
下肢惯性参数对逆向动力学计算的敏感性研究
2014-01-01 02:59王国栋陆阿明张英媛陈金鳌
体育科研 2014年1期
王国栋 ,陆阿明, 张英媛 ,陈金鳌
1 研究目的
人体惯性参数包括:人体整体及各环节质量(Mass)、质心位置(COM)及转动惯量[1],是进行人体建模、运动及其损伤分析的基础,也是人类工效学、运动科学研究的重要组成部分。其参数的准确性直接影响到人体运动学、动力学计算结果的可靠性[2-4]。
在运动分析过程中,减小系统误差是研究者们重要的工作之一。如在进行逆向动力学计算时,人体惯性参数与运动学数据(运动捕捉系统提供)、动力学数据(测力设备提供)一起作为输入变量,计算关节内力、力矩、功率及做功等[5,6]。计算中,人体惯性参数改变可造成影响的指标范围包括:环节(全身)重心位置、速度、加速度、动量、关节内力、关节力矩、功率和做功等。研究者对计算中运动学与动力学数据精准度的影响因素及其程度的研究较为深入,包括反光点的位置、皮肤滑动、系统精确性等[7]。然而,由于人体各环节的惯性参数并不能够直接测量,加上精确测量的复杂性(人体环节形状不规则、不同质、边界模糊性)、样本量、种族、技术方法等的限制,目前研究者很难选择适合所选研究对象的人体惯性参数模型,所以大多不考虑模型选择带来的误差。加上对不同人体环节惯性参数带来的差异研究较少,选择不同人体惯性参数模型时,参数差异对运动中相关生物力学指标的影响程度还不清楚,这也直接导致在比较采用不同模型计算的结果时,可比性降低。
纵跳是人类基本的运动动作之一,也是运动能力的评价手段,在医疗上,用以判断运动员或职业工作者的康复程度[8-10]。而分析纵跳等过程各关节贡献情况难免要用逆向动力学方法进行计算[11],即涉及到人体惯性参数的应用。目前研究者在进行运动录像解析及动力学仿真建模中常受到国外系统的约束,采用系统自带的人体环节惯性参数模型,较少采用中国人体惯性参数,已有学者研究采用不同模型计算结果的差异,但由于人体惯性参数包括环节质量、质心位置及转动惯量,亦有多个关节参与,这些参数对计算结果的敏感性还不清楚。
基于以上所述,本文旨在:以中国人体环节惯性参数模型为基础,人为地改变下肢环节惯性参数值的范围(±5%和±10%),计算环节惯性参数改变对逆向动力学计算结果(包括关节净力矩、功率、做功)的影响,并比较其敏感性。
2 研究方法
2.1 实验对象
11名健康成年男性受试者志愿参加本实验,年龄(23.6±1.6)岁,身高(176.0±3.2)cm,体重(71.6±6.4)kg,所有受试者均有良好的运动习惯、常规饮食,身体状况良好,能够熟练掌握测试动作,并在试验前3个月内无下肢肌肉、关节运动损伤,所有受试者日常积极参加体育锻炼。
2.2 仪器设备
