
封闭行星齿轮传动的设计研究
2014-01-08 03:38饶振刚
传动技术 2014年3期
饶振刚
南京炮兵学院
1 概 述
近二十年来,在国外已出现了一种较新颖的行星齿轮传动组合型式——封闭行星齿轮传动。该封闭行星齿轮传动技术,在工业发达国家的现代机构传动中发展得相当迅速,应用日益广泛。由于封闭行星齿轮传动具有结构紧凑,传动比更大,其体积比双级串联的行星齿轮传动更小;且具有更大的增矩性能和广阔的传动比范围。近几年来,随着我国更深和地改革开放,对外先后引进了许多先进的现代机械设备和传动技术,从而使该项先进的行星传动技术逐渐地进入了我国的机械设计领域,并引起了我国齿轮界人士的极大地关注和重视,且在我国开始了对封闭行星齿轮传动的研究和发展;目前已逐渐地获得了应用和推广。例如,在我国已研发的现代机械传动设备中,即在工程机械、起重机械、建筑机械、船舶设备和现代兵器以及航空工业中均获得了较好的应用。

图1 封闭行星齿轮传动简图Fig.1 Diagram of the inverse formula closed planetary gear transmissio
所谓封闭行星齿轮传动,就是将一个简单行星齿轮传动与一个差动行星齿轮传动进行封闭式连接所形成的一种新型的行星齿轮传动型式,如图1所示。通常,将该封闭行星齿轮传动中的差动行星齿轮传动(具有两个自由度)称为原始齿轮机械(见图1的左边);而将其中起着封闭作用的行星齿轮传动,称之为封闭齿轮机构(见图1的右边)。该封闭行星齿轮传动仅具有一个自由度;且具有一个输入轴A和一个输出轴B。
2 封闭行星齿轮传动类型
目前,较常见的封闭行星齿轮传动的类型有:反馈式组合型、功率分流式组合型和复合式组合型三种型式。图1所示的封闭行星齿轮传动是反馈式组合型,它是由一个具有两个自由度的差动齿轮传动(代号为A(x1b1)a1)与一个准行星齿轮传动(代号为)组合而成的;其传动代号为该代号的含义是:它是由两个2Z-X(A)型行星传动组合的,转臂x1输入,中心轮a1和a2(连在一起)输出,转臂x2固定。其传动特点是差动齿轮传动A1的一个输出运动(转速na1)经过准行星齿轮传动A2转换成为另一个输出运动(nb2)后,再以nb1=nb2的运动反馈给原来的差动齿轮传动A1;故称它为反馈式封闭行星齿轮传动。由于该封闭行星齿轮传动具有补偿运动的作用;因此,它可用于数控机床加工过程中来较正传动系统的误差。
图2所示的封闭行星齿轮传动也是由一个差动齿轮传动Aa1(x1b1)与一个简单的行星齿轮传动组合而成的;其传动代号为它的传动特点是输入功率PA传给差动行星传动A1后可以进行功率分流:一方面直接输出功率Pb;同时,差动齿轮传动A1又将部分功率Px1传给行星齿轮传动A2;且经其变换后的输出功率Pb与先前的输出功率Pb合在一起进行输出;其输出功率为PB。由于该封闭行星齿轮传动可以进行功率分流,故称它为功率分流式封闭行星齿轮传动。显见,也可以将功率分流式分流式的组合方式看作为运动分解式的组合方式。
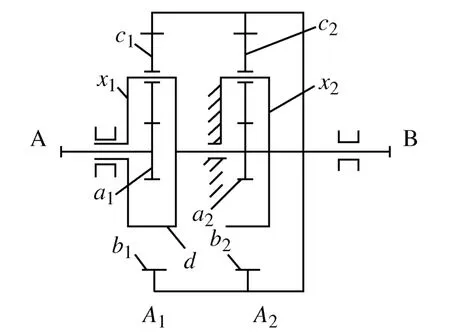
图2 功率分流式封闭行星齿轮传动简图Fig.2 Diagram of the Power Split closed planetary gear transmission
图3所示的封闭行星齿轮传动也是由一个差动行星传轮传动A1和一个简单行星齿轮传动传动A2组合成而的;其传动代号为(A1A2)b(a2a)x。它的传动121特点是:输入轴A的运动(na)一方面通过a2-a1这2条路线直接传给差动齿轮传动A1中的构件a1(其运动为na);同时,A2的输入运动(na)又通过a2-x212这条路线传给差动齿轮传动A1的构件b1,其运动nb=nx。然后,在差动行星齿轮传动A1中便将经12过上述两条路线传来的两个运动(na和nb)复合成11为输出运动nB。因此,将该封闭行星齿轮传动称为复合式封闭行星齿轮传动。
3 封闭行星齿轮传动的传动比计算公式
对于上述各种类型的封闭行星齿轮传动的传动比计算公式,本文采用了它们所对应的结构简图来进行推导;该推导方法既简便,又新颖、科学,确是一个较先进的推导方法。
对于图1和图2所示的封闭行星齿轮传动的传动简图均可以用结构简图4代表。而图3所示的复合式封闭行星齿轮传动的传动简图可以用结构图5代表。由图4和图5可见,封闭行星齿轮传动的结构简图包括两个简单行星齿轮传动A1和A2;输入轴A、输出轴B和支承件E以及起着封闭连接作用的辅助构件d。图1中的转臂x1连接输入轴A,中心轮a2连接输出轴B,固定构件x2为支承件E,内齿轮b1和b2连接起来为辅助件d。所以,传动简图1可以用结构简图4代表。图2中的中心轮a1与输入轴A连接,内齿轮b2与输出轴B连接,转臂x2为支承件E,转臂x1与中心轮a2相连接为辅助件d。传动简图2也可以用结构简图4代替。图3所示的复合式封闭行星齿轮传动,中心轮a1与a2连成一体与输入轴A连接,转臂x1与输出轴B连接,内齿轮b2为支承件E,内齿轮b1与转臂x2相连接为辅助件d。该传动简图3应该用结构简图5代替。
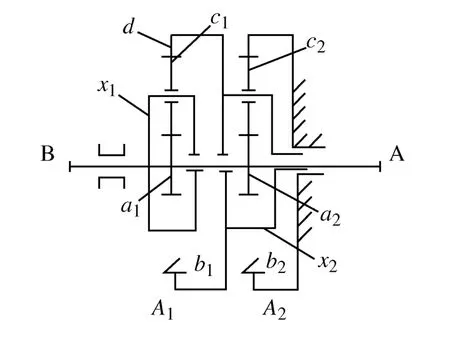
图3 复合式封闭行星齿轮传动简图Fig.3 Diagram of the Composite enclosed planetary gear transmission

