
基于SVPWM控制的开关磁阻电机能量回馈系统的仿真研究
2013-12-14 07:39:50杜红宇丁金龙卢秀和薛鹏李宏侠
电气自动化 2013年4期
杜红宇,丁金龙,卢秀和,薛鹏,李宏侠
(1.长春工业大学 电气与电子工程学院,吉林 长春 130012;2.北京中纺锐力机电有限公司,北京 101102)
0 引言
近年来,随着电力电子技术和控制工程领域的发展,促进了调速领域的迅猛发展,一种新型的调速系统——开关磁阻电机也随之发展起来了。由于开关磁阻电机具有结构简单,成本低廉,调速范围宽,能四象限运行等特点,成为了直流电机调速系统、变频调速系统和永磁无刷电机调速系统强有力的竞争者。
开关磁阻电机处在发电状态时,控制器和电动机会将传动系统的机械能转换为电能,经过开关磁阻电机控制器功率电路中的六个功率开关馈送回功率电路的直流母线中。若功率变换器中没有采用内置或外加制动单元来消耗电能,就会导致直流母线电压升高,如果超过功率器件的耐压值,就会导致功率变换器和电解电容的损坏,甚至会影响整个系统的正常工作。为了解决这个问题,通常情况是在直流母线上的电解电容两端并联一个功率开关和功率电阻,这种方法虽然简单,成本低廉,且电网无污染;但是当发电功率比较大的时候,电阻的发热量也会随之增加,这就加重了整个系统的散热负担,同时也造成了巨大的能源浪费[1]。因此,本文结合PWM整流技术,根据开关磁阻电机的调速原理,设计了能量回馈系统,将开关磁阻电机制动状态下产生的电能,通过有源能量回馈的方法及时高效地回馈到电网里,这不仅可以降低开关磁阻电机整体的能耗,还可以解决泵升电压过高的问题。在能源资源紧缺的今天,无疑具有十分重要的现实意义。
1 SRM的制动工作原理
本文以12/8极开关磁阻电机为例,其三相定子绕组分别为Lu、Lv、Lw,如图1虚线框内所示。当电机工作在制动状态时,功率开关管导通,此时三相定子绕组通过支撑电容C1提供的预励磁电流,产生制动转矩来吸收电机产生的全部机械能,再将所吸收的机械能转化为电磁能储存在三相定子绕组中。由于开关磁阻电机的三相定子绕组是交替导通的,所以电机处在发电状态时定子绕组向直流母线发出脉动的电流,支撑电容C1两端的电压也为脉动的电压,且当电机的转速增大时电压脉动的频率也会随之增大,脉动电压的幅值会随着电机回馈功率的增加而增大[2]。
2 三相PWM整流器的拓扑结构
本设计将开关磁阻电机的功率电路及电机机组作为PWM整流器的负载,通过有源逆变的方式将开关磁阻电机制动时发出的电能回馈到电网中去。在设计能量回馈系统时可以将图1虚线框中的部分等效为直流源。其等效模型如图2所示。将电压型PWM整流器,并通过滤波电感与电网相连。当逆变器以单位功率因数进行并网回馈时,能量回馈系统输出的电流就是与三相电网电压同频同相的交流电。
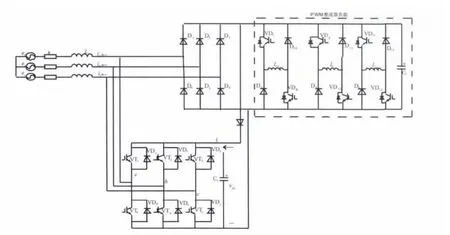
图1 开关磁阻电机能量回馈系统总体结构图

图2 三相电压源型逆变器拓扑
根据基尔霍夫电压、电流定律,可以得到能量回馈系统逆变器主电路在ABC静止坐标系下的数学模型:
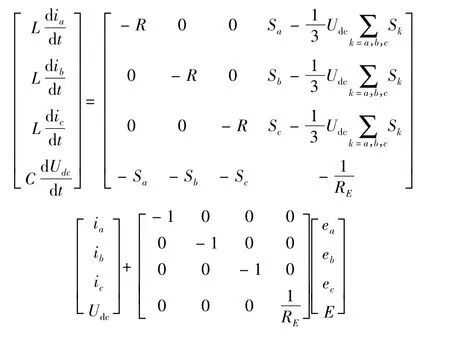
式中:ea,eb,ec为三相电网电压;ia,ib,ic为三相并网电流;L 为三相滤波电感;R为其等效电阻;E为开关磁阻电机制动工作状态下,等效的直流母线两端电压;Udc为直流侧电容两端的电压;Si为开关函数。
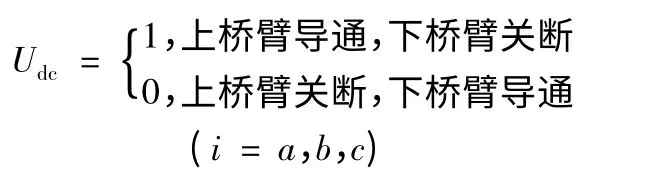
由于三相电压型PWM整流器上下桥臂的开关管的导通信号是互补的,所以可将Udc定义为:
通过数学模型可知,系统需要控制的流过滤波电感上的三相电流均为时变的交流量,因而不方便控制。为了解决这一问题,不妨采用矢量解耦的方法,通过坐标变换的方式将三相静止的ABC坐标系下的数学模型转换为在同步旋转的dq坐标系下的数学模型(旋转角速度 ω =2πf,其中 f=50 Hz),如式 1 所示[3]。

