雷达风矢产品性能对比分析
2014-01-05 05:53朱克云
成都信息工程大学学报 2014年1期
徐 铖,朱克云,张 杰,明 静
(1.成都信息工程学院大气科学学院,高原大气与环境四川省重点实验室,四川 成都610225;2.成都军区空军气象中心,四川成都610041)
0 引言
在对风的探测和研究中,几十年来人们用了各种工具和各种方法,对于空中风的测量则主要采用的是探空气球。然而,利用跟踪气球测风,不仅费用较高,而且不能进行长期观测、时间分辨力低。
随着多普勒天气雷达在气象应用上的进一步推广和普及,气象学者对速度产品的研究和应用有了极大的发展,其中速度-方位显示(Velocity Azimuth Display,VAD)技术是在风场线性假设的条件下,从多普勒雷达观测的景象风中估计水平风的一种简单有效的方法。根据VAD技术得到不同时间各高度上的风向风速制作的垂直廓线图(VWP)能解释平均风矢量从低层到高层的演变现象,对分析流场的结构、分析风场在垂直方向上的厚度变化以及冷暖平流变化等非常有用。
风廓线雷达是一种新型探测设备,其时空分辨率超过任何高空风测量系统[1-2]。风廓线雷达根据多普勒效应,可以连续地观测测站上空垂直风场信息。它除了具有可连续探测优点外,还能够获取高空风和低空急流活动特征,能够提供高时空密度的气象信息。
如今,世界很多国家都已用风廓线雷达组成业务运行网,广泛应用于机场飞机起降、交通管制、气象预报和大气污染监测等方面[3]。
随着中国气象事业的发展和气象保障工作要求的提高,各级气象部门对风廓线雷达设备的需求也愈来愈迫切。中国也一直在开展风廓线雷达的研制及研究工作并取得一定进展[4-5],其中边界层风廓线雷达和对流层风廓线雷达技术已成熟,并已广泛应用于航空航天、水文水利、大气监测和天气预报等方面[9-10]。
目前关于多普勒天气雷达的风廓线产品,日常研究则比较少,有关多普勒天气雷达的风廓线产品和风廓线雷达风矢产品两者的对比的文献则几乎没有。风廓线产品对确定高低空急流、垂直风切变、冷暖平流、涡度等都有非常重要的帮助。因此,通过分析两种雷达测风原理、风矢产品的性能对比以及各种天气形势下两者的异同,为雷达风矢产品的应用提供一点思路。
1 风廓线雷达与多普勒天气雷达风廓线产品的对比分析
1.1 VWP产品介绍
