
基于Proteus单片机仿真的舵机控制设计
2013-12-14 07:40:00王自珍殳国华
电气自动化 2013年4期
王自珍,殳国华
(上海交通大学 电气工程系,上海 200240)
0 引言
舵机也称伺服电机,其特点是结构紧凑、易安装调试、控制简单、大扭力、成本较低等,是一种位置伺服的驱动器,适用于那些需要角度不断变化并能够保持的控制系统,广泛应用于电气自动化工业控制系统特别是机器人机电控制系统中,作为微机电系统和航模基本的输出执行机构。舵机的主要性能取决于最大力矩和工作速度(一般是以秒/60度为单位),而且简单的控制和输出使得单片机系统很容易与之接口。运用Proteus软件结合Keil开发工具对设计进行联合实时仿真调试,不但可以减少实验过程损耗,并能尽快排查系统的软硬件错误提高设计效率[1-3]。
1 系统设计
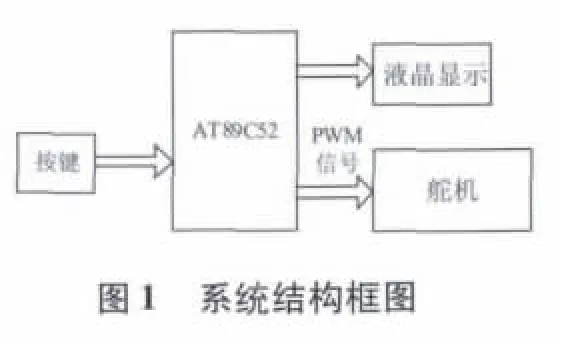
系统以AT89C52单片机为主控制芯片实现对舵机输出转角的控制,产生周期为20 ms的PWM控制信号,设置两个按键进行角度从0°到180°步进为45°的可增可减的角度调节,并且通过LM032L液晶显示模块进行舵机角度显示。
单片机作为舵机的控制部分,能使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件技术,所以受外界干扰小,整个系统工作可靠。系统运用Proteus软件进行仿真调试。系统结构框图如图1。
2 系统硬件电路设计
2.1 舵机
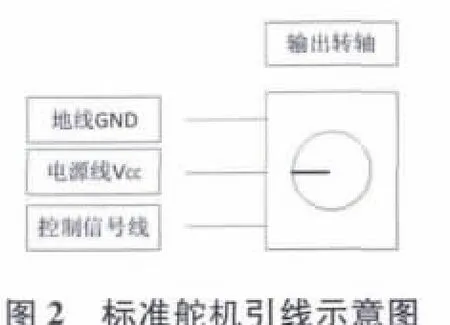
标准的舵机有三条引线,分别为电源线VCC、地线GND和控制信号线,如图2所示。
舵机的内部有一个基准电路,产生周期为20 ms、宽度为1.5 ms的基准信号,并将获得的直流偏置电压和电位器的电压比较,获得电压输出。最后,将电压差的正、负输出到电机芯片决定电机的正、反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使电压差为0,电机停止转动。舵机的控制信号也是PWM信号,利用占空比的变化改变舵机的位置[4-7]。
2.2 主控电路
系统选用 AT89C52单片机作为主控芯片,AT89C52是一种低功耗、高性能CMOS8位微控制器,具有8 K在系统可编程Flash存储器。使用Atmel公司高密度非易失性存储技术制造,与工艺80C51产品指令和引脚完全兼容。片上Flash允许程序存储器在系统可编程,亦适于常规编程器。在单芯片上,拥有灵巧的8位 CPU和在系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提高灵活、超有效的解决方案。
