
卫星遥感多路数据传输合路方案研究
2013-12-29 04:14:00朱红康骊张爱兵
航天器工程 2013年1期
朱红 康骊 张爱兵
(1 空间电子信息技术研究院,西安 710100)
(2 北京航空航天大学电子信息工程学院,北京 100191)
1 引言
数据处理与传输系统(简称数传系统)是遥感卫星上的重要有效载荷,承载着遥感数据的星地传输任务,其工作流程主要是从星上遥感载荷获取到观测数据开始,经压缩编码、数传合路、信道编码、调制、功率放大、空间辐射、射频接收、解调、译码等一系列处理,到最终恢复出遥感数据。
数传合路技术是数传中的一项关键技术,其方案设计遵循空间数据系统咨询委员会(CCSDS)制订的高级在轨系统(Advanced Orbiting Systems,AOS)[1-5]标准,主要技术特征是采用虚拟信道(Virtual Channel,VC)机制,对输入的多路载荷数据进行标准化的打包和标识,形成等长的虚拟信道数据单元(Virtual Channel Data Unit,VCDU),使用虚拟信道动态调度策略[6]完成VCDU 的复接[7-8],实现多用户数据在同一空间物理信道上的共享传输。由于各路虚拟信道数据的特性不同,需要在入口端设置独立的数据缓存,以适应与虚拟信道调度过程的不同步。
2 遥感数传设计
2.1 数据接口设计
某遥感卫星的高分辨率相机输出8路电荷耦合器件(CCD)的图像数据(CCD1~CCD8),相机采用推扫方式成像,图像数据按行送出,每行包括图像辅助数据和图像数据,其中图像辅助数据不压缩。相机/数传之间的数据接口如图1所示。相机图像数据通过压缩编码处理后形成压缩码流,再通过数传合路单元处理后形成两路组帧数据流,送空间物理信道下传。数传采用四相相移键控(QPSK)调制方式,于是两路组帧数据流分别作为QPSK 调制器的I路输入数据(In-phase,同相分量)和Q 路输入数据(Quadrature,正交分量)。
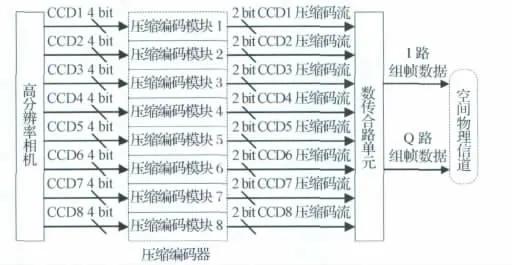
图1 相机/数传之间数据接口Fig.1 Data interface between camera and data transmission system
压缩编码器的每个模块独立接收和处理1 路CCD 图像,采用条带压缩方式和基于小波的分层树集合分裂编码(Set Partitioning in Hierarchical Trees,SPIHT)[10]压缩算法,将数据率降低到数传带宽范围内,同时减小误码扩散影响,并确保重建图像质量满足任务需求。为抵御信道误码,确保数据传输质量,对图像压缩数据采用RS(255,243)纠错编码,并同图像辅助数据进行拼接,形成压缩码流后输出,输出数据信号时序如图2所示。图2中,参数T、Tz、Tn表示门控信号的周期、正程长度、逆程长度,单位均为ms。参数xd和zd均表示局部的有效数据传输长度,参数yd表示间歇期长度,参数nd表示yd和zd的重复次数,xd、yd、zd的单位均为byte。在正程区域内传输有效数据(有效数据量=xd+nd·zd),逆程为空闲期。各参数取值为T=17.7、Tz=14.633 5、Tn=3.066 5、xd=2048,yd=384,zd=255,nd=180。
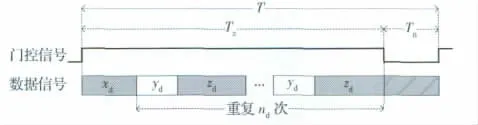
图2 压缩编码器输出数据信号时序Fig.2 Output data signal timing of compression encoder
数传合路单元接收多路压缩码流,采用CCSDS AOS标准编码技术完成多路高速复接,整合成码速率恒定的I、Q 路组帧数据流,送入星地物理信道传输。按照CCSDS 协议分层模型,压缩码流数据属于空间链路层(Space Link Sub-network,SLS)中的非定界位流数据(Bit streaming)。SLS层又划分为两个子层:虚拟信道链路控制子层(Virtual Channel Link Control sublayer,VCLC)和虚拟信道访问子层(Virtual Channel Access sublayer,VCA)。VCLC子层完成载荷及其压缩数据位流的组织;VCA 子层完成虚拟信道的复用和组帧。数传合路单元处于SLS 层与空间物理信道(space physical channel)之间,采用位流协议数据单元(Bitstream Protocol Data Unit,B-PDU)组织数据帧。