图4 封闭行星齿轮传动的结构简图Fig.4 Structure of the Closed of the planetary gear

图5 复合式封闭行星齿轮传动的结构简图Fig.5 Structure of Composite enclosed planetary gear drive
在上述结构简图中,当支承件E固定时,其转速nE=0,其传动比式为

当输出轴B固定时,其传动比公式为

当输出轴A固定时,其传动比公式为

根据行星齿轮传动的普遍关系式[1],即

将(2)式代入(3)式,则可得

和

公式(4)、(4-1)就是采用结构简图来推导封闭行星齿轮传动的传动比公式的普遍关系式。
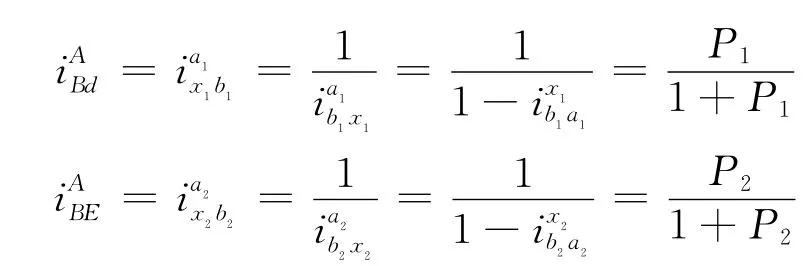
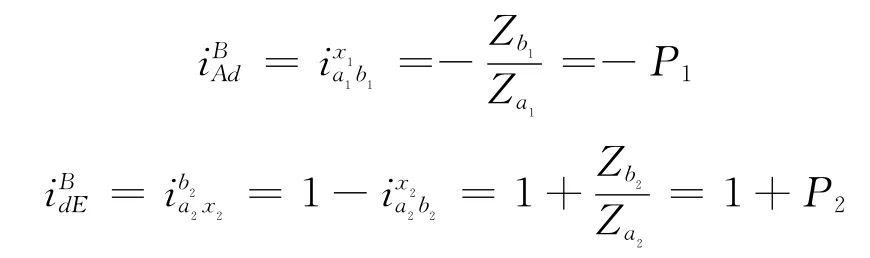
由封闭行星齿轮传动简图1和结构简图3可知,
由封闭行星齿轮传动简图1和结构简图3可知,

式中,Za1——中心轮a1的齿数;
Zb1——内齿轮b1的齿数;
P1——行星传动A1的特性参数,
则可得:

