
国外航天器在轨捕获技术综述
2013-12-29 04:14:02李新刚裴胜伟
航天器工程 2013年1期
李新刚 裴胜伟
(中国空间技术研究院,北京 100094)
1 引言
长寿命、高可靠是新一代地球静止轨道(GEO)卫星平台的重要特征,而其推进剂装填量则是制约卫星寿命的主要因素。欧洲航天局(ESA)对地球静止轨道目标的分类报告统计数据表明,2008年有10颗在轨地球静止轨道通信卫星因燃料耗尽而寿命终止,2010年此数量增加到16 颗,其中仅11颗正常离轨,未来十年内地球静止轨道卫星年失效数量仍将保持快速增长态势。在轨延寿与离轨技术是通过发射延寿飞行器与失效卫星对接,采用辅助控制或燃料加注等方法,恢复其姿轨控能力并延长其寿命,对无延寿价值的卫星则将其推离轨道,因此,在轨延寿与离轨技术对于增加地球静止轨道卫星运行效益及保护静止轨道资源具有重要作用。
在轨延寿与离轨技术的关键是延寿飞行器自主捕获目标卫星并实现刚性连接,由于目标卫星既可能是合作目标,又可能是非合作目标,还可能是失效卫星,延寿飞行器的在轨捕获方案中,必须充分考虑对目标卫星的相对测量精度、自主交会与捕获能力、捕获机构的通用性以及较高的误差冗余能力和高可靠性等重要因素。本文主要针对国外地球静止轨道延寿飞行器的在轨捕获方案,进行了归纳和比较分析,目的是跟踪在轨捕获技术的发展趋势,为我国开展该领域的研究工作提供参考。
2 国外在轨捕获技术
迄今为止,在轨捕获机构设计方案主要有如下三种形式:利用伸缩杆捕获目标卫星的发动机喷管;利用飞网或飞爪捕获目标卫星;利用机械臂捕获目标卫星的特定结构。
2.1 伸缩杆捕获方案

图1 CX-OLEV 的在轨捕获示意图Fig.1 On-orbit capture of CX-OLEV
美国轨道复活公司(ORC)和英国轨道复活有限公司(ORL)共同研制了一种名为锥型车-轨道延寿飞行器(CX-OLEV)[1-2],CX-OLEV 可以同三轴稳定的地球静止轨道卫星相结合,取代原卫星的姿态和轨道控制系统,能为质量在3000kg以下的卫星延长10 年工作寿命。CX-OLEV 飞行器充分利用了目标卫星的远地点发动机喷管和星箭对接环的结构特点,设计通用型对接捕获机构(图1)。其捕获对接机构由两部分组成:一部分是远地点发动机喷嘴的捕获机构,其主体结构为双杆可膨胀捕获装置,由可伸缩双丝杆机构和机械固定机构组成,在CX-OLEV 沿目标卫星发动机喷嘴轴线方向足够靠近目标时,双丝杆机构在驱动马达的作用下便沿轴线方向伸展,将可膨胀捕获装置送入目标卫星的发动机喷嘴内部,随后,可膨胀结构展开并实现与目标星的连接;另一部分是三套独立的星箭对接环锁紧机构,沿CX-OLEV 的对接面圆周方向呈120°的等角距分布,锁紧机构在执行任务之前呈折叠状态,当捕获机构将两航天器距离缩小到锁紧机构的作业距离范围之内时,锁紧机构打开,并捕获目标卫星的星箭对接环,两个相配合的锁紧钩分别从对接环内部和外部收紧,当锁紧机构完成锁紧之后,两星之间的相对位置和姿态即被确定。
欧洲轨道卫星服务公司(OSSL)利用欧洲航天局灵巧-1(Smart-1)卫星平台,开发灵巧-轨道延寿飞行器(SMART-OLEV)[3],为地球静止轨道通信卫星提供延寿服务。SMART-OLEV 采用了CXOLEV 的延寿技术,也是利用目标卫星的远地点发动机喷管和星箭对接环进行在轨捕获(图2)。