2.2 传输帧结构设计
使用统一的传输帧结构实现多路压缩码流的共享信道传输,首先将输入的压缩码流数据放入BPDU 数据域形成B-PDU 数据单元,对B-PDU 数据单元分配虚拟信道形成VCDU 数据单元,对VCDU数据单元进行高速复接和组帧,对帧格式的重要区域进行RS纠错编码,填入RS校验信息形成编码虚拟信道单元(Coded Virtual Channel Data Unit,CVCDU),再经伪随机化和添加同步码,最终形成信道访问数据单元(Channel Access Data Unit,CADU)下行传输帧。CADU 传输帧的帧长度和BPDU 位流数据区长度是数传码速率设计所需的两个重要控制参数。
2.3 数传码速率设计
确定传输帧结构后需要进一步确定虚拟信道数据对传输带宽的需求,并以此为依据设计一个固定的数传码速率,以适应空间物理信道传输和地面接收端同步处理需要。采用式(1),可算出单路CCD图像数据传输所需的码速率ri(Mbit/s)
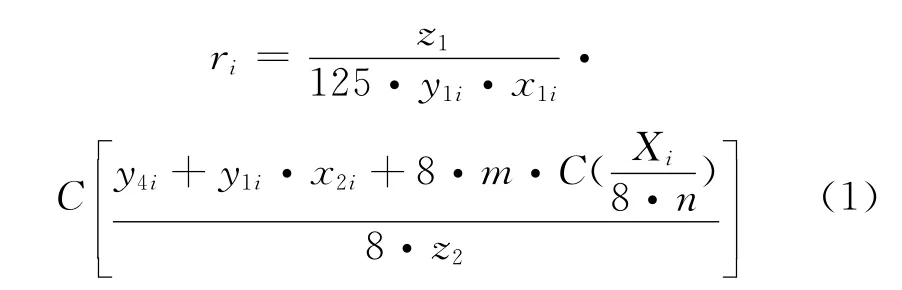
式中:i表示CCD的序号;x1i,x2i表示CCD图像行周期(ms)、每行包含的辅助数据量(bit);y1i,y4i表示压缩条带包含的行数、条带压缩包格式开销(bit);m,n表示对条带压缩数据进行RS纠错编码采用的分组长度(byte)、信源长度(byte);z1,z2表示CADU 传输帧的帧长度(byte)、B-PDU 位流数据区长度(byte);中间变量Xi表示对单个条带进行图像压缩后所得的数据量(bit);函数C(x)表示将变量x向上舍入为最接近的整数。采用式(2),可算出Xi

式中:x3i,x4i表示每行包含的像元数量、像元量化位数(bit);y2i,y3i表示数据压缩比、压缩数据量浮动率;函数C(x)表示将变量x向上舍入为最接近的整数。
式(1)、(2)中,参数取值为x1i=0.276 562 5,x2i=256,x3i=4096,x4i=8,y1i=64,y2i=6,y3i=0,y4i=16,m=255,n=243,z1=1066,z2=1024。代入式(1)可得ri=22.645 Mbit/s,于是8 路CCD 图像数据传输所需的数传码速率r=8·ri=181.16 Mbit/s。数传码速率R设计为190Mbit/s,设计余量为R-r=8.84Mbit/s,设计裕度为(R-r)/R=4.65%。设计裕度是以在数传组帧数据流中插入填充帧的形式表现出来的,它在数值上同填充帧率的统计平均值相当。
3)迭代运算单元内部逻辑折叠共享:由算法流程可知,符号判决之后需要进行加或减操作,设计中即使采用寄存器共享也需要6个加法器来实现算法,然而通过分析可以发现:同一时刻仅有3个加法器处于工作状态,这样可以复用加法器来减少逻辑资源,如图3所示。
2.4 数传合路方案设计
在数传合路处理前,首先对各路虚拟信道数据进行独立的缓冲存储。缓存的容量用位宽和深度度量,位宽指一次读/写操作的比特位数,深度指最多可存储多少个数据位宽的数据量。只要确定了虚拟信道数据传输对相应缓存深度的需求值,就等于确定了对缓存容量的需求值。缓存的数据位宽为8bit,因此先将压缩码流数据位宽由2bit转换成8bit后再存入缓存。缓存的输入、输出端分别使用异步时钟(时钟频率为32 MHz)、同步时钟(时钟频率为95 MHz)控制模式。各路虚拟信道输入信号中的有效数据独立写入相应的缓存,输出端在同步时钟驱动下利用帧格式同步计数器作为状态机,以计数值为同步控制信号完成缓存状态判断、虚拟信道传输时隙分配、缓存数据读取,以及CADU 组帧等一系列操作。对8路CCD 压缩码流进行数传合路处理时,本文设计了两种备选方案。为便于表述,各路CCD 及其虚拟信道(VC)的对应关系约定为CCDk→VCk(k为整数,1≤k≤8)。
