
基于Link16的相对定位初值计算
2013-12-17 10:42:30张国安
电子科技 2013年4期
张国安
(中国电子科技集团第20研究所通信事业部,陕西西安 710068)
Link16是美军用于三军联合作战的通用数据链,具有大容量、保密、部署灵活、抗干扰和抗摧毁的特点。系统采用时分多址通信体制,同时具备通信、导航和识别3大功能。其相对导航功能可独立为其所覆盖的战区提供高精度导航服务。在卫星导航易受干扰、惯性导航存在漂移误差的情况下,Link16相对导航所具有的极强抗干扰和生存能力是其他导航手段的有力补充[1]。
1 原理和相对定位初值计算出错问题
Link16在完成坐标原点捕获后,最少需要3个位置基准成员建立相对坐标系、并担当相对导航责任,才能实现相对导航功能。Link16实现相对导航功能前,先通过RTT(Round-Trip Time)实现定位成员和位置基准与LINK16时间基准的高精度同步,同步过程实现后,位置基准向Link16成员广播PPLI(Packet of Precise Location and Identification)消息,定位成员收到位置基准发送的PPLI消息后,利用测出的PPLI消息到达时间TOA(Time of Arrival),可获得位置基准与定位成员之间精确距离,再利用PPLI消息中位置基准的位置信息、位置质量、时间质量、消息发送时间等信息,通过相对定位递推滤波器,即可计算出定位成员的相对位置[2]。
Link16的相对定位递推滤波器为适应Link16的时分多址通信体制,采用序贯递推工作方式,以适应对分时到达的PPLI消息的实时处理,由于分时到达的单一PPLI消息不能独立完成相对定位计算,所以,这种相对定位递推滤波器需要相对定位初值的引导才能正常启动。如果相对定位初值计算错误,就会把相对定位递推滤波器引导到错误位置,导致滤波器发散或者定位出错,所以正确计算相对定位初值是Link16相对导航正常工作的前提。然而,Link16成员分布,尤其是担负相对导航责任的位置基准的分布,由于受作战区域的限制,经常无法满足相对导航对几何因子的要求,导致相对定位初值计算错误。
2 Link16相对定位初值计算错误分析
要正确计算定位初值,至少需要3个Link16位置基准的同时参与,位置基准的位置质量、同步质量以及定位成员接收位置基准PPLI消息分散度都会对定位初值正确计算产生影响,但这些影响可通过改进Link16设备的软硬件性能得到克服。导致定位初值计算错误是由于Link16位置基准的不适当分布引起的。初始定位时,由于没有定位成员初始位置,无法计算定位成员与位置基准之间形成的几何因子,所以当几何因子严重变坏时,定位成员会计算出错误的定位初值。
2.1 基准共线引起的定位初值错误
当位置基准共线时,会引起定位初值计算错误,如图1所示。

图1 3个位置基准共线与定位初值计算错误
在3个位置基准P1、P2、P3近似排列在一条直线时,当用它们进行定位初值计算时,可能把真实位置点UT的镜像点UF作为定位初值,因为UF和UT都能满足对3个位置基准的测距,图1中对每个位置基准对应的测距近似相等的边用相同标记作出了标识。
2.2 基准2点共点的定位初值错误
如图2所示,当3个位置基准中P2、P3相距很近时,这两个位置基准就认为近似共点,这时在定位初值计算时,也可能出现镜像点错误问题,即把真实位置点UT的镜像点UF作为定位初值,图2中,对每个位置基准对应的测距近似相等的边用相同标记作出了标识。

图2 3个位置基准2点共点与定位初值计算错误
2.3 基准3点共点的定位初值错误
位置基准3点共点是指3个位置基准在一个位置或相互相距很近。当3个位置基准共点时,会使定位初值计算错误,如图3所示。
图3中,UT是定位成员的真实位置,则错误计算的定位初值UF可以出现在UT和3个位置基准中心点连线为半径的圆周上的任何位置。图3中,对每个位置基准对应的测距近似相等的边用相同线型作出了标识。