图2 SMART-OLEV 的在轨捕获示意图Fig.2 On-orbit capture sketch of SMART-OLEV
2011年,美国空间有限责任公司和阿联特技术系统公司(ATK)宣布成立维维卫星公司(ViviSat),针对地球静止轨道卫星开展在轨延寿业务。目前该公司提出了任务延寿飞行器(MEV)设计方案(图3),MEV 飞行器能与目标卫星交会对接和锁紧,为其提供备份推进系统功能或执行离轨操作。

图3 ViViSat公司的MEV在轨延寿系统在轨捕获示意图Fig.3 On-orbit capture sketch of MEV life extend system by ViViSat Corp.
2.2 机械臂捕获方案
为实现奥林匹斯(Olympus)卫星和Anik-E卫星的在轨修复,1994年欧洲航天局提出了地球静止轨道服务飞行器(GSV)的研究计划[4-7],GSV 将空间机械臂作为执行机构,方案设计阶段提出了单机械臂和双机械臂的配置方案,如图4所示。GSV 主要以目标星的轨控发动机喷嘴和对接环为捕获接口。
试验卫星服务系统(ESS)是ESA 开展的另外一个地球静止轨道卫星在轨服务系统研究项目[8],目标是将遥控空间机械臂ROTEX 中已经验证的遥机械臂思想用于卫星在轨服务,ESS 以GEO 故障卫星为目标,将其远地点发动机圆锥形喷管作为捕获目标。ESS飞行器的六自由度机械臂系统重70kg,长4.5m,借助于实时视频图像、6 个激光测距仪和力传感器,自动捕获目标卫星的远地点发动机。针对失效的电视卫星-1(TV-Sat-1),利用ESS进行在轨修复的方案设想如下(图5):ESS接近TV-Sat-1卫星直到可捕获范围,移动机械臂跟踪并插入远地点发动机喷管,捕获目标卫星后通过对接机构与TV-Sat-1卫星对接,机械臂可从喷管中抽出,通过机械臂末端的工具交换,展开TV-Sat-1卫星的太阳翼并拉伸被卡住的天线。

图4 GSV 系统捕获机构布局示意图Fig.4 Single and double arm capture mechanism layout sketch of GSV system

图5 ESS系统Fig.5 ESS
1997年,日本发射了工程试验卫星-7(ETSVII),进行空间自主交会对接和机械臂操作关键技术验证[9],ETS-VII系统由服务星和目标星组成,六自由度的空间机械臂安装在服务星上,ETS-VII系统入轨后,成功实现了服务星和目标星的分离和在轨捕获(图6)。

图6 ETS-VII系统的在轨捕获对接示意图Fig.6 On-orbit capture and docking sketch of ETS-VII
德国航空航天研究院(DLR)与俄罗斯联合开展了空间系统演示与验证技术卫星(TECSAS)项目[10],目标是进行先进的空间维护与服务关键技术的在轨演示验证,特别是对接和基于机械臂的捕获技术(图7)。俄罗斯的多用途轨道推进平台提供轨道转移和交会对接的机动,DLR 提供机械臂系统完成在轨捕获。
加拿大的麦克唐纳·迪特维利联合有限公司(MDA)为“国际空间站”研制了先进的空间机械臂系统,采用该机械臂系统,宇航员在1992年成功捕获并修复了国际通信卫星-1(Intelsat-1),此外该系统还参与了哈勃号望远镜的修复工作。MDA 公司提出了利用空间机械臂对地球静止轨道寿命末期卫星进行燃料加注延寿的设想(图8),首先利用空间机械臂抓捕目标卫星远地点发动机喷管,然后打开目标卫星的注排阀门,最后插入软管泵入适量燃料,此外,此系统还具备一些简单的维修功能,能够排除诸如太阳翼展开等故障。
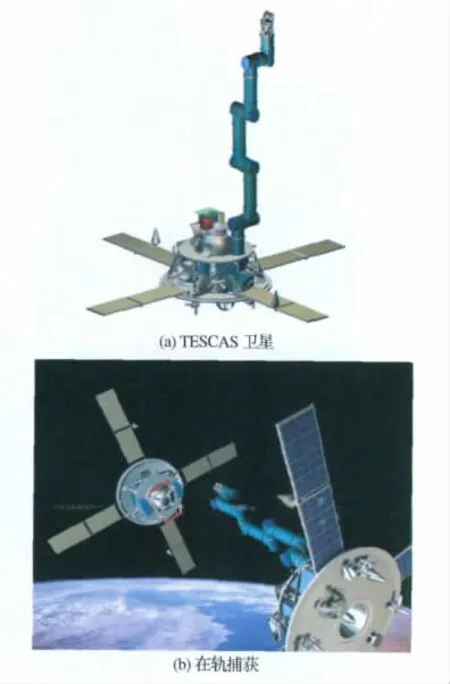
图7 TECSAS在轨捕获示意图Fig.7 On-orbit capture sketch of TECSAS