仿上,

式中,P2——行星传动A2的特性参数,
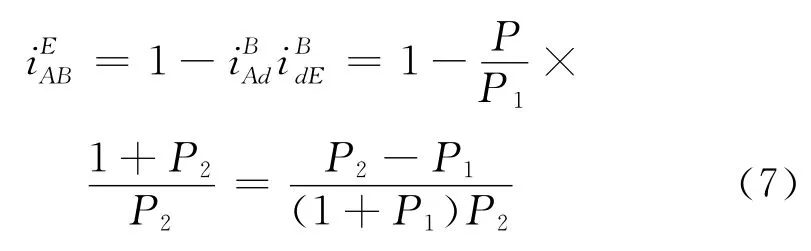
将公式(5)、(6)代入(4)式,则得传动简图1所示的反馈式封闭行星齿轮传动的传动比计算公式为
对于图2所示的功率分流式封闭行星齿轮传动,仍可采用结构简图4来推导其传动比计算公式。由传动简图2和结构简图4可知,

代入公式(4),则可得图2所示的封闭行星齿轮传动的传动比计算公式为

对于图3所示的复合式封闭行星齿轮传动应采用其对应的结构简图5来推导其传动比计算公式。由传动简图3和结构简图5可知,
代入公式(4-1),则可得图3所示的复合式封闭行星齿轮传动的传动比计算公式为
仿上,可控公式(4)可得传动比iEAB公式为

现将上述三种类型封闭行星传动的传动比计算公式及其各构件的转速的计算公式列于如下的表1中。

表1 封闭行星传动的传动比及其基本构件转速的计算公式Table1 Formula of the ratio for the closed planetary transmission gear and the basic structural speed
4 封闭行星齿轮传动的受力分析
对于2Z-X(A)型差动齿轮传动和简单行星齿轮传动所组成的封闭行星齿轮传动,应按照各自不同的封闭情况,推导其基本构件上的转矩关系。
在行星齿轮传动中,如果具有A、B和C三个基本构件,摩擦损失忽略不计,则可得如下的转矩关系式:

式中,TA、TB和TC分别为构件A、B和C的转矩;
nA、nB和nC分别为构件A、B和C的转速。因输入轴A的功率PA=TAnA>0,输出轴B的功率PB=TBnB<0。
由上式可得:

上式表明,作用在两个基本构件上带负号的转矩之比值应等于它们相对于第三个基本构件的转速之比值的倒数。
对于图1所示的封闭行星齿轮传动,应按照结构简图4和公式(11)可得其基本构件上的转矩关系式为
代入上式,则得

按照(10)式可得转臂x2上的转矩关系式为

对于图2所示的封闭行星齿轮传动,仿上可得其基本构件上的转矩关系式为

对于图3所示的封闭行星齿轮传动,应按照结构简图5,仿上,可得其基本构件上的转矩关系式为
按照(10)式可得内齿轮b2上的转矩Tb2为
输入轴A的转矩TA可按下式计算,即

式中,PA为输入功率,kW;nA为输入转速,r/min。
5 封闭行星齿轮传动的效率计算
在一般情况下,对于封闭行星齿轮传动,根据构件A或构件B为输入件(见图1~图3)的不同情况,其传动效率的公式也是不相同的。若采用啮合功率法推导其传动效率的计算公式比较麻烦繁琐[1]。现在特采用传动比法(前苏联学者克莱依涅斯:M.A.Kpeuhec提出的)来推导封闭行星齿轮传动的传动效率计算公式较为方便。
在图1~图3所示的封闭行星齿轮传动中,输入件A传递的功率PA>0,而输出件B的功率PB<0。因此,则可得封闭行星齿轮传动的效率公式为
因为,运动学传动比为
各个指标的平均分值相差不大,其中指标3“活动的环境”平均分相对较低,指标5、7、8的得分相对较高,指标10“家长的满意度”、4“活动的互动性”得分最高。可以看出,家长对该活动的开展极为满意,活动效果显著,值得推广。

且记动力学传动比为

则可得封闭行星齿轮传动效率的表达式为

式中 PA——输入件A传递的功率,kW;
PB——输入件B的输出功率,kW;
TB——输入件A上的转矩,N·m;
iAB——运动学传动比;
公式(28)称为克莱依涅斯(M.A.Kepuhec)公式。

代入(28)式则可得封闭行星齿轮传动的效率计算公式为

幂指数y1和y2可按下式确定,即
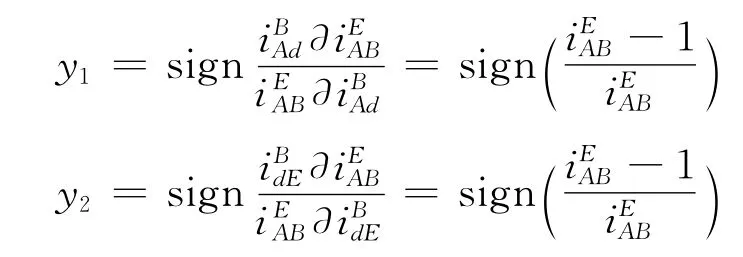
式中sign的数学含义是表示符号。
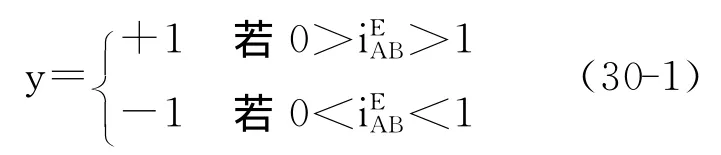
可记为