第一种数传合路方案如图3所示,各路CCD 压缩码流数据经位宽转换后,送入相应的先进先出数据缓存器(FIFO)进行缓存,然后在虚拟信道调度管理程序的控制下,将VC1~VC8数据同时数传合路到I帧和Q 帧中。每从某路缓存读出8bit数据后,就将其拆分为高4bit和低4bit,高4bit嵌入到I帧传输,低4bit嵌入到Q 帧传输。于是在任意一个传输帧时隙,同步的I帧和Q 帧均传输了同一个虚拟信道的数据,且分别包含了该虚拟信道的一半数据量。
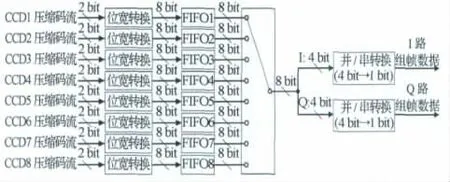
图3 第一种数传合路设计方案Fig.3 First multiplexing scheme
第二种数传合路方案如图4所示,各路CCD 压缩码流数据经位宽转换后,送入相应的FIFO 进行缓存,然后在虚拟信道调度管理程序的控制下,将VC1~VC4数据数传合路到I帧,每从VC1~VC4中的某路缓存读出8bit数据后,不做拆分,直接嵌入到I帧传输。将VC5~VC8数据数传合路到Q 帧,每从VC5~VC8中的某路缓存读出8bit数据后,不做拆分,直接嵌入到Q 帧传输。于是在任意一个传输帧时隙,同步的I帧和Q 帧传输的虚拟信道不同(不算保留的填充帧)。以下对数传合路方案的缓存需求进行定性分析。
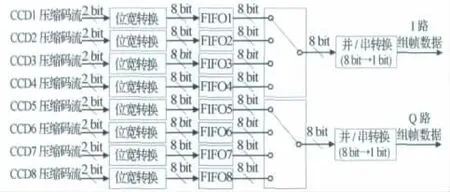
图4 第二种数传合路设计方案Fig.4 Second multiplexing scheme
为缓解缓存中数据的大量积压,数传合路方案采用了基于剩余量优先的虚拟信道调度策略,即对缓存数据存取深度取最大值的虚拟信道进行优先处理。为便于简洁地描述和分析缓存数据存取深度的动态变化情况,引入变量Dk(t)、Mk(t)、Dk、Tk。Dk(t)表示在t时刻,第k路虚拟信道缓存的动态存取深度;Mk(t)表示Dk(t)在≤t历史中的最大值;Dk为Mk(t)的全局最大值,即第k路虚拟信道数据传输对缓存深度的最小需求值;Tk表示Mk(t)到达Dk的时刻。Dk(t)的更新过程为:如果在t时刻写入1个位宽数据,Dk(t)值就加1;如果在t时刻读出1个位宽数据,Dk(t)就减1。虚拟信道数据是间歇式写入缓存的,且写入的平均速率显著小于突发读出数据率。因此,随着时间的推移,Dk(t)~t关系呈周期性涨落特性。Mk(t)的更新过程为,在每帧的起始时刻t=n·tF(n为正整数,tF表示CADU 传输帧的一帧持续时间)进行判断,如果Dk(t)>Mk(t),则Mk(t)=Dk(t),否则Mk(t)值保持不变。随着时间的推移,Mk(t)~t关系呈阶梯递增特性。如果数传码速率设计值R保证了一定的设计余量,则必定存在一个时刻Tk,使得在该时刻之后缓存的读/写操作过程进入动态平衡状态,即当t=Tk时,Mk(t)进行了最后一次更新,更新后的值为Dk,而当t>Tk时Mk(t)保持Dk值不变。
在每帧的起始时刻,检测虚拟信道缓存的动态存取深度Dk(t)值,选择存取深度取最大值的缓存判断是否还满足Dk(t)≥2·z2(数传合路方案1)或者Dk(t)≥z2(数传合路方案2)的条件,如果满足,则当前帧就传输该虚拟信道数据,否则就插入填充帧虚拟信道(在接收端剔除),以确保数据传输的连续性。采用数传合路方案1时,在每帧的起始时刻,需要检测8个虚拟信道,虽然访问特定的虚拟信道缓存一次可能就会读出2·z2数据量,但平均来讲,对该虚拟信道缓存的重访周期需要8帧时间,在此过程中,数据写入过程不会停止,因此,在较长的重访周期内缓存中的数据会积压较多,对缓存容量的需求也就较高。而采用数传合路方案2时,在每帧的起始时刻只需要检测4个虚拟信道,虽然访问特定的虚拟信道缓存一次只可能读出z2数据量,但平均来讲,对该虚拟信道缓存的重访周期缩短到4帧时间,因此,在较短的重访周期内缓存中的数据积压会较少,对缓存容量的需求也就较低,定量的结果需要对数传合路方案进行动态仿真分析才能获得。