VWP即速度方位显示风廓线。VWP产品的生成原理是用雷达每个体扫资料在不同高度上通过VAD技术得到该高度上的平均风的风向风速。通过把不同体扫和各个高度上的计算结果画在同一张图上,表示测站上空高空风的分布随时间的变化,所以利用VWP产品可以直观地了解高空风的变化。该产品主要应用于大气边界层气象研究、大气污染研究、人工影响天气等方面。关于VWP产品的基本应用,我们可以总结得到几点:(1)VWP可以较准确地反映各层槽线、切变线、地面锋区过境情况。(2)VWP可以利用热成风原理确定冷暖平流层次和大小,从而反映本站大气层结稳定度变化情况。(3)VWP可以判断本站上空高低空急流。
VWP产品对测站上空高空风的分布随时间变化的探测,这是常规观测手段所无法做到的。
1.2 风廓线雷达简介
1.2.1 风廓线雷达探测原理
风廓线雷达(wind profiler radar/wind profiling radar/wind profiler)是一种新型的测风雷达,它以晴空大气湍流对入射电磁波的散射回波为探测基础,采用多普勒雷达收发技术体制,用同一高度上的5个波束指向的多普勒速度测量值联合求解出大气3维风场。
1.2.2 风廓线雷达风矢产品介绍
从原理上讲,风廓线雷达能在所有天气条件下测量风廓线。降雨会增强回波信号强度,有助于增大水平风测量的有效垂直高度。风廓线雷达的主要优点是能够在无人值守状态下工作,并且几乎能在站址的正上方做连续的风测量。正是由于风廓线雷达具有精度和时空分辨率高、连续性和实时性好的特点,是其成为高空气象探测的重要设备,是当前常规气球探空体制的重要补充,是天气预报和气象保障的重要手段。
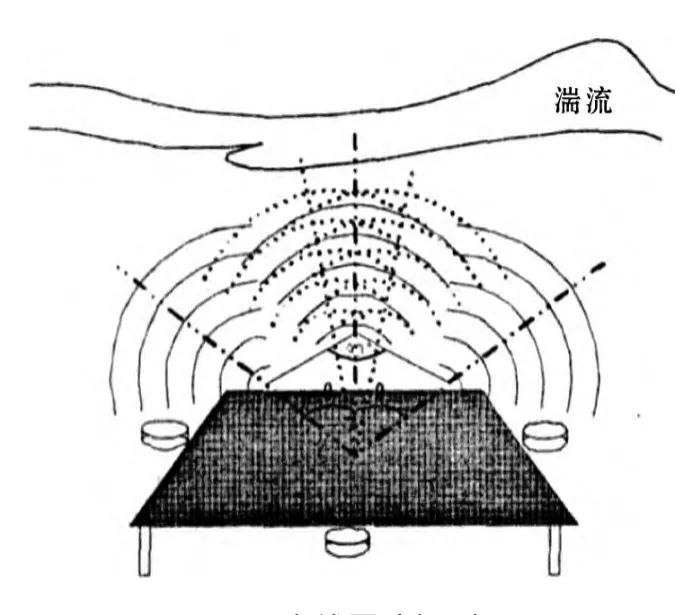
图1 风廓线雷达探测原理
2 实际观测个例中的对比分析
文中的数据分别来自于成都新一代C波段多普勒天气雷达和爱尔达边界层风廓线雷达,两部雷达相距85m。多普勒天气雷达资料中VWP的最大探测高度为12.6km,而边界层风廓线雷达的最大探测高度为3.4km。因此,涉及到的两种雷达产品只在3.4km以下有可对比性。故文中只对两种雷达产品3.4km以下数据进行对比分析。
2.1 晴天个例对比分析
2010年5月5日,成都天气为晴天。图2(a)的数据来自于多普勒天气雷达风廓线产品,图2(b)的数据来自边界层风廓线雷达。

图2 成都2010年5月5日09:03-09:40间的风矢图