热身活动采用h/p/cosmos 专业运动跑台(Nussdorf-Traunstein, Germany)。利用8个摄像头VICON红外运动捕捉系统(Oxford Metrics, UK)进行运动学数据采集,采用标准Fullbody模型,在受试者全身贴上39个直径9 mm的Marker点,系统采样频率200 Hz。地面反作用力数据采用KISTLER三维测力台9281A获得(Kistler Instruments AG, Switzerland),采样频率1000 Hz。采用Datalog数据采集盒将运动捕捉系统与测力台进行同步(见图1)。

图1 红外相机及三维测力台空间标定后重构图Figure 1 Figure Drawn after the Spatial Calibration of Infrared Camera and 3D Force-measuring Platform
2.3 测试流程
受试者身着紧身衣,贴好Marker点,用跑台热身后(以身体微汗为准),站立于测力台上,双手叉腰,熟悉测试动作,然后分别完成下蹲跳动作,动作测试3次。同时采集运动学数据与动力学数据。
2.4 人体惯性参数模型
本文所运用的人体惯性参数模型(男性)为郑秀媛模型[1],该模型采用CT技术测量所得,拥有大样本量,文中具体选择成年男性人体模型。
2.5 数据处理
运用MATLAB7.0数学软件(Math-Works, Inc.,USA) ,运用4阶零延迟Butter-worth滤波器对原始运动数据进行平滑滤波处理,截止频率8 Hz,而后插值匹配测力台数据进行逆向动力学计算,将下肢抽象为大腿、小腿与足3个刚体环节,计算下肢矢状面关节内力、关节静力矩、关节功率及关节做功[5,6]。分解于每个环节,计算方法如下:
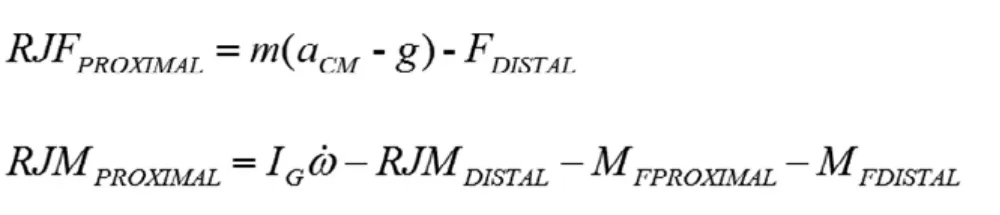
其中,RJFPROXIMAL为环节近端受到的合作用力,m为环节质量,αCM为环节质心加速度,g为重力加速度,FDISTAL为环节远端受到的合作用力,RJMPROXIMAL为近端关节合力矩,IG为环节相对于质心转动惯量的改变量,RJMDISTAL远端关节合力矩,MFPROXIMAL为由环节近端合作用力产生的的力矩(相对于环节重心),MFDISTAL为由环节远端合作用力产生的的力矩(相对于环节重心)(见图2)。
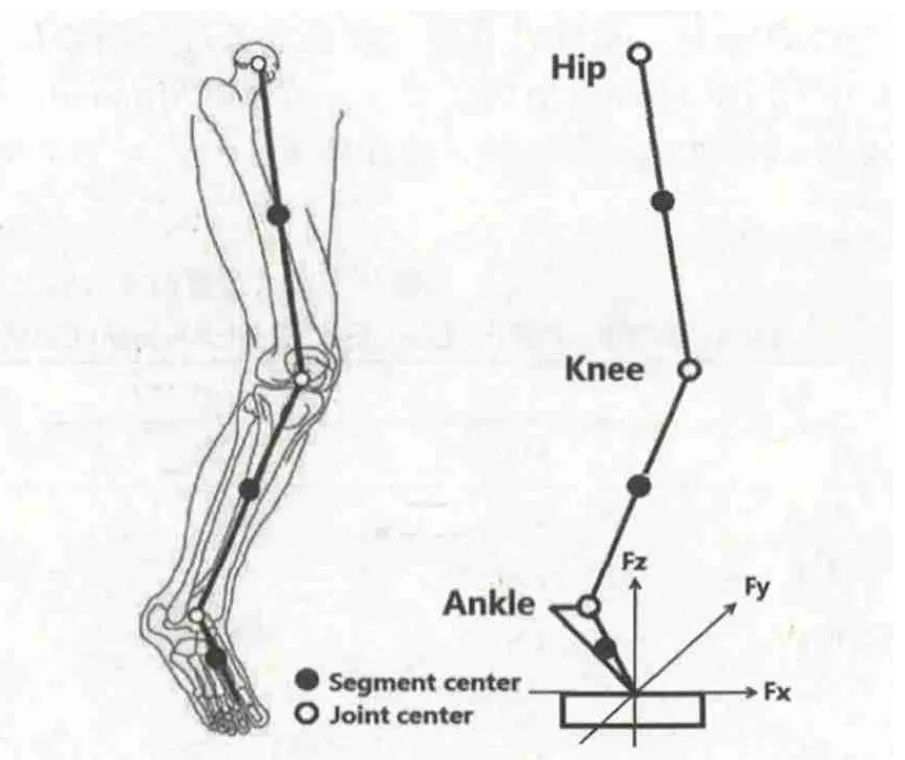
图2 下肢模型示意图Figure 2 Lower Limb Model
对于计算出的关节力矩,计算关节功率及关节做功方法如下:
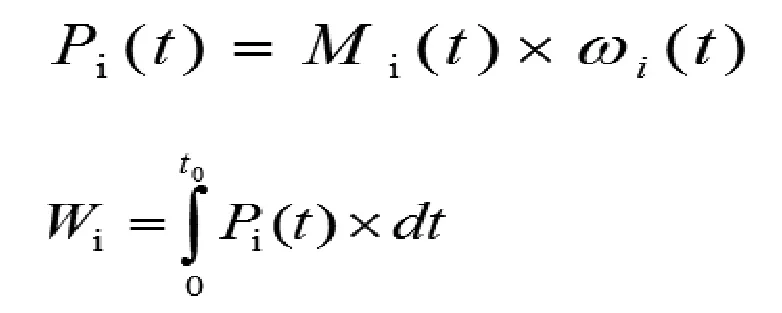
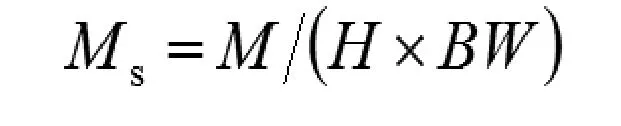
其中Mi(t)为时刻t时的关节净力矩,ωi(t)为关节运动角速度。为排除个体差异,对逆向动力学计算结果按照身高体重进行标准化处理,如计算关节力矩M,采用身高H(m)、体重BW(kg),标准化处理计算Ms如下:
为分析模型参数对计算过程中的敏感性,针对下肢单侧大腿、小腿两个环节的质量和重心位置4个模型参数,保持其他参数不变,人为改变单个参数,分别调整至±5%和±10%,即每个参数重复进行5次计算,分别对应该参数改变-10%、-5%、0%、+5%和+10%。对4个参数依次进行调整计算,比较动力学计算结果关节净力矩(Moment)和做功(Work)的标准化最大值(Max)、最小值(Min)和平均值(Mean)。为进一步观察参数对动力学计算结果的敏感性,定义敏感性为因变量(动力学指标)的变化量与自变量(模型参数)改变量的比值,即斜率,其意义为单位模型参数改变(1%)对动力学计算结果的影响(%),灵敏度计算方法如下:
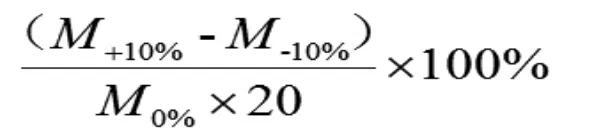
其中M+10%与M-10%分别为惯性参数增加10%和减小10%后的动力学计算结果,M0%为惯性参数保持不变计算的原始值。
2.6 统计处理
数据采用SPSS11.0软件进行统计,采用单因素方差分析(ANOVA),检验自变量(模型参数环节质心位置COM,环节质量Mass)对因变量(关节力矩Moment,关节做功Work最大值)的影响,统计显著性水平α取0.05。
3 研究结果
研究结果显示,下肢惯性参数改变直接引起动力学计算结果变化(图3)。其对下肢关节力矩和做功影响的绝对指标和相对指标见表1~8。

图3 大腿环节质量改变对下肢动力学计算的影响FFigure 33 Effect of the Change of Thigh Segment Mass on the Calculation of Lower Limb Dynamics

表1 大腿环节质心位置改变(%COM)对髋关节力矩和做功(绝对指标)的影响TableⅠ Effect of the Change of Thigh Segment COM (%COM) Position on the Torque and Work (absolute index) of Hip
由表2可见,大腿环节质心位置调整10%对髋关节力矩最大值的影响达到-0.49%到0.63%,而相应的改变导致力矩最小值的变化为24.3%;与大腿环节质心位置变化引起的误差相比,大腿环节质量的改变带来的影响更大(P<0.05,表9),参数10%的变化带来的误差达到-1.34%~1.31%(表4)。

表2 大腿环节质心位置改变(%COM)对髋关节力矩和做功(相对指标%)的影响Table Ⅱ Effect of the Change of Thigh Segment COM (%COM) Position on the Torque and Work (relative index%) of Hip