图3 3个位置基准3点共点与定位初值计算错误
3 提高Link16相对定位初值正确性
针对第2节中分析的定位初值计算错误的情形,设计了位置基准共线和共点时的识别方法。
3.1 3个位置基准共线识别方法
当3个位置基准接近共线时,会造成3个位置基准围成的3角形夹角接近0°或接近180°,如图4所示。这时,α接近180°,β角接近0°。

图4 3个位置基准近似共线时的3角形夹角
设3个位置基准的3维坐标分别是 P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3),则

其中,P12是从 P1到 P2的向量;(x12,y12,z12)是 P12向量坐标;P13是从 P1到 P3的向量;(x13,y13,z13)是 P13向量坐标;P23是从 P2到 P3的向量;(x23,y23,z23)是P23向量坐标。

当β角接近0°时,cosβ接近1,所以,可根据系统特性确定一个经验值δ,当>1-δ时,认为β角接近 0°。
类似地

其中,P21是从P2~P1的向量;P21=-P12。当α角接近180°时,cosα接近-1,所以可以同样利用上述δ进行判断,当时,认为 α 角接近180°。在实际共线识别中,只要判断1-δ同时成立,就可以认为3个位置基准共线。
3.2 3个位置基准2点共点的识别方法
位置基准2点共点是指2个位置基准在同一位置或相距很近,并且和第3个位置基准相距较远,如图5所示。

图5 3个位置基准中的2个近似共点时的3角图形
按照3个位置基准的3维坐标设置,P1与P2之间的距离

P1P3之间的距离

P2P3之间的距离

3.3 3个位置基准3点共点的识别方法
当3个位置基准的3个点在同一位置或相互相距很近时,认为3个位置基准3点共点,如图6所示。

图6 3个位置基准近似共点
当Link16定位成员NU到3个位置基准距离最小值DNPmin>3个位置基准之间距离的最大值DPPmax的5倍时,即:DNPmin>5DPPmax,通过仿真表明,定位成员NU的几何因子会>5.0,这时可能引起定位初值计算错误,即认为3个位置基准近似共点。
3.4 定位初值计算过程
Link16位置基准分布出现上述任一情形,都能导致定位初值计算的错误,但有时上述3种情形甚至会同时出现,从3种情形识别方法的算法复杂度可以看出,3个位置基准2点共点的识别算法是最简便的,其次是3个位置基准3点共点的识别算法,考虑到这些因素,采用位置基准共线、共点识别的定位初值计算过程是:首先,对收到的位置基准进行选择,从多个位置基准中选出3个时间质量,位置质量符合要求的位置基准,然后对3个位置基准先进行2点共点的识别,再进行3点共点的识别,最后进行3点共线的识别,如果位置基准处于上述的3种共线、共点情形的任一种情形,则从多个位置基准中重新配对选择3个位置基准进行共线、共点识别,直到选出不存在共线、共点的位置基准或由于条件不满足,放弃定位初值的计算。
4 Link16相对定位初值计算仿真
Link16相对定位初值计算仿真通过设计多种共线和共点位置基准分布工作环境和2种定位成员航路,仿真验证计算定位初值算法的效能。定位初值计算仿真采用2种算法,一种是在位置基准选择时,不考虑共线、共点情况(算法1);另一种采用考虑共线、共点情况(算法2),两种算法中的定位初值解算均采用最小二乘定位实现,最小二乘定位通过积累输入的3个位置基准的PPLI消息实现定位。仿真设置了3个位置基准3点共线、2点共点和3点共点的分布[3]。
4.1 基准3点共线时定位初值仿真
3个位置基准共线时定位初值计算仿真布局,如图7所示。
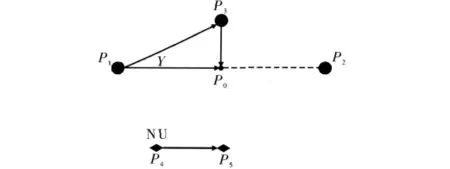
图7 3个位置基准共线时定位初值计算仿真布局
位置基准P2向另外2个位置基准P1、P2连线的中点P0点靠近,让γ角从5°向0°变化,P1P0=P0P2=100 km,假设位置基准的位置误差可以忽略,仿真设置了位置基准多级时间质量,并量化为同步噪声,假设每个位置基准每帧(1帧等于12 s)发送4个PPLI消息,采用算法1和算法2分别计算定位成员NU在P5点不动时和以200 m/s巡航速度从P4向P5运动时的定位初值。仿真结果图8和图9所示。