图8 MDA 公司的GEO 在轨延寿系统在轨捕获示意图Fig.8 On-orbit capture sketch of GEO life extension system by MDA Corp.
美国国防预先研究计划局(DARPA)发起了全能轨道操纵飞行器(SUMO)/前端机器人使能近期演示验证(FREND)项目[11-14],对地球静止轨道卫星的在轨服务可行性进行验证。FREND 的设计方案中不需要目标飞行器提供特定抓捕装置和反射标志,可直接服务于A2100、BSS601、BSS702 以及LS1300等大型GEO 卫星平台。SUMO 在设计中采用多支机械臂与视频立体成像相互配合,利用目标卫星的星箭连接口(如适配器对接环及其螺栓孔)进行捕获,具有较强的自主交会与捕获能力。以SUMO 捕获“宽带全球通信卫星”(WGS)为例(图9):当SUMO 和WGS 卫星的相对距离小于1.5m 时,SUMO 的机械臂开始工作,机械臂上的末端作动器伸入到WGS卫星与运载火箭适配器连接的螺栓孔之中,张开螺栓孔钳以锁死连接,同时机械臂将进入“固化”状态,实现SUMO 和WGS卫星的刚性连接。
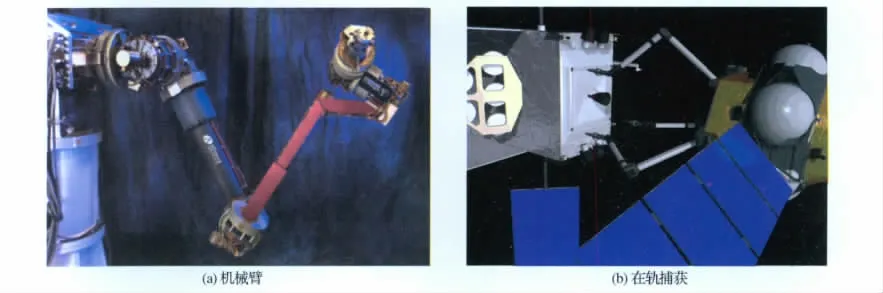
图9 FREND/SUMO 的在轨捕获示意图Fig.9 On-orbit capture sketch of FREND/SUMO
2.3 飞网或飞爪捕获方案
ESA 自2001年提出了用飞网抓捕地球静止轨道废弃卫星的自主地球静止轨道回收器(ROGER)项目[15-16]。ESA 计划利用ROGER 系统开展以下两方面研究:利用ROGER 飞网抓捕机构清除地球同步轨道上的失效卫星,并转移到坟墓轨道;利用ROGER 绳系飞爪抓捕未进入正常轨道的地球同步轨道卫星,并将其送入预定工作轨道,如图10所示。

