗部。在后期研究和实际应用中应当根据作战要求适当选取测量周期数,周期间隔,设计信息处理电路和程序,以达到引信正确识别目标并及时、可靠起爆战斗部的目的。
[1]马宝华.现代引信的控制功能及特征[J].探测与控制学报,2008,30(1):1-5.
[2]马秋华.多传感器目标特性测量及数据融合应用[J].探测与控制学报,2007,29(4):16-20.
[3]PETRELLIS N,KOPRTAOS N,ALEXION G.Target Localization Utilizing the Success Rate in Infrared Pattern Recognition[J].IEEE Trans on Sensors Journal,2006,6(5):1355-1364.
[4]陈祥光,裴旭东.人工神经网络技术及应用[M].北京:中国电力出版社.2003.
[5]SHAFER G A.Mathematical theory of evidence[M].Princeton N J:Princeton University Press,1976.
[6]赵丹丹.多传感器数据融合在目标识别中的应用研究[D].太原:太原理工大学,2007.
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
四川党的建设(2022年8期)2022-04-28
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
小学生学习指导(低年级)(2020年11期)2020-12-14
作文大王·低年级(2018年10期)2018-12-06
计算机与生活(2018年8期)2018-08-15
中学生数理化·高一版(2017年1期)2017-04-25
小猕猴智力画刊(2016年5期)2016-05-14