图8 NU静态时,3个位置基准3点共线定位初值计算仿真结果

图9 NU动态时,3个位置基准3点共线定位初值计算仿真结果
从图8,图9可比对两种定位初值计算方法在同样条件下的出错概率,从图8和图9的算法1曲线可以看到共线程度、定位成员高动态和同步噪声对算法1影响明显,对算法2却没有影响,说明以上共线判别准则是有效的。从图9还可看出,定位成员的高动态对定位初值的正确计算有较大影响,这是由于对时分通信系统,3个位置基准的PPLI消息是分时送达定位成员的,采用最小二乘原理解算高动态定位成员的定位初值会产生系统误差,增加定位初值计算出错概率[4]。
4.2 基准2点共点时定位初值仿真
3个位置基准2点共点时定位初值计算仿真布局,如图10所示。

图10 3个位置基准2点共点时定位初值计算仿真布局
位置基准P2沿P1P3为半径,P1为圆心的圆上向P3靠近,让 γ 角从5°向0°变化,P1P3=P3P5=100 km,其他仿真条件如不变,用算法1和算法2分别计算定位成员NU在在P5点不动时和以200 m/s巡航速度从P4向P5运动时的定位初值[5],仿真结果如图11和图12所示。

图11 NU静态时,3个位置基准2点共点定位初值计算仿真结果

图12 NU动态时,3个位置基准2点共点定位初值计算仿真结果
从图11和图12可以看出,算法2有效阻止了2点共点时定位初值计算错误的发生。
4.3 基准3点共点时定位初值仿真
3个位置基准共点时定位初值计算仿真布局,如图13所示。

图13 3个位置基准共点时定位初值计算仿真布局
3个位置基准P1、P2和P3呈正三角形分布,相互相距500 m,定位成员NU从P1中垂线延长的P4点开始直线运动到P5点,P1P4=1 km,P4P5=10 km,用算法1和算法2分别计算定位成员NU在各测试点T1~T5静态和动态时的定位初值,在动态仿真时,设置NU以200 m/s巡航速度从P4向P5运动,仿真结果如图14和图15所示。

从图14和图15可以看出,算法2有效阻止了3点共点时定位初值计算错误的发生。
5 结束语
通过Link16相对定位初值计算仿真结果可以看到,在位置基准选择时,由于采用了对位置基准共线、共点情况的识别,有效阻止了定位初值计算错误的发生。
[1]梅文华,蔡善法.JTIDS/Link16数据链[M].北京:北京工业出版社,2007.
[2]刘徐德.战术通信、导航定位和识别综合系统文集:第1集[M].北京:电子工业出版社,1991.
[3]武楠,王华,匡镜明.JTIDS相对导航性能分析和仿真[J].系统工程与电子技术,2005,27(3):464 -468.
[4]胡景疆,冯永浩.最小二乘算法在JTIDS相对导航中的应用[J].通信技术,2009(4):212 -214,217.
[5]KALMAN R E.A new approach to linear filtering and prediction problems[J].Trans.ASME.J.BasicEng,1960,82(3):95-107.
猜你喜欢
科学导报(2023年74期)2023-10-28 08:54:39
中学生数理化·高一版(2023年2期)2023-03-23 02:17:06
新高考·高一数学(2022年3期)2022-04-28 07:02:46
数学物理学报(2022年1期)2022-03-16 06:15:04
中等数学(2021年4期)2021-08-14 02:34:40
空间科学学报(2020年1期)2021-01-14 00:53:28
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:46
小学教学参考(数学)(2017年1期)2017-03-01 20:51:02
高中生·天天向上(2016年4期)2016-05-04 08:59:10
中学化学(2015年5期)2015-07-13 07:34:35
