
多传感器信息融合的层级关系研究
2014-01-02 07:57唐琳
赤峰学院学报·自然科学版 2014年19期
唐 琳
(赤峰学院 计算机与信息工程学院,内蒙古 赤峰 024000)
1 引言
进入21世纪以后,传感器的通用性和专用性都有了明显的提升,其性价比也有了很大的提高,其应用领域也日益广泛.本文以面向复杂环境的多传感器系统为例,该系统目前正广泛应用于以陆、海、空、天、电磁为范围的现代军事战场中,传统的单传感器信息采集方式已无法满足在上述战场中所使用的精确制导武器和远程打击武器等高技术兵器的现代作战需要,必须运用覆盖宽广频段的各种有源和无源探测器在内的多传感器集成系统.
通过多传感器系统采集多种观测数据,从而形成多层次、多方面、多级别的数据信息.多传感器系统中的信息具有多样性、复杂性、实时性等多种特性,多传感器系统及多传感器网络被广泛应用于军事、民事等领域,并由此出现了一个新兴的学科—多传感器信息融合.
2 多传感器信息融合的定义
多传感器信息融合应用范围广泛,在不同领域的应用具有不同的内涵和理解,截止目前,仍没有统一的被广泛采纳的定义出现,各个实验室或组织机构针对多传感器信息融合给出了不同的定义,具体划分如下.
定义1 军事领域中将信息融合作为一个多层次、多方面的信息处理过程,包括检测、相关、组合和估计,具体可包含检测、互联、关联(相关)、状态评估、目标识别、态势描述、威胁、估计、传感器管理和数据等多个层级,综合处理不同级别上的传感器数据,每个级别分别对应不同的抽象,这些抽象包括从检测到威胁判断、武器分配和通道组织的完整过程,在统一标准下执行后完成决策和估计任务,从而提高状态和身份估计的精度.此定义表明信息融合是以对来自多个传感器的数据进行多级别、多方面、多层次的处理为核心,从而产生新的有意义的信息,这种信息是单传感器所无法获取的.
定义2 信息融合就是将从传感器、数据库、知识库和人类本身来获取的多源信息,进行滤波、相关和集成,利用多传感器对用时序采集法获得的多源信息进行自动分析、优化综合,从而形成一个框架,这种架构适合于获得有关决策、对信息的解释、达到系统目标(如何识别或跟踪目标)、传感器管理和系统控制.这一定义中的信息融合以多传感器为基础,以协调优化和综合处理为信息融合的核心,将多源信息作为信息融合的加工对象,对战场态势和威胁的重要程度作出评价.
定义3 综合定义1和定义2,分析可得出,信息融合即将来自多个传感器或多源的信息进行综合处理,从而得出更准确、可靠的结论的过程.利用计算机进行多源信息的处理,从而得到可综合利用信息的理论和方法,其中也包含对自然界人和动物大脑进行多传感信息融合机理的探索.信息融合研究的关键问题,就是提出一些理论和方法,对具有相似或不同特征模式的多源信息进行处理,以获得具有相关和集成特性的融合信息.
3 多传感器信息融合技术的特性
信息融合技术在多传感器系统中的应用,与单传感器系统相比,有很多新的特性和优点,总结如下:
(1)系统生存能力相对较强.使用多传感器可以在受到干扰时总会有一部分能够正常工作,提供数据信息,使系统能够连续进行,避免故障,同时增加检测概率.
(2)空间覆盖范围相对更广.使用交错分布的多传感器,原则上能够覆盖更大的空间范围,甚至覆盖整个区域,可以弥补单传感器技术存在无法探测区域这一缺陷,扩大了可以探测的范围,进而增加了系统的空间监视范围和检测概率.
(3)时间覆盖范围有所加长.以协同工作机制为中心的多传感器系统在工作中可以实现循环作业,当探测目标无法被其中几个或者某些传感器探测到时,其它传感器仍然可以进行查缺补漏,持续检测、测量目标或事件,由此系统的时间监视范围和检测概率都得到了有效提升.
(4)系统可靠性和可信度都得到了提高.在实际环境中,对同一个目标或事件来说,可以被多个传感器同时检测确认,数据采集相较单一传感器检测来说更加准确可靠,传感器之间的相互配合更加精准,功能更加强大,但其缺点是存在着一定的冗余度.
(5)信息模糊性被有效弥补.在多传感器系统中,信息是整合的,联合信息将会帮助系统获得了较大的信息熵,目标或事件当中所存在的不确定性被有效降低,大大减少了信息的模糊性.