2.3 角度设定和液晶显示
本实验利用AT89S52控制单个舵机,开始时舵机角度自转为0°,通过实现两个独立按键实现对舵机角度在 0°、45°、90°、135°、180°五种角度上的加减,并在20×2的LM032L液晶显示模块上显示舵机转角角度。
LM032L液晶显示模块集成LCD显示屏、背景光源、线路板和驱动集成电路等部件,引脚可与单片机通用I/O口,使用十分方便。
2.4 Proteus软件仿真电路
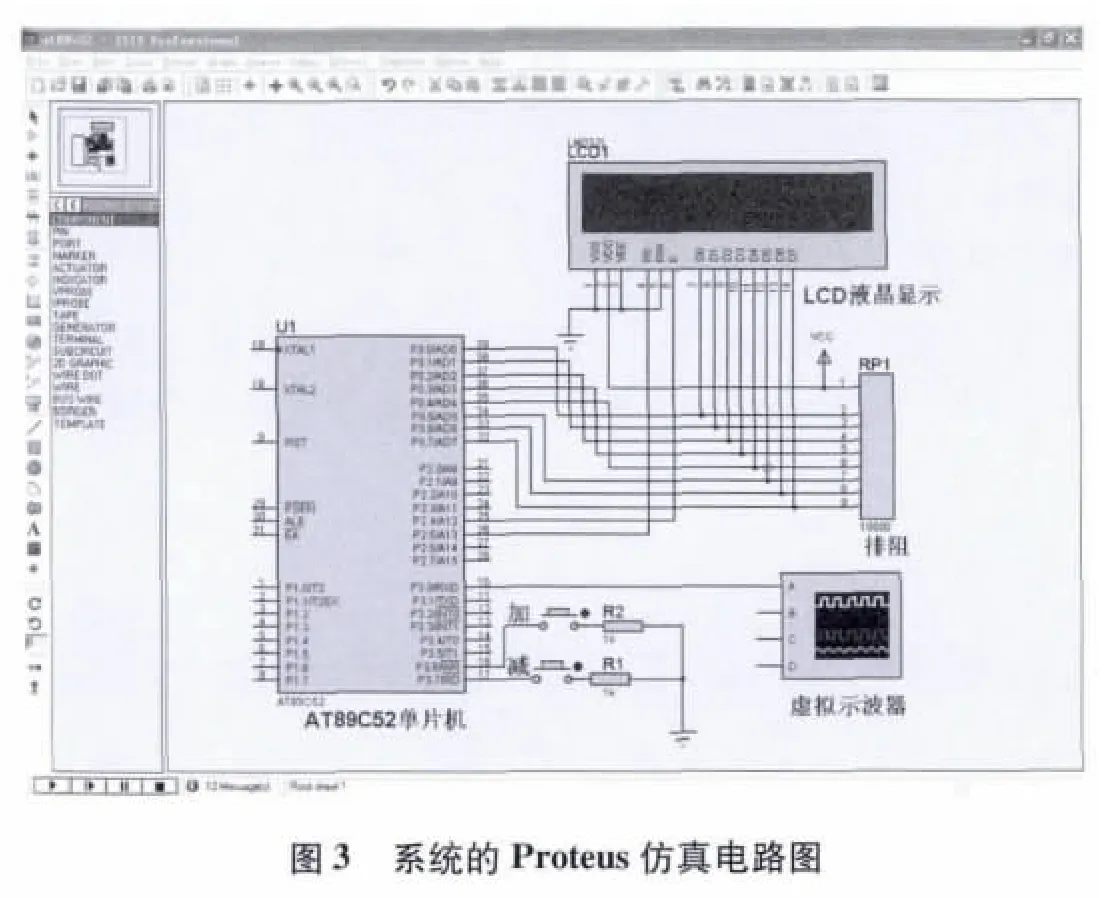


Proteus ISIS是目前最好的模拟单片机外围器件的工具可以仿真51系列、AVR,PIC等常用的MCU及其外围电路。将系统在仿真软件中搭建,如图3所示。单片机P3.0为PWM信号输出端接软件自带的虚拟示波器便于观察 PWM信号,按键分别接P3.6和P3.7,LM032L经上拉电阻接单片机通用I/O口。
3 系统的软件设计
单片机控制单个舵机比较简单,利用一个定时器即可。假设仅控制舵机5个角度转动,其控制思路如下:只利用一个定时器T0,定时时间为0.5 ms;定义一个角度标识,数值可以为 1,2,3,4,5,实 0.5,1,1.5,2,2.5 ms高电平的输出;再定义一个变量,数值最大为40,实现周期为20 ms。每次进入定时中断,判断此时的角度标识,进行相应的操作。比如此时为5,则进入前5次中断期间,信号输出为高电平,即2.5 ms的高电平;剩下的35次中断期间,信号输出为低电平,即17.5 ms的低电平。这样总的时间是20 ms,为一个周期。图4为舵机输出转角与输入信号脉冲宽度的关系,其脉冲宽度在0.5到2.5 ms变化时,舵机输出轴转角在 0°到 180°变化[8-9]。
利用Proteus与Keil软件对系统进行软硬件联合仿真调试。Keil软件是一个支持汇编语言和C语言等高级语言的软件开发平台,本设计的系统程序在此平台上进行开发编译,并与Proteus结合对系统实时仿真。实验程序流程图如图5所示。
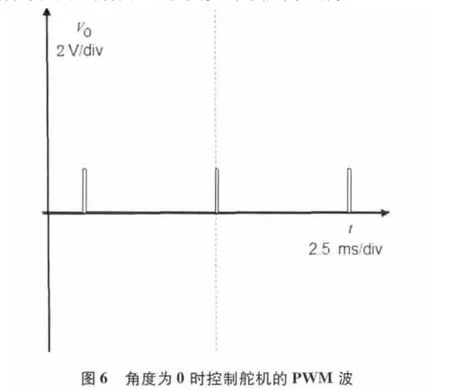

4 系统仿真结果
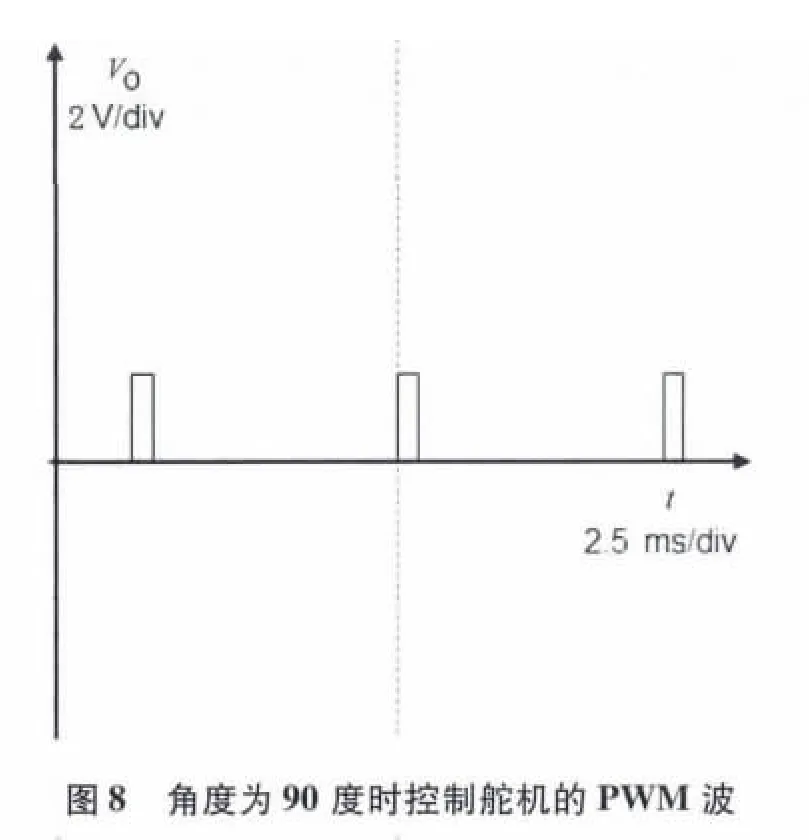
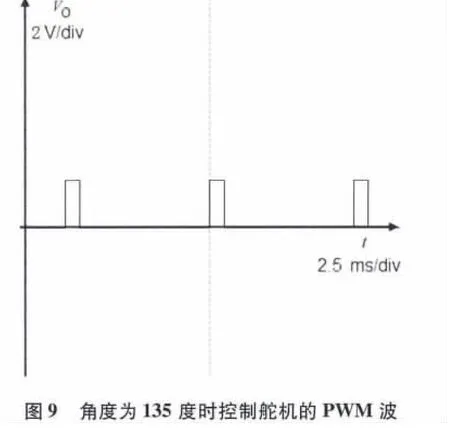