图2(a)给出了多普勒天气雷达风廓线产品在2010年5月5日9时03分至9时59分成都的各高度上的风速和风向廓线。图2(b)为风廓线雷达在同一时间段上空各高度上的风速和风向廓线。多普勒天气雷达风廓线图中,0.5km至1.8km的风向和风速较为稳定,风向随高度变化均为南风向上转为东南风,风速略有递增,与风廓线雷达风廓线图较为一致。在离地面3km的风速和风向相对于风廓线雷达风廓线图十分混乱且不稳定。
在该段时间内,都有低空急流出现。且从图上看,低空急流有向下延伸的趋势。而从风廓线雷达风廓线图上看到,该低空急流随时间有向上收缩的趋势。
通过该个例,发现除了风廓线雷达无法表示晴天时大气中的干区以外,两者还存在一些区别:风廓线雷达得到的风向比多普勒天气雷达风廓线产品得到的风向偏北;对于低空急流位置的确定,风廓线雷达得到的低空急流比多普勒天气雷达VWP产品得到的低空急流范围更加集中,这说明,在晴天状态下,风廓线雷达探测低空风场更准确。
2.2 小降水天气个例
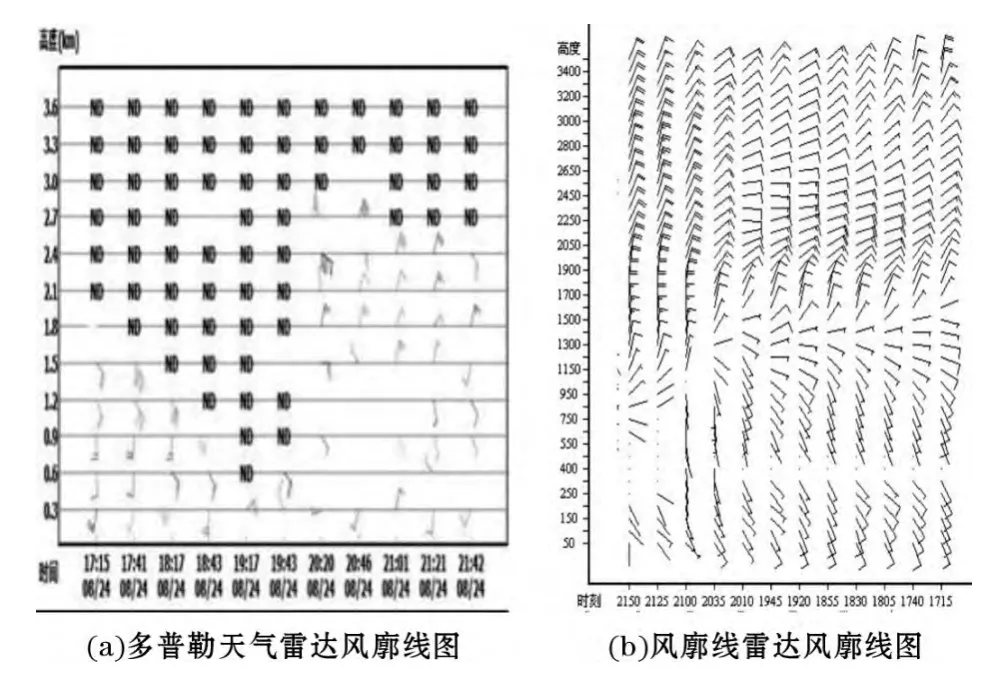
图3 成都2010年8月24日17:15-21:45小雨天气的风矢图
2010年8月24日成都为小雨天气。图3(a)的数据来自于多普勒天气雷达风廓线产品,图3(b)的数据来自边界层风廓线雷达。图3(a)给出了多普勒天气雷达风廓线产品在2010年8月24日17时15分至21时42分探测的各高度上的风速和风向廓线。图3(b)显示的是风廓线雷达在2010年8月24日17时15分至21时50分上空各高度上的风速和风向廓线。由该图可以看到在此时间段内,多普勒雷达图1km以下风向以偏南风为主,19时17分至19时43分0.6km以上均显示“ND”(干区)。在1.5km以上,风向较为混乱,风速值也存在较大的变动。在风廓线雷达图中,0.6km以下为稳定的东南气流。随着高度增加,风向逐渐呈逆时针旋转,1.3km高度上风向为东风,随高度往上转为东北风,在3.4km高度上边界层附近,转为偏北风。
通过该个例发现:(1)多普勒天气雷达VWP产品得到的风廓线图可以根据其“ND”区厚度的变化来判断降水前后大气中的水汽含量,而风廓线雷达无法判断。(2)在小降水的天气状况下,风廓线雷达得到的风廓线图仍然比多普勒天气雷达VWP产品得到的风廓线图显示的风向偏北。(3)小降水时,多普勒天气雷达得到的近地层风速略大于风廓线雷达得到的近地层风速。(4)在湿度层很薄,仅有弱降水时,天气雷达VWP数据精度不高。
2.3 大降水天气个例