(6)探测性能较单一时代更加优良.利用多传感器系统的不同型号甚至不同种类的传感器,可对待测区域的目标或事件进行多种途径的检测和测量,不同途径、不同手段得到的数据将被融合采集,从而提高了系统探测的有效性.
(7)空间分辨率有所提高.单一传感器只能够获取较低的信息分辨率,而使用多传感器协调检测可以在一定程度上进行不同效果的弥补,弥补后的分辨率将会有所加强,在弥补的同时还可以用改善的目标位置数据支持防御反应能力和攻击方向的选择.
(8)测量空间维数增加.在测量空间维数方面,电磁频谱的各个阶段被多种不同的传感器共同测量,大大降低了外界的干扰,有效防止了敌方行动或自然现象的破坏.
但与传统中的单传感器系统相比,多传感器系统复杂性要高的多,其成本势必也会加大,同时传感器系统的设备尺寸(重量、功耗)等物理因素将会增大,物理设施增多所带来的辐射信号增多,势必会导致被敌方发现概率增大,因此在实际任务执行时,必须权衡考虑各系统的利弊进而做出最佳选择.
4 多传感器信息融合的基本原理
人的大脑对外界复杂问题的处理是一个生物上的综合处理过程,与此类似,多传感器信息融合对普通大众来说就是对人脑生物综合处理过程的功能模拟.在现实的多传感器系统中,不同类型或型号的传感器所提供的信息也具有(如:时变、非时变;实时、非实时;快变、缓变;模糊、确定;)不同的特征.信息的这些不同特征在数据融合时的表现各不相同,因此在信息整合时要综合考虑、区分对待信息的不同特征,相对人脑对信息综合处理的过程而言,信息(数据)融合的基本原理与之及其相近,在充分利用多传感器资源基础上通过对各传感器及其观测信息的合理支配与使用,将各种传感器在空间和时间上的互补与冗余信息依据某种优化准则组合起来,产生对观测环境的一致性解释和描述.
我们只能在各种传感器分离观测信息的基础上建立起多传感器信息融合的目标,这样就能够对信息优化组合后的有效信息进行最佳及更多的导出,信息融合的这一过程充分向我们展现出了最佳协同作用,最终达到利用多个传感器共同或联合操作的优势.
5 信息融合的层次级别关系
多传感器信息融合技术与传统信号处理方式有着明显差别,信息融合之前要经历一个数据采集的过程,融合时所处理的数据信息由多种传感器提供,这样其就拥有复杂的经常出现在信息的各级层面上的表现形式,这些信息层面被统一概括为信息抽象层次结构,包括:检测层、位置层、属性层、态势层、威胁层,如图1所示.
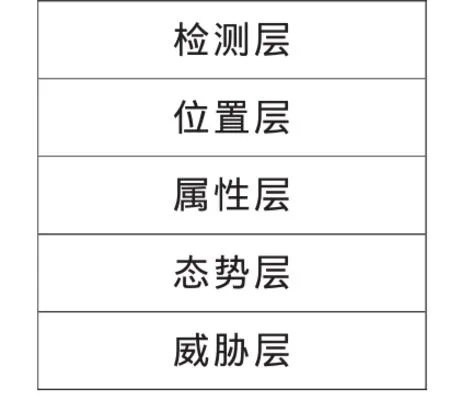
图1 信息抽象层次结构图
当信息融合时,会触发融合作用机制,这些信息融合作用在信息抽象层次上时,通常被划分为5级信息融合,分别是:检测级融合、位置级融合、属性级融合(又称目标识别)、态势评估、威胁估计,如图2所示.
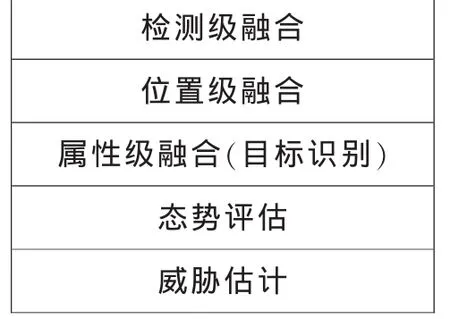
图2 5级信息融合结构图
5.1 检测级融合,可直接将采集到的信号进行融合,也可直接在多传感器分布检测系统中检测判决,多传感器检测主要包括经典检测和分布式检测两种,所谓的经典检测则是不经过其他复杂多变的过程,也不需要经过其他环节,而是直接将检测到的原始信号传送给处理器,继而再经由经典统计推理设计而成的算法进行检测工作,最终来完成最优目标检测;多传感器网络最常用到的就是分布式网络,也被称为分布式检测,在分布式检测中,单个传感器首先独立工作,继而每个传感器对观测到的信号进行预处理,处理过程其实就是一个数据压缩过程,随后将压缩后的信息传送给其他传感器,最后将信息汇总融合后产生全局检测判决,这一融合过程被称为检测级融合.