即可得幂指数
所以,封闭行星齿轮传动的效率计算公式为

6 封闭行星齿轮传动的计算示例
例题 已知:某个航空发动机中应用了一台功率分流式封闭行星齿轮减速器,其传动简图如图6所示。各轮齿数为Zz=35、Za=39,Zc=31、Zc=121239,Zb=97、Zb=117。其输入功率PA=2 800kW,12输入转速nA=12 800r/min。试求该封闭行星齿轮减速器的传动比、各构件的转矩和传动效率的大小。

图6 封闭供求矛盾传动简图Fig.6 Diagram of Closed planetary gear transmission
解:由图6所对应的结构图4可知:

因


输出轴B的转速nB=nx1=nb2为

行星轮C1和C2相对转臂x1和x2的转速为

由以上计算结果可见,在原始机构A1中,其行星轮C1相对于转臂x1的转速(nc-nx)较高;因此,对该
11原始机构A1中的行星齿轮的滚动轴承的要求也就较高。
对于该封闭行星齿轮传动的输入轴A的转矩TA可按公式(27)计算,即

由公式(12)可得其输出轴B上的转矩TB为

式中“-”号表示TB的转向与TA的转向相反。仿上,按照公式(17)~(21)的推导方法,则可得其各构件的转矩计算公式如下:

再按公式(30计算该封闭行星齿轮减速器的传动效率ηEAB


再按公式(30-1)计算可得幂指数:
y=+1
由简单行星齿轮传动效率计算公式可得[1]

原始机构A1的损失系数Ψx1m可按下式计算

其中,取啮合摩擦系数fm=0.1;Z1、Z2为齿轮副a1-c1和c1-b1中的小齿轮和大齿轮齿数。
按照公式(30)运算,可以求得原始机构A1的啮合损失系数Ψxm1=0.01904。
所以,可得原始机构A1的传动效率ηBAd为

封闭机构A2的传动效率ηdBE可按下式计算[1]即

再按公式(31)计算,则得该封闭行星齿轮减速器的传动效率ηEAB为
可见,该功率分流式封闭行星齿轮减速成器传动效率较高。(在此,尚未考虑到其中滚动轴承的传动效率约为η′=0.97)。
结束语:
通过以上的阐述可知,封闭行星齿轮传动与两级串承的2Z-X(A)型行星齿轮传动相比较,它的优点很明显。现在可以概括如下几点:
(1)由于在该封闭行星齿轮传动中,两个2ZX(A)型之间没有采用中间轴来进行连接,而是在机构A1与A2之间采用了基本构件进行封闭连接。因此,封闭行星齿轮传动在结构布局上较紧凑,体积较小、重量较轻。
(2)采用两个2Z-X(A)型串联的行星齿轮传动的传动比为iP=iⅠ×iⅡ。而封闭行星齿轮传动的传动比为iEAB。通过例题计算得知而iEAB=12.08。可见,封闭行星齿轮传动的传动比iEAB大于两个串联的2Z-X(A)型行星齿轮传动的传动比iP,即iEAB>iP。
(3)由于2Z-X(A)型行星齿轮传动的传动效率较高,即ηP=ηⅠ×ηⅡ=0.98×0.98=0.96。然而,由于在封闭行星齿轮传动中,其原始齿轮机构A1和封闭齿轮机构A2均采用了2Z-X(A)型行星齿轮传动,故该封闭行星齿轮传动的传动效率ηEAB仍然是较高的;即ηEAB>0.95。
因此,我们认为封闭行星齿轮传动这项新型的行星传动技术,确实具有许多独特的优点;在国外的现代机械设备中已见到许多应用的实例。所以,该项较先进的封闭行星传动技术,应在我国大力推广、应用和发展起来;其前景极其广阔。
[1] 饶振纲,行星齿轮传动设计,北京:化学工业出版社,2003.
[2] 饶振纲,功率分流式封闭行星减速器的设计研究,传动技术,1996(3).
[3] 库德里亚夫采夫B·H,基尔佳舍夫 Ю·H等,行星齿轮传动手册,陈启松、张展等译,北京:治金工业出版社,1986.
猜你喜欢
防爆电机(2022年4期)2022-08-17
汽车零部件(2020年7期)2020-08-03
中国眼镜科技杂志(2019年9期)2019-11-11
电子制作(2019年10期)2019-06-17
汽车实用技术(2019年9期)2019-05-15
汽车实用技术(2018年15期)2018-08-29
电子制作(2018年14期)2018-08-21
高中生学习·高二版(2017年9期)2017-10-25
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