2010年8月18日成都天气为雷雨、阵雨转多云的天气。图4(a)的数据来自于多普勒天气雷达风廓线产品,图4(b)的数据来自边界层风廓线雷达。
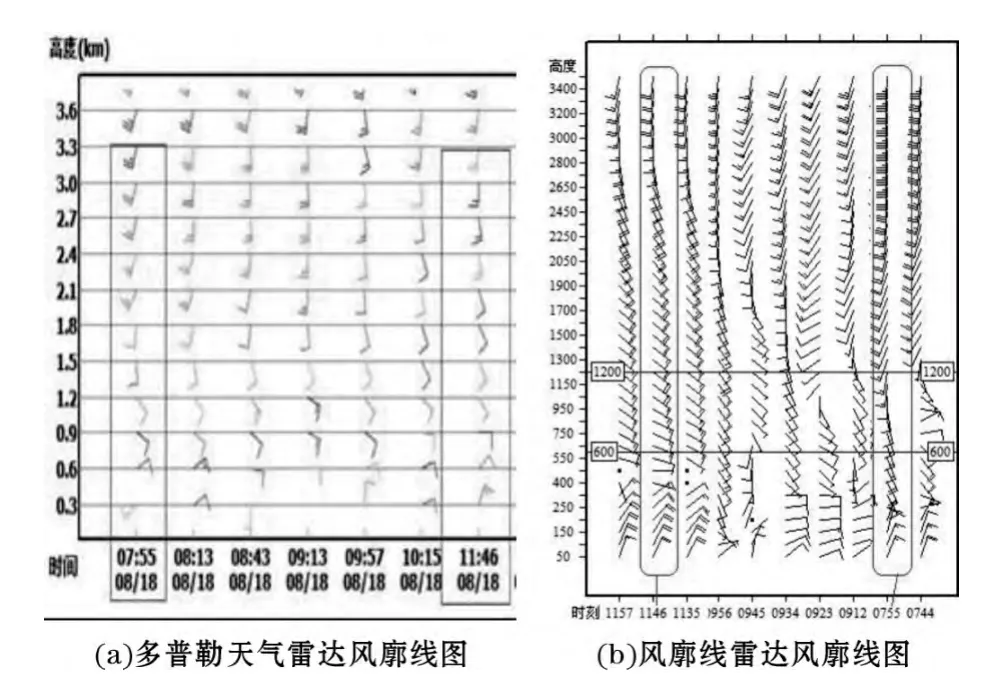
图4 成都2010年8月18日雷雨、阵雨转多云天气的风矢图
图4(a)显示的是多普勒天气雷达在2010年8月18日07时55分至19时45分VWP图。图4(b)显示的是风廓线雷达在2010年8月18日07时44分至11时57分上空各高度上的风速和风向廓线。从图上可以看到,整个时间段内,风向随高度成逆时针变化,风速较为稳定。风廓线雷达图中风向较多普勒天气雷达的风廓线图稍混乱。
下面对两个时刻的两个风廓线图进行比较:
(1)07时55分,此时天气状况为阵雨。在图4(a)上,1.2 km高度以下风向为偏东气流。1.5 km以上为偏南气流。在图4(b)上的同一时刻,0.2 km以下为东北风,0.2 km至0.5 km高度内为东南气流,0.5km以上为偏南气流。与多普勒天气雷达的风廓线图相比,风向比较相符,风速两者有所不同,风廓线雷达的风廓线图上风速比多普勒天气雷达的风廓线图上的风速快2~4 m/s。
(2)11时46分,该时刻没有降水,为阴天。图4(a)上,1.2 km高度以下风向为偏东气流。1.5 km以上为偏南气流。图4(b)上的同一时刻,0.6 km以下为东北风。0.6 km至3.4 km高度内,风向由东南风顺时针旋转为南风。与多普勒天气雷达的风廓线图相比,两者基本上相符合。
说明在大降水天气下,两者的风向基本一致,而风廓线雷达所得到的风速比多普勒天气雷达得到的风速快2~4m/s。在大降水结束后,天气状况由阵雨转为阴天时,两者的风向和风速都基本吻合,可信度较高。
2.4 系统过境个例
2.4.1 小高压过境个例
2010年8月17日成都为多云转雷雨天气。图5(a)的数据来自于多普勒天气雷达风廓线产品,图5(b)的数据来自边界层风廓线雷达。
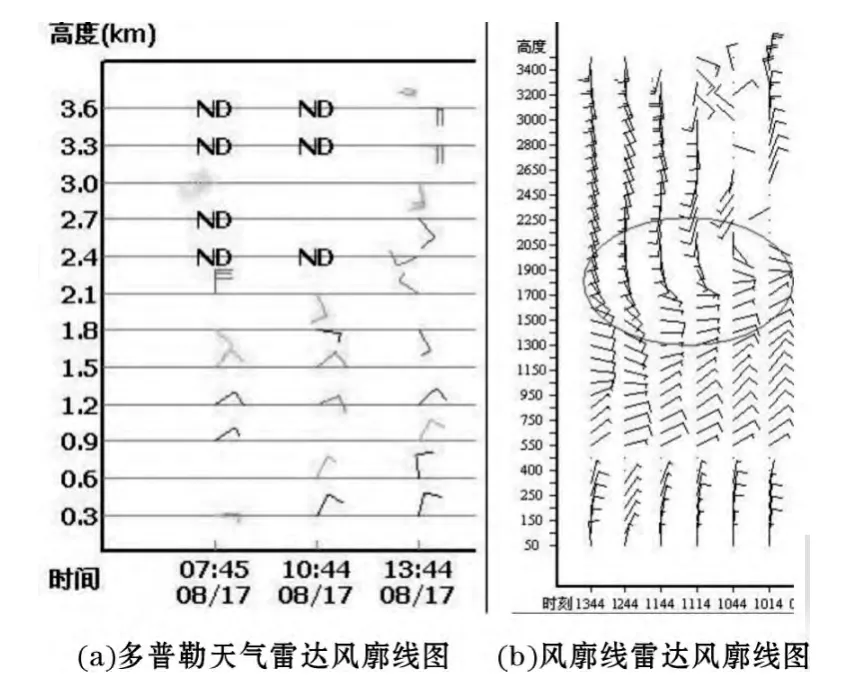
图5 成都2010年8月17日多云转雷雨天气风矢图
图5(a)显示的是多普勒天气雷达在2010年8月17日07时45分至13时44分上空各高度上的风速和风向廓线。图5(b)显示的是风廓线雷达在2010年8月17日10时14分至13时44分上空各高度上的风速和风向廓线。可以看到,图5<b>中,在1.3 km至2 km高度内可以发现,10时14分吹东北风,随着时间的推移,风向逐渐顺时针转动,风向逐渐由东北风变为东风,再变到东南风。