3 数传合路处理的动态仿真分析
3.1 仿真分析流程
本文采用动态仿真分析方法对数传合路方案的缓存需求进行快速、定量的评估。仿真分析流程如图5所示。在仿真分析的过程中,使用写时隙表示写时钟,使用读时隙表示读时钟。各路缓存的写时隙相互独立,每路平均写入速率为21.67 Mbit/s。读时隙对同一组缓存共用。采用数传合路方案1时,虚拟信道VC1~VC8使用同一读时隙,突发读出速率为190Mbit/s;采用数传合路方案2时,虚拟信道VC1~VC4使用同一读时隙,虚拟信道VC5~VC8使用同一读时隙,突发读出速率均为95 Mbit/s。对于写操作过程,在写时隙如果有输入数据,就写入缓存,并对Dk(t)值进行相应的增量更新。对于读操作过程,在每帧的起始时刻,检测各路缓存的Dk(t)值并进行判断,只有当满足判决条件时,才会启动对缓存的突发读操作过程,同时对Dk(t)值进行相应的减量更新。在程序运行过程中,实时监测Mk(t)变量的数值变化情况,当Mk(t)数值递增到一个稳定状态(即数值不再变化)时,表示处理过程已达到平衡状态,此时可以停止程序运行,获取仿真结果并进行分析。

图5 数传合路处理的仿真分析流程Fig.5 Flow chart of multiplexing simulation
3.2 仿真结果及分析
3.2.1 虚拟信道分布仿真结果
在I、Q 路组帧数据流中,虚拟信道随时间分布的仿真结果如图6所示。采用数传合路方案1时,纵轴表示的是虚拟信道VC1~VC8的序号。采用数传合路方案2时,只给出了I帧的虚拟信道分布结果(Q 帧的虚拟信道分布结果同I帧类似),纵轴表示的是虚拟信道VC1~VC4的序号。填充帧的虚拟信道序号为0。从仿真结果数据分析,采用数传合路方案1时的虚拟信道重访周期平均为0.718 1ms,等于8帧时间(每帧时长约为89.77μs);采用数传合路方案2时的虚拟信道重访周期平均为0.359 1ms,等于4帧时间。较小的重访周期有利于缓解缓存中数据的积压程度,从这层意义上讲,数传合路方案2对缓存容量的需求会较低一些。
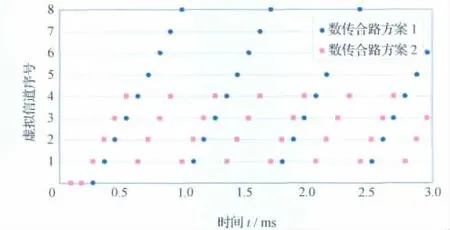
图6 虚拟信道在组帧数据流中的分布Fig.6 Virtual channel distribution in frame streams
3.2.2 填充帧比率仿真结果
在I、Q 路组帧数据流中,填充帧比率的仿真结果如图7、图8所示(分别表示了0~100ms、100~400ms时间段中的填充帧比率变化情况)。从仿真结果可以看出,随着时间的推移,两种数传合路方案的填充帧比率均逐渐收敛于一个统计平均值5%。该值同数传码速率设计裕度计算值4.65%比较吻合,较小的误差是因为计算值附加了一定的余量。

图7 填充帧比率随时间的变化情况(0~100ms)Fig.7 Filled frame ratio variation with time(0~100ms)
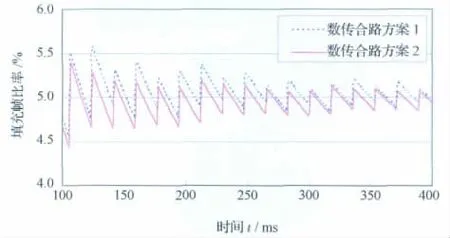
图8 填充帧比率随时间的变化情况(100~400ms)Fig.8 Filled frame ratio variation with time(100~400ms)
从仿真结果还可以看出,在同一时刻,数传合路方案1的填充帧比率明显更大一些。这是因为,采用该方案时,虚拟信道重访周期更长,且在启动突发读操作前对虚拟信道缓存存取深度的判决指标更高,造成缓存的数据存取深度不能及时满足预定的判决条件,也就未能及时触发突发读操作过程,因此,只能插入更多的填充帧以保持数传帧的连续性。填充帧比率较大,则信道利用率较低,虚拟信道缓存中累积的数据量也会更多,对缓存存取深度的需求就相应较高。因此,从信道利用率以及对缓存存取深度的需求角度看,采用数传合路方案2更合理一些。再从统计特性上看,数传合路方案1填充帧比率波动较大,收敛较慢,均方差为0.022;而数传合路方案2填充帧比率波动就较小,收敛较快,均方差为0.018,说明其处理过程能更快地进入到平稳状态。