图10 ROGER 系统的在轨捕获示意图Fig.10 On-orbit capture sketch of ROGER System
3 在轨捕获技术分析
综上所述,欧美各国在地球静止轨道延寿飞行器方案中采用的在轨捕获技术特点如表1所示。
从表1中可以看出采用机械臂进行在轨捕获的技术发展潜力最大,是当今研究在轨捕获的主流技术,该技术的主要特点如下:
(1)灵活、多任务支持能力。目标卫星既有保持对地定向的健康卫星,也有处于翻滚状态的故障卫星,需要提供的服务包括延寿、离轨和维修等任务。其中最具有价值的在轨服务是修复那些部分功能失效的卫星,如天线或太阳翼未完全展开等情况,因此在轨捕获方案的选择应将在轨维修任务需求放在首位,上述三类方案中只有机械臂形式能够充分满足这一需求。
(2)适应目标能力强,对目标无特定接口要求,支持非合作卫星捕获。目前国内外卫星平台设计各异,尚未有国际化的标准接口规范,采用机械臂形式,可根据卫星的结构特点灵活确定卫星的捕获位置。目前在轨的卫星绝大部分为非合作目标,通过机械臂可以设计各种捕获方案,使用更加灵活。
(3)相对位置及姿态的测量和控制误差冗余能力强,系统安全性高。具有多自由度和柔性的机械臂可与目标卫星柔性对接,从而降低与目标卫星之间的冲击,容许捕获过程中存在较大的位置和姿态误差,此外设计较长的机械臂,也可以确保与目标之间保持一定的安全距离。