至12时44分时,已经是稳定的东南气流。可以清楚地辨别出这里有一个高压过境,这是一个小高压从测站北侧经过的过程。而图5(a)中,系统过境的特征不明显。由此我们可以发现当有小高压过境时,风廓线雷达的风廓线图上有明显的特征,而多普勒天气雷达VWP产品上无法清楚地辨别。
2.4.2 高空槽过境个例
2010年8月20日成都为多云天气。图6(a)的数据来自于多普勒天气雷达风廓线产品,图6(b)的数据来自边界层风廓线雷达。
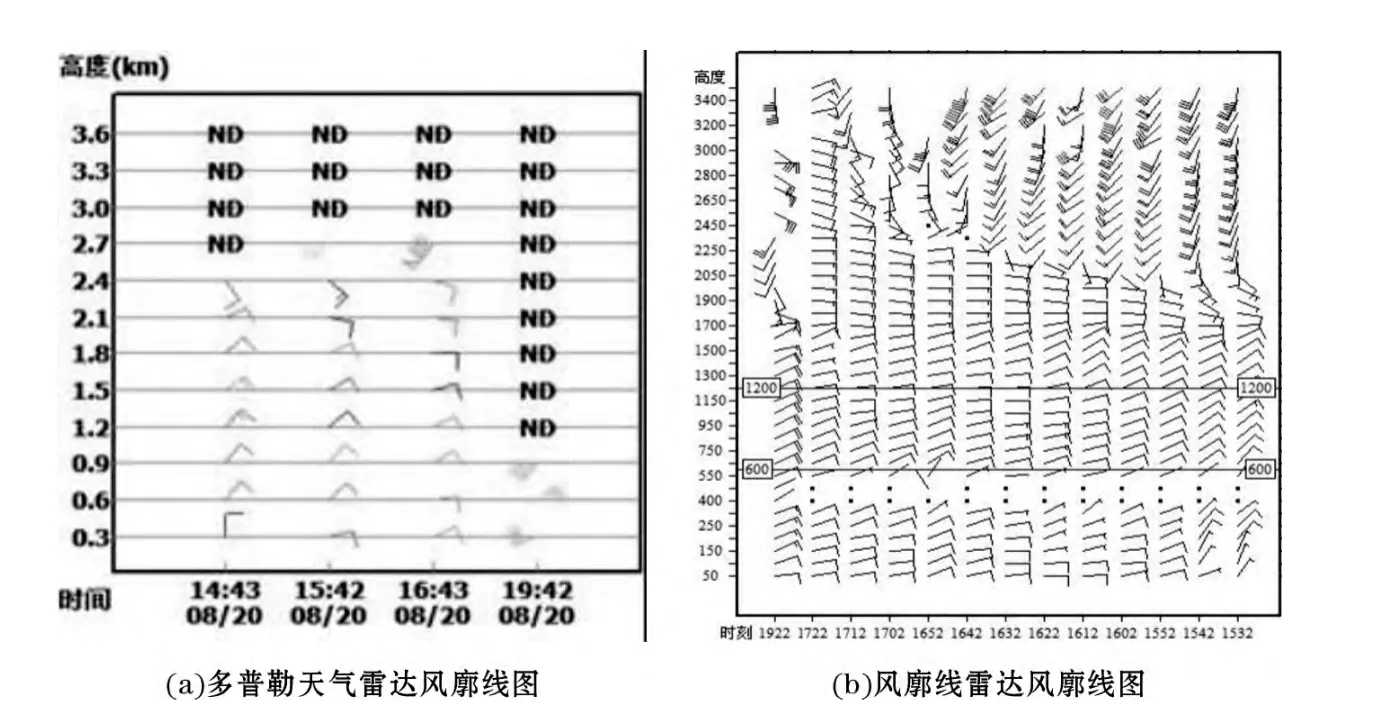
图6 成都2010年8月20日多云天气风矢图
图6(a)显示的是多普勒天气雷达在2010年8月20日09时44分至19时42分上空各高度上的风速和风向廓线。由图上可以看出,从15时42分开始,在约2.4 km高度上发生了风切变,2.4 km以下吹东北风,2.4 km以上为西南风。由图上看到,虽然存在风切变,但无明显的高空槽过境的特征。
图6(b)显示的是风廓线雷达在2010年8月20日15时32分至19时22分上空各高度上的风速和风向廓线。由图上可知,15时32分时,2 km高度以下为深厚的东北气流,2 km以上风向发生切变,变为西南风速风,且风速随高度增大。17时02分切变消失,风向随高度顺时针转动,在2 km以上由东风转变为东南风最后转为南风,说明此时高空槽已经过境。
对高空槽过境时两种雷达资料进行对比分析,风廓线雷达的风廓线图与多普勒雷达的风廓线图所显示的风向以及发生切变的位置和时间都大致相同,但两者所显示的风速却相差很大,多普勒天气雷达测得的风速比风廓线雷达测得的风速快2~4 m/s。相比之下,高空槽过境时在多普勒天气雷达的风廓线图上的特征不如在风廓线雷达的风廓线图上明显。
3 结论
选取了5个实例来对风廓线雷达和多普勒天气雷达风廓线产品进行对比分析,分别对比了两者在晴天、小降水、大降水以及小高压和高空槽过境情况下的异同点。综上所述,可以得出以下结论:
(1)天气状况为晴天时,两种雷达风矢产品的风速一致,风廓线雷达所测风向在南北方向上偏北。对于低空急流位置的确定,风廓线雷达得到的低空急流范围更加集中。
(2)若有小降水时,两种雷达风矢产品所显示的地面风向相似度很高,风速有所差别:对于空中风,风廓线雷达得到的风廓线图风速、风向都比较混乱,尤其在接近边界层,两者的风速和风向差别都比较大。