小腿环节质心位置改变(%COM)对膝、髋关节力矩和做功的影响方面,其参数10%的改变对较近膝关节的影响,无论是关节力矩还是关节做功,均小于0.4%(表6),而对较远的髋关节作用较弱,表现为对力矩的影响几乎为零(表6);小腿环节质量的改变对动力学计算的影响要大于同等百分比环节相对质心位置调整所带来的变化(P<0.05,表9)。
从参数的敏感度计算结果可以看出,在小腿质量变化条件下,除髋、膝关节做功变化无差异外,其他力矩和做功均有差异(P<0.05);由于比较时只考虑绝对值,从表9可以看出,在动力学计算过程中,无论是大腿还是小腿,环节质量的敏感性要高于环节相对质心位置(P<0.05)。

表3 大腿环节质量改变(%Mass)对髋关节力矩和做功(绝对指标)的影响TableⅢ Effect of the Change of Thigh Segment Mass (%Mass) on the Torque and Work (absolute index) of Hip
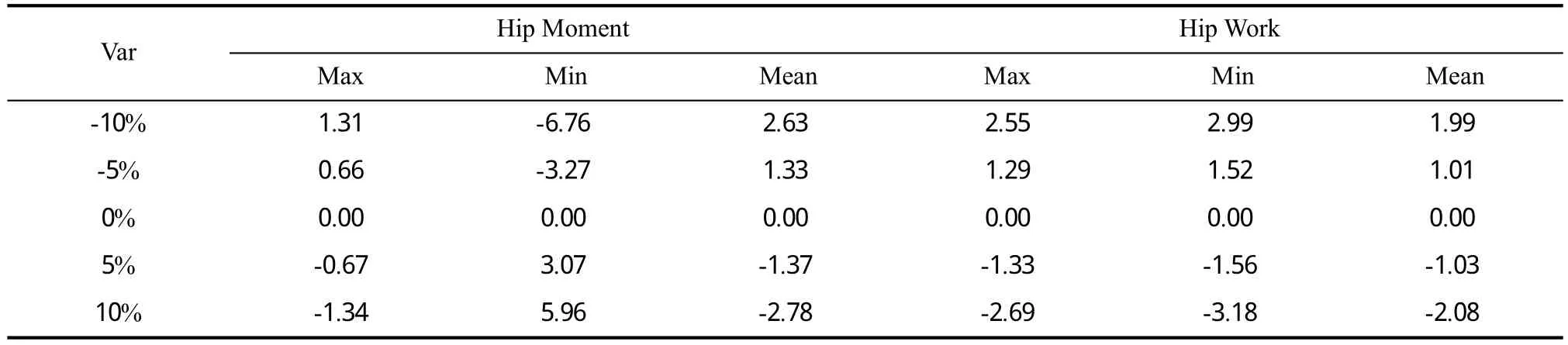
表4 大腿环节质量改变(%Mass)对髋关节力矩和做功(相对指标%)的影响TableⅣ Effect of the Change of Thigh Segment Mass (%Mass) on the Torque and Work (relative index%) of Hip

表5 小腿环节质心位置改变(%COM)对膝、髋关节力矩和做功(绝对指标)的影响TableⅤ Effect of the Change of Leg Segment COM (%COM) on the Torque and Work (absolute index) of Knee and Hip

表6 小腿环节质心位置改变(%COM)对膝、髋关节力矩和做功(相对指标%)的影响TableⅥ Effect of the Change of Leg Segment COM (%COM) on the Torque and Work (relative index%) of Knee and Hip
4 讨论与分析
本研究旨在探讨环节惯性参数改变对逆向动力学计算结果的影响,比较其敏感性。通过对纵跳下肢髋、膝关节力矩和做功的计算,具体分析大腿、小腿环节相对质心和环节质量的敏感性。
有研究结果表明,对于模型本身,即便模型计算时结合人体测量学相关影响因素,计算环节质量与质心位置偏差明显,而对不同人体模型的惯性参数进行比较,10%的偏差不足为奇[12]。本文改变人体惯性参数计算结果与之前学者研究不同模型结果相吻合[13]。研究结果中关节力矩、功率与做功与之前研究者结果[14]较一致,体现为数据量值、波形的相似。
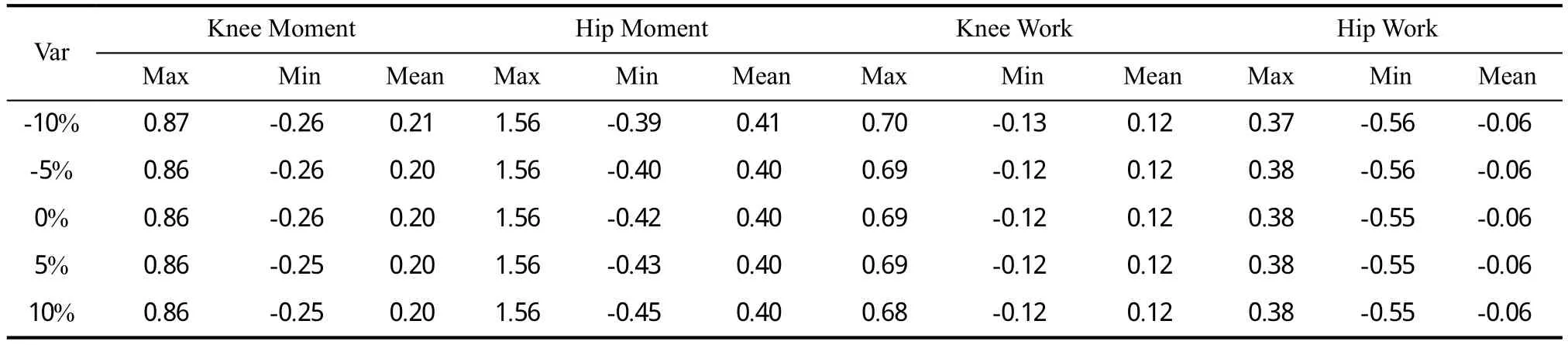