3.2.3 缓存存取深度仿真结果
通过对缓存存取深度的动态仿真分析,发现采用两种数传合路方案时,均是虚拟信道VC8的缓存深度需求值最大,其它虚拟信道的缓存深度需求值略低一点。在0~50ms时间段中,虚拟信道VC8缓存的动态存取深度D8(t)及其历史最大值M8(t)随时间的变化情况如图9所示;在0~1500ms时间段中,虚拟信道VC8缓存的动态存取深度历史最大值M8(t)随时间的变化情况如图10所示。
从图9所示的仿真结果可知,随着时间的推移,D8(t)呈现出一定周期性的涨落特性,这是缓存数据读/写动态过程表现出的现象,而缓存数据读/写具有间歇性慢写和突发性快读的特点;随着时间的推移,M8(t)呈现出一种阶跃式递增特性,在0~15ms的早期时间段内增长速度较快,在15ms以后增长速度逐渐放缓。
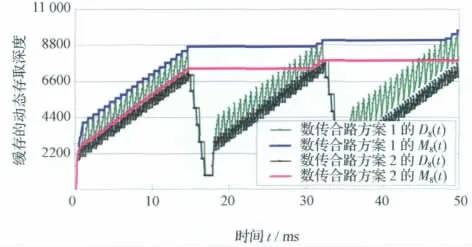
图9 缓存存取深度随时间的变化Fig.9 Stored data amount variation with time in the buffer
从图10所示的仿真结果可知,随着时间的推移,M8(t)的增长速度逐渐放缓,直到达到一个顶峰值后就不再增长,此时数据处理过程达到了动态平衡。采用数传合路方案1,M8(t)在T8=1 430.459 ms 时,达到其顶峰值D8=10 064(≈9.83K>8K);而采用数传合路方案2,M8(t)在T8=722.456 ms时,达到其顶峰值D8=8020(≈7.83K<8K)。可见,数传合路方案2对缓存深度需求值更低(降低了9.83-7.83=2K),采用地址空间深度配置为8K 的缓存,就可以满足其处理需求。相比之下,至少需要地址空间深度配置为16K的缓存,才能满足数传合路方案1的处理需求。
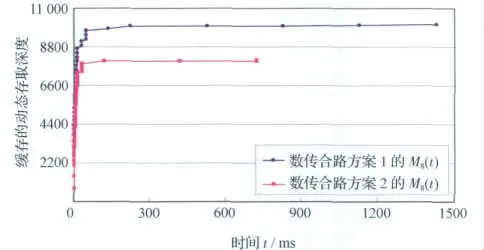
图10 缓存存取深度历史最大值的变化情况Fig.10 Maximum-value evolution of stored data amount in the buffer
4 结束语
针对缓存容量受限条件下多路载荷数据合路传输的问题,基于CCSDS AOS标准的虚拟信道复用机制,提出了两种数传合路方案。利用计算机仿真技术,对两种方案的性能进行了动态分析,择优选择了数传合路方案2,只须采用地址空间深度配置为8K的缓存,即可满足数传合路处理的需求。该方案已应用到某卫星工程项目的数传系统产品中,通过了地面测试、试验以及在轨飞行验证。本文以8路高分辨率图像传输为实例进行了数传合路研究,其设计思想和动态分析方法,可为后续航天器更多种类遥感数据的数传合路设计提供参考。
(References)
[1]Consultative Committee for Space Data System.Advanced orbiting system,network and data links:architectural specifications,CCSDS 701.0-B-3.Blue Book,Issue 3[S].Washington D.C.:CCSDS,2001
[2]Consultative Committee for Space Data System.Ad-vanced orbiting system,network and data links:summery of concept,rational and performance,CCSDS 700.0-G-3.Green Book,Issue 3[S].Annapolis,Maryland:CCSDS,1992
[3]Consultative Committee for Space Data System.AOS space data link protocol,CCSDS 732.0-B-2.Recommended Standard,Issue 2[S].Washington D.C.:CCSDS,2006
[4]谭维炽,顾莹琦.空间数据系统[M].北京:中国科学技术出版社,2004:128-136