5.2 位置级融合,不需要中转其它过程,而是在传感器的观测报告或测量点迹和传感器的状态估计上直接进行融合,融合过程可以划分为时间融合和空间融合两种,在各融合级别中位置级位于中间层次,也是最重要的融合,融合方式主要有集中式和分布式两种,属于跟踪级融合.集中式融合依据目标检测时序不同按对目标观测的时间先后对测量点迹进行时间融合,继而对各个传感器在同一时刻对同一目标的观测进行空间融合,包括了多传感器综合跟踪与数据融合的全过程;分布式融合首先需要完成单传感器的多目标跟踪与状态估计,继而各传感器再将获得的各种信息送进融合节点,实现空间融合.
5.3 属性级融合涉及到的问题主要是属性分类,也称目标识别或身份估计,常见的属性级融合方法一般常见的有三种,分别是决策级融合、特征级融合和数据级融合.
在使用决策级融合时,传感器需要单独工作,在工作时每个传感器首先要进行层级变换和身份变换,变换后才能获得独立的身份估计,获得身份估计后再对每个传感器的属性分类进行融合.
在使用特征级融合时,系统中众多的传感器同时工作,但是工作中每个传感器又都相对独立,即同一时间只观测一个目标对象,根据目标的观测结果完成特征提取后才能获得由传感器提供的特征向量,将这些特征向量融合后产生联合特征向量从而生成身份估计.
在使用数据级融合时,因为传感器量级(型号或类型)不同,产生的观测数据也会不同,而数据级融合面对的是等量级的传感器,在这一级可直接融合同等量级传感器产生的原始数据,将这些原始数据抽样并进行初步数据提取后,形成融合后的传感器数据,继而再对它们进行特征提取和身份估计.在数据级信息融合实现时,只能对同类传感器采集的数据进行融合,所以数据级融合就要求所有传感器必须是同类型或同等量级的,这样才能关联上原始数据流.
5.4 态势评估最早出现于战场上,是对战斗力量分配情况的评价过程,评估时首先要确定态势要素,其估计结果主要为指挥员提供战场态势综合视图,其处理的是正在发生的及前面已经发生且现在正在进行的事件或活动,重点对行为样式进行关注.
5.5 威胁估计产生于态势评估的基础上,前期工作由态势评估完成,只有完成态势评估后才能对地方破坏能力、动机能力、运动模式及行为企图的先验知识进行综合梳理,从而得出敌方对我方的威胁程度或作战事件出现的严重性,并以此为据发出警告或作出指示,这一估计过程也是一个多层视图的处理过程,其估计结果等同多层视图处理结果.
6 多传感器信息融合的应用
多传感器信息融合最早应用于军事领域,其应用范围很广,涉及现代军事战争中的各种战术、战役和战略C3I系统等,主要应用在对目标机动性和武器杀伤力有较高要求的武器系统、远程控制或自主武器系统、雷达组网系统、一体化综合电子信息系统、单兵作战、单平台武器系统、战术战略指挥、控制、通信、计算机、情报、监视、侦察任务等广阔领域.
多传感器信息融合在民事上也有着广泛的应用,主要应用在工业过程监视、工业机器人、遥感、毒品检查、病人照顾系统、金融系统、船舶避碰与交通管制系统、空中交通管制等多个领域.
现今世界范围内多传感器信息融合理论与技术正处于迅速发展的高峰阶段,我国信息融合技术历经多年发展并在前人不断推陈出新的基础上已发展成为多方关注的共性关键技术,由此衍生出了许多热门研究方向,在多传感器领域相继出现了各种多目标跟踪系统和有初步综合能力的多传感器信息融合系统,大多在向多传感器信息融合和系统综合集成方向发展,甚至有很多学者专门从事无线多传感器网络中如何防范恶意节点方面的安全技术研究,相信随着时间的推移,预计将有更多的多传感器信息融合系统投入使用.
猜你喜欢
今日农业(2021年19期)2022-01-12
纺织科学研究(2021年1期)2021-12-03
中老年保健(2021年11期)2021-08-22
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
现代出版(2020年3期)2020-06-20
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
中学英语之友·上(2008年2期)2008-04-01
中学英语之友·上(2008年2期)2008-04-01