表7 小腿环节质量改变(% Mass)对膝、髋关节力矩和做功(绝对指标)的影响TableⅦ Effect of the Change of Leg Segment Mass (%Mass) on the Torque and Work (absolute index) of Knee and Hip
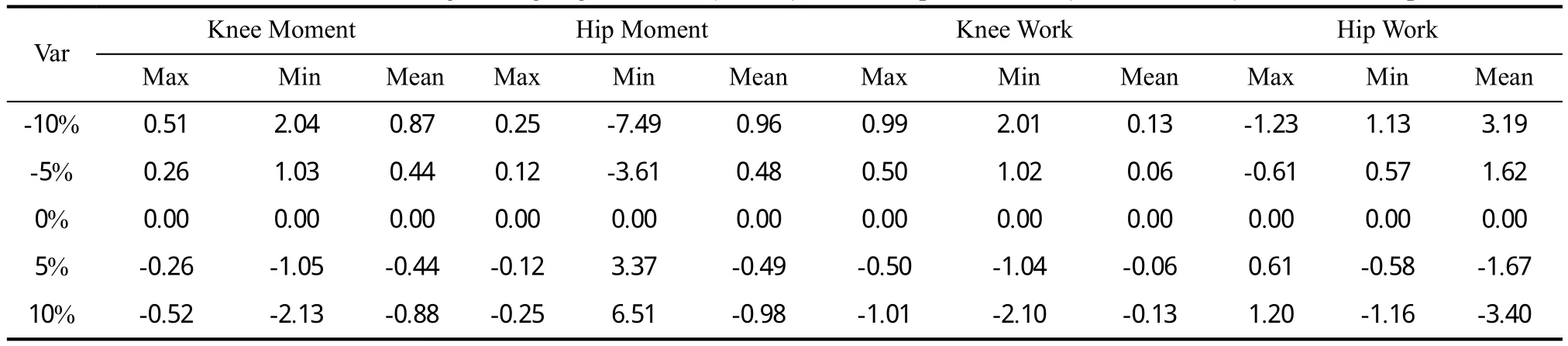
表8 小腿环节质量改变(%Mass)对膝、髋关节力矩和做功(相对指标%)的影响TableⅧ Effect of the Change of Leg Segment Mass (%Mass) on the Torque and Work (relative index%) of Knee and Hip

表9 惯性参数对动力学计算的敏感度(1%参数改变导致计算值变化的%)TableⅨ Sensitivity of Inertial Parameters on Dynamic Calculation (1% Parameter Change Results in the Change of Calculation)
从大腿环节惯性参数的变化对动力学计算的影响来看,其参数改变直接影响髋关节,由于逆向动力学计算方法结合地面反作用力,计算中自下而上,从踝关节向上反向计算,所以大腿环节惯性参数的改变并不影响膝关节计算结果。大腿相对质心参数10%的调整,对髋关节力矩最大值的影响程度达到-0.49%~0.63%,而相应的改变导致力矩最小值的变化可达到24.3%;与之相比,大腿环节质量的改变带来的影响更大(P<0.05),参数10%的变化带来的误差均大于1%。进一步比较参数的敏感性结果可得,大腿质量参数敏感度明显高于相对质心位置参数。
从小腿环节质心位置和环节质量变化对动力学计算结果的影响可以看出,小腿惯性参数的改变对膝关节动力学改变程度要大于髋关节,即对较近关节敏感度高于较远关节,产生此结果的原因可能是由于逆向动力学计算的顺序引起的,计算过程是从下往上逆向进行,说明惯性参数对动力传递链较近的关节作用效果最为明显。在参数的敏感性方面,与大腿环节参数敏感度相同,小腿环节质量参数的敏感度显著高于环节质心位置参数,在关节做功方面,参数同等百分比变化,前者带来的计算误差几乎为后者的两倍。提示在动力学计算中,在选择人体惯性参数模型时,可以首先考虑环节质量分部与受测对象较接近的模型,而在人体惯性参数的测量时,环节相对质量的精确度有待提高。
虽然惯性参数除了环节相对质心位置和环节质量外,还包括环节转动惯量,为了独立出单个影响因素,本文只比较了前者的敏感性,而实际在完整的动力学系统中,环节的相对质心位置及环节质量的改变,都将导致环节转动惯量的改变。从这一点出发,环节质心位置或者环节质量的改变,与伴随的环节转动惯量变化,综合的叠加作用可能使实际动力学计算结果的偏差更大。