Proteus软件与Keil软件联合对系统进行实时仿真,通过按键增加或减少舵机角度,仿真结果如图6,7,8,9,10。虚拟示波器中显示的是单片机输出驱动舵机的PWM波一个周期内的波形,对应的角度显示在液晶显示模块上。
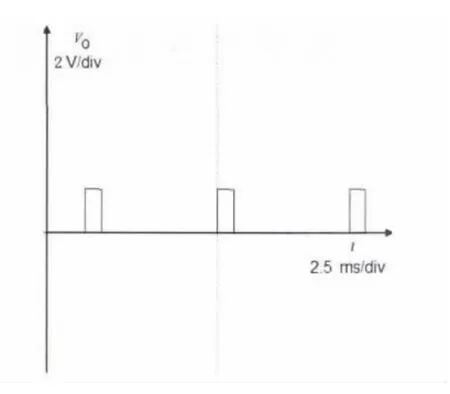
图10 角度为180度时控制舵机的PWM波
5 结束语
本设计采用PWM信号控制舵机,实现了角度可设定,角度可显示,电路简单可靠,控制灵活,成本低,可移植性强。系统经实物硬件搭建进行调试,效果良好。通过Proteus和Keil对系统的联合仿真提高了设计效率和可靠性,降低了设计的硬件损耗,为今后舵机的广泛精确地应用提供了一种良好的设计模式。
[1]王晓明.电动机的单片机控制[M].北京,北京航空航天出版社,2007.
[2]颜嘉男.伺服电机应用技术[M].北京,科学出版社,2010.
[3]余永权.单片机应用系统的功率接口技术[M].北京,北京航空航天出版社,1992.
[4]陈海宴.51单片机原理及应用基于Keil C与 Proteus[M].北京,科学出版社,2004.
[5]孙凌燕,黄允千.Proteus与Keil软件的整合在单片机实验开发中的应用[J].实验室研究与探索,2008,27(4):59 -61.
[6]伍冯洁,谢斌.基于Proteus与Keil的单片机实验教学改革[J].实验室研究与探索,2009,28(7):125 -127.
[7]郭天祥.51单片机C语言教程[M].北京,电子工业出版社,2008.
[8]王幸之,钟爱琴.AT89系列单片机原理及接口技术[M].北京,北京航空航天大学出版社,2004.
[9]康华光.电子技术基础(第五版)[M].北京,高等教育出版社,2005.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
解放军健康(2017年5期)2017-08-01 06:27:42
制造业自动化(2017年2期)2017-03-20 14:26:08
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
通信电源技术(2016年4期)2016-04-04 02:58:00
交通建设与管理(2015年13期)2015-03-20 15:18:48
舰船科学技术(2015年8期)2015-02-27 15:38:46
化学工业与工程(2012年6期)2012-02-10 03:20:59