表1 国外典型在轨捕获技术对比Table 1 Comparison of abroad typical on-orbit capture technologies
(4)技术发展迅速,相关技术已在轨应用。机械臂的机构设计、驱动控制、动力学建模等技术在非航天领域发展迅速,这些技术通过空间环境适应性改造可以用于在轨捕获。空间机械臂作为“国际空间站”的核心部件,已完成了大量的在轨组装任务。可见机械臂虽结构复杂,但相关技术的支撑性非常好。
研究和分析在轨捕获过程的动力学特性也尤为关键,捕获过程的动力学模型建模需要同时考虑相对轨道运动、相对姿态运动和捕获机构的运动,还应考虑捕获时可能发生的刚性碰撞动力学过程。精确的动力学模型可以用来验证相对轨道与姿态运动控制算法、捕获对接规划策略以及交会避撞策略等。验证捕获对接动力学模型正确性和运动控制算法可以开展地面半物理试验,采用气浮平台创建一个无摩擦的平面仿真环境,如美国斯坦福大学的双臂自由飞行空间机器人系统,日本大阪大学的空间机器人实验系统,以及加拿大空间站遥操作机械臂系统(SRMS)的地面实验系统。
国内对新兴的基于空间机械臂技术的在轨服务技术越来越重视,为了满足未来空间站在轨组装、航天器在轨维护等任务的技术需求,我国已开展了空间机器人的研制工作,多项技术取得突破,如建立了大型六自由度空间交会地面仿真实验系统,研制了一批空间目标相对测量设备,完成了空间机械手抓捕执行机构原型样机研制,成功进行了飞船与空间实验室交会对接等,这些研究成果均可用于机械臂在轨捕获技术的发展。此外,由于国内在轨服务技术的研究以低轨航天器为主,针对高轨卫星的研究较少,建议对高轨和低轨空间环境差异、卫星设计差异、轨道姿态控制差异等进行深入分析,通过适应性改进,将低轨卫星的在轨服务技术用于高轨卫星,以此加快推动高轨卫星在轨服务技术早日进入应用阶段。
4 结论
欧美各国针对地球静止轨道卫星的在轨延寿需求,提出了各种各样的延寿飞行器方案,其中在轨捕获机构主要有如下三种形式,利用伸缩杆捕获目标卫星的发动机喷管,利用飞网或飞爪捕获目标卫星以及利用机械臂捕获目标卫星的特定结构。通过对比分析,采用机械臂捕获机构,捕获时机械臂的空间运动自由度较高,可以对目标卫星的多个部位进行捕获,还可以利用机械臂对故障卫星进行在轨维修,因此,这种机械臂捕获机构在目前延寿飞行器方案中采用的最多,通用性和误差冗余能力均比较好。国内空间机器人技术的进展迅速,我国在开展地球静止轨道延寿飞行器的方案设计时,可采用通用性好的空间机械臂作为在轨捕获机构,以满足在轨延寿、离轨和在轨维修等任务需求。
(References)
[1]Dennis R W.Orbital recovery’s responsive commercial space tug for life extension missions,AIAA 2004-6118[C]//Space 2004Conference and Exhibit.Washington D.C.:AIAA,2004
[2]Tarabini L,Gil J.Ground guided CX-OLEV rendezvous with uncooperative geostationary satellite[J].Acta Astronautica,2007(61):312-325
[3]Kaiser C,Sjoberg F.SMART-OLEV—an orbital life extension vehicle for servicing commercial spacecrafts in GEO[J].Acta Astronautica,2008(63):400-410
[4]Yasaka Tetsuo,Yasui Yoshitsugu.Geostationary Service Vehicle(GSV)for economical on-orbit servicing,IAF-89-686[C]//40th Congress of IAF.Paris:IAF,1989
[5]Brown D L,Guenther H J.A geostationary service vehicle concept,IAF-94-4563[C]//45th International Astronautical Congress.Paris:IAF,1994
[6]Guenter H,Anders C.Prospects of a geostationary service vehicle,AIAA 94-4563[C]//Space Programs and Technologies Conference. Washington D.C.:AIAA,1994
[7]Kimura Shinichi,Tuchiya Shigeru.Fault-adaptive Kinematic control of a hyper-redundant manipulator system for a GSV,IAF-95-A709[C]//46th International Astronautical Congress.Paris:IAF,1995[8]Hirzinger G,Brunner B.Advances in orbital robotics[C]//Proceeding of the 2000IEEE International Conference on Robotics and Automation. New York:IEEE,2000:898-907
[9]Reintsema D,Landzettel K,Hirzinger G.DLR’s advanced tele robotic concepts and experiments for onorbit servicing[J].Springer Tracts in Advanced Robotics,2007(31):323-345
[10]Bernd S.Unmanned On-orbit Servicing (OOS)-A roadmap to the future,ROKVISS and the TECSAS mission,IAC-05-D3.2.02[C]//56th International Astronautical Congress.Paris:IAF,2005
[11]Debus T J,Dougherty S P.Overview and performance of the front-end robotics enabling near-term demonstration (FREND)robotic arm,AIAA 2009-1870[C]//Aerospace Conference and Exhibit and AIAA Unmanned Unlimited Conference. Washington D.C.:AIAA,2009
[12]Kelm B E,Angielski J A.FREND:pushing the envelope of space robotics,OMB 0704-0188[R].NRL Review.Washington D.C.:NAVAL,2008
[13]Bosse A B,Barnds W J.SUMO:spacecraft for the universal modification of orbits,SPIE-5419[C]//Spacecraft Platforms and Infrastructure.Bellingham:SPIE,2004
[14]Obermark J,Creamer G.SUMO/FREND:vision system for autonomous satellite grapple,SPIE-65550-9[C]//International Society for Optical Engineering Sensors and Systems for Space Applications.Bellingham:SPIE,2007
[15]Kassebom M,Koebel D.ROGER—an advanced solution for a geostationary service satellite,IAC-03-U.1.02[C]//54th International Astronautical Congress of the International Astronautical Federation.Paris:IAF,2003
[16]Bischof B,Kerstein L.ROGER robotic geostationary orbit restorer[J].Science and Technology Series,2004,109:183-193
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
国外核新闻(2022年3期)2022-02-17 19:03:45
活力(2021年4期)2021-07-28 05:34:08
空间科学学报(2020年6期)2020-07-21 05:37:04
空间科学学报(2020年6期)2020-01-08 16:50:22
环球时报(2019-12-05)2019-12-05 05:13:15
电子制作(2018年2期)2018-04-18 07:13:25
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
太空探索(2014年4期)2014-07-19 10:08:58
太空探索(2014年5期)2014-07-12 09:53:27