下肢环节包括大腿、小腿和足,本文只计算大腿和小腿惯性参数改变所带来的影响,并未计算足部,其主要的原因在于分析不同模型[1,12,15-18]时发现,由于测量的标准和种族等因素的不同,足部的惯性参数偏差太大,甚至超过40%。
为丰富人体环节惯性参数的研究,一些研究者将运用数学模型,将身体环节模拟成近似的几何体,如球体、圆柱、圆锥等[18]。首先使用此方法的是Hanavan[18],模型将人体分为15个密度均匀的刚体,此模型的优点是所需的参数较少,容易进行测量与运用。但是模型中环节被定义为刚体,环节边界划分明显,环节密度均匀,而实际运动中,由于软组织的相对运动,环节边界的模糊性和体成分的不均衡性都将导致计算结果的偏差。这也直接导致逆向动力学计算结果的偏差。Chen等运用运动捕捉系统与两个测力台,通过模型优化,得到不同静态动作中模型压力中心与测力台实测压力中心差值的优化解,拟算个体化的化解环节惯性参数[19]。所以利用标准而常用的生物力学测量设备、设计更为容易的精准计算个体化的环节惯性参数方法,有利于精确的动力学计算。
5 结论
下肢惯性参数改变对逆向动力学计算结果的影响不可忽略;环节惯性参数对动力链较近关节影响最大;环节质量参数对逆向动力学计算的敏感度显著高于环节相对质心位置参数的敏感度。
[1] GB-T 17245-2004 成年人人体惯性参数[S].
[2] Larish D, Martin P, Mungiole M. (1987). Characteristic patterns of gait in the healthy old[J]. Ann New York Acad Sci 515:18–32.
[3] Myers M, Struedel K. (1985). Effect of limb mass and its distribution on the energy cost of running[J]. J Exp Biol 116:363–73.
[4] Pate RR, Macera CA, Bailey SP, Bartoli WP, Powell KE. (1992).Physiological, anthropometric, and training correlates of running economy[J]. Med Sci Sports Exerc, 24:1128–33.
[5] Feltner, M.E., Frasceti, D.J., Crisp, R.J. (1999). Upper extremity augmentation of lower extremity kinetics during countermovement vertical jumps[J]. Journal of Sports Sciences, 17(6):449–466.