(3)在大降水天气下,两者的风向基本一致,风廓线雷达所得到的风速比多普勒天气雷达得到的风速快2~4 m/s。天气状况由降水转为阴天时,两者的风向和风速都基本吻合,可信度较高。
(4)当有系统过境时,风廓线雷达所得产品表现的更为明显,而多普勒雷达则不够清楚。
[1] NOAA风廓线网站:http://www.profiler.noaa.gov.
[2] 张霭琛.现代气象观测[M].北京:北京大学出版社,2002:289-299.
[3] 孙宪章.大气遥感探测系统——风廓线雷达[J].现代雷达,1994,4(2):21-30.
[4] 吕达仁,王普才,邱金恒,等.大气遥感与卫星气象学研究的进展与回顾[J].大气科学,2003,27(4):552-566.
[5] 张胜军,徐祥德,吴庆梅,等.“中国登陆台风外场科学试验”风廓线仪探测资料在四维同化中的初步应用研究[J].应用气象学报,2004,15(增刊):101-108.
[6] 马大安,田文斌,丁渭兴,等.对流层风廓线雷达的研制[R].京津冀中尺度气象试验基地文集[C].中国气象科学研究院中尺度气象研究所,1989.
[7] 顾映欣,陶祖钰.1989—1990年UHF风廓线雷达资料的分析和应用[R].中尺度气象文集[C].北京:气象出版社,1993.194-201.
[8] 陈少应,王凡.风廓线雷达测量精度分析[J].现代雷达,2000,10(5):11-17.
[9] 阮征,葛润生,吴志根.风廓线仪探测降水云体结构方法的研究[J].应用气象学报,2001,13(3):330-338.
[10] Atlas D.Radar in meteorology[J].American Meteorological Society,1990:180-220.
猜你喜欢
农业灾害研究(2022年8期)2022-10-01
金沙江文艺(2022年4期)2022-04-26
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年3期)2021-11-22
现代临床医学(2021年1期)2021-01-26
供水技术(2020年6期)2020-03-17
成都信息工程大学学报(2018年4期)2019-01-23
儿童故事画报·发现号趣味百科(2018年1期)2018-11-14
东北史地(学问)(2016年6期)2016-12-14
中亚信息(2016年3期)2016-12-01