Tan Weichi,Gu Yingqi.Space data system[M].Beijing:China Science and Technology Press,2004:128-136(in Chinese)
[5]巴勇.CCSDS协议及空间数据系统分析[D].哈尔滨:哈尔滨工业大学,2000
Ba Yong.CCSDS protocol and analysis of space data system[D].Harbin:Harbin Institute of Technology,2000(in Chinese)
[6]田庄,张庆君.载人航天器AOS虚拟信道调度策略研究[J].航天器工程,2006,15(2):20-22
Tian Zhuang,Zhang Qingjun.Research on advanced orbiting system virtual channel scheduling strategy of manned spacecraft[J].Spacecraft Engineering,2006,15(2):20-22(in Chinese)
[7]公绪晓.高速同步/异步混合复接器的设计与实现[D].北京:中国科学院研究生院,2006
Gong Xuxiao.Design and implementation of synchronous and asynchronous high rate multiplexer[D].Beijing:Graduate University of Chinese Academy of science,2006(in Chinese)
[8]别玉霞,潘成胜,蔡睿妍.AOS虚拟信道复用技术研究与仿真[J].宇航学报,2011,32(1):193-198
Bie Yuxia,Pan Chengsheng,Cai Ruiyan.Research and simulation on AOS virtual channel multiplexing technique[J].Journal of Astronautics,2011,32(1):193-198(in Chinese)
[9]周渊,吴增印.基于一种专用星载高速总线结构的FIFO容量计算[J].宇航学报,2009,30(5):1998-2002
Zhou Yuan,Wu Zengyin.The calculation of FIFO buffer size in a nonstandard spaceborne high speed data bus structure[J].Journal of Astronautics,2009,30(5):1998-2002(in Chinese)
[10]Said A,Pearlman W A.A new,fast and efficient image codec based on set partitioning in hierarchical trees[J].IEEE Transactions on Circuits and Systems for Video Technology,1996,6(3):243-250
猜你喜欢
电视技术(2021年8期)2021-10-21 08:19:48
计算机测量与控制(2021年8期)2021-08-23 09:02:16
视听(2021年8期)2021-08-12 10:53:42
载人航天(2019年1期)2019-03-07 01:41:02
移动通信(2017年9期)2017-05-31 02:20:18
无线互联科技(2015年11期)2016-03-04 20:46:07
电子器件(2015年5期)2015-12-29 08:43:30
移动通信(2015年17期)2015-08-24 08:13:42
移动通信(2015年17期)2015-08-24 08:13:14
电子技术与软件工程(2014年20期)2014-11-19 09:55:45