[6] Winter, (1990). D.Biomechanics and Motor Control of Human Movement[M]. Wiley-Interscience, Toronto, Ontario.
[7] Pearsall DJ, Costigan PA. (1999). The effect of segment parameter error on gait analysis results[J].Gait Posture,9(3):173-83.
[8] 郑亦华,叶永延.影响起跳效果诸因素的生物力学研究[J].体育科学,1983,(2):68-73.
[9] Clark, N. C. (2001). Functional performance testing following knee ligament injury[J]. Physical Therapy in Sport, 2(2):91-95.
[10] Hopper, D. M., Strauss, G. R., Boyle, J. J., & Bell, J. (20080.Functional recovery after anterior cruciate ligament reconstruction:a longitudinal perspective[J]. Archives of Physical Medicine &Rehabilitation, 89(8):1535-1541.
[11] 王旸,牛文鑫,何艳,裴葆青,樊瑜波.面向逆向动力学仿真驱动和验证的半蹲式跳伞着陆实验研究[J].医用生物力学,2010,25(4):257-272.
[12] Chandler RR, Clauser CE, Mcconville JT, et.al. (1975).Investigation of inertial properties of the human body. AMRLTR-74-137.
[13] Rao G, Amarantini D, Berton E,et.al. (2006). influence of body segments' parameters estimation models on inverse dynamics solutions during gait[J]. J Biomech, 39(8):1531–1536.
[14] Mikiko Haraa, Akira Shibayamab, Daisuke Takeshita et.al.(2006). The effect of arm swing on lower extremities in vertical jumping[J]. J Biomech. 39(13): 2503–2511.
[15] Dempster WT. (1955). Space requirement of the seated operator.WADC-TR-55-159.
[16] Chen SC, Hsieh HJ, Lu TW, Tseng CH. (2011). A method for estimating subject-specific body segment inertial parameters in human movement analysis[J].Gait Posture, 33(4):695-700.
[17] Clauser CE, McConville JT, Young JW. (1969). Weight, volume and center of mass of segments of the human body. AMRLTDR-69-70.
[18] Cahouet, V., Martin, L., Amarantini, D. (2002). Static optimal estimation of joint accelerations for inverse dynamics problem solution[J]. J Biomech, 35(11):1507-1513.
[19] Cheng CK, Chen HH, Chen CS, et.al. (2000). Segment inertial properties of Chinese adults determined from magnetic resonance imaging[J].Clin Biomech. 15(8):559-66.
[20] McGibbon CA, Krebs DE. (1998). The influence of segment endpoint kinematics on segmental power calculations[J].Gait Posture, 7(3):237-242.
[21] De Leva P. (1996). Adjustments to Zatsiorsky–Seluyanov’s segment inertia parameters[J]. J Biomech, 29(9): 1223–1230.
[22] Durkin JL, Dowling JJ. (2003). Analysis of body segment parameter differences between four human populations and the estimation errors of four popular mathematical models[J]. J Biomech Eng,125(4):515-22.
[23] Jensen RK. (1993). Human morphology: its role in the mechanics of movement[J].J Biomech, 26(1):81-94.
[24] Jensen RK, Fletcher P. (1994). Distribution of mass to the segments of elderly males and females[J].J Biomech. 27(1):89-96.
[25] Hanavan, E.P. (1964). A Mathematical Model of the Human Body.Aerospace Medical Division, Ohio, 64–102.
[26] Holden JP, Stanhope SJ. (1998). The effect of variation in knee center location estimates on net knee joint moments[J].Gait Posture, 7(1):1-6.
[27] Yeadon MR, Morlock M. (1989). The appropriate use of regression equations for the estimation of segment inertia parameters[J]. J Biomech,22:683–9.
[28] Zatsiorsky V, Seluyanov V. (1985). Estimation of the mass and inertia characteristics of the human body by means of the best predictive regression equations[C]. In: Winters DA, Norman RW,Wells RP, et al., editors. Biomechanics IX-B. Cham- pagne, IL:Human Kinetics, 233–9.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化·教与学(2019年5期)2019-06-06
汽车实用技术(2017年20期)2017-10-24
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
中学生数理化·高三版(2017年3期)2017-04-21
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