3 能量回馈系统的SVPWM控制
3.1 SVPWM基本原理及合成矢量所在扇区的判断
根据第3部分所定义的开关函数,将功率开关管IGBT视为理想元件,如图 2所示,其中 VT1与VT2、VT3和 VT4、VT5与VT6之间是互锁的,可分为000、001、010、011、100、101、110、111,共8个状态,其中矢量和为零矢量,其余的 6 个矢量~为工作矢量。如图3所示,这6个工作矢量间的夹角互为60°。根据矢量合成原理可知,在两相静止的αβ坐标系下,任意一个矢量均能由以上8个基本矢量中与其相邻的两个基本矢量合成。
假设Vref1,Vref2,Vref3为 Vs在三相坐标系上的投影,则有:

图3 空间电压矢量的分区与合成
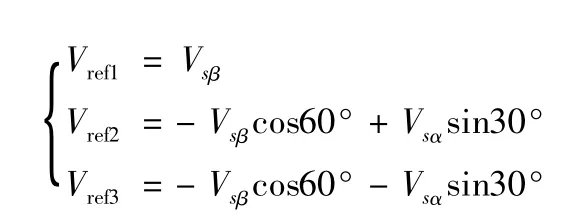
设二值函数A,B,C,可由公式N=A+2B+4C,判断空间电压矢量所在的扇区。
当 Vref1>0时,A=1,否则 A=0;
当 Vref2>0时,B=1,否则 B=0;
当 Vref3>0时,C=1,否则 C=0;
这样就得到了N与扇区所在位置的对应关系,如表1所示。

表1 N与扇区所在位置的对应关系
3.2 各扇区矢量的作用时间
每个扇区均由一个零矢量和两个相邻的非零矢量作用,其作用时间可定为X,Y,Z。只要判断出任意一个合成矢量所在的扇区,就能求出电压空间矢量的作用时间。如果让Vs在复平面内匀速旋转,就可以得到三相对称的正弦量,由于受到功率开关管开关频率和矢量组合情况的限制,使得Vs只能以一个速度旋转。不难看出PWM的开关频率越高,Vs的旋转轨迹就越接近于圆。设PWM的开关周期为Ts,那么各扇区矢量的作用时间的计算方法如下所示:
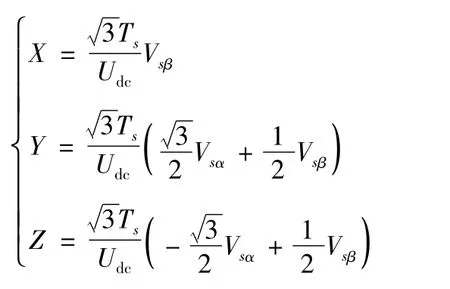
那么,Vs所处的扇区与其相邻的两个非零空间电压矢量作用时间 Tx、Ty的对应关系如下表2所示[4]。

表2 扇区与Tx、Ty的对应关系
综上是对任意的空间电压合成矢量Vs所处扇区的判断和其所在扇区的各个电压矢量作用时间的计算。这两个问题的解决,也就基本实现了SVPWM的算法控制,这为后文的MATLAB/Simulink仿真打下了坚实的基础。
4 能量回馈系统的MATLAB仿真及结果分析
4.1 能量回馈系统仿真模型的建立
在MATLAB/Simulink动态仿真环境下,采用ode45s算法,对该能量回馈系统进行建模和仿真[5]。该能量回馈系统控制核心主要包括:由六只IGBT组成的三相桥式逆变主电路、坐标变换模块、SVPWM调制波生成模块、PLL锁相环模块、LCL滤波模块以及PI调节等。同时,本系统在Simulink仿真阶段将开关磁阻电机的直流母线电压用650 V直流电源模块代替。主要参数为电网频率50 Hz,电网线电压有效值380 V,直流母线电压690 V,滤波器电抗值为8.4 mH,开关频率3.3 k,那么系统的仿真模型如图4所示。
4.2 能量回馈系统仿真结果分析
从图5可以看出,当A相电网电压在一个周期内变化时,对应锁相角θ在[-π,π]闭区间变化。同时从扇区波形也可以看出此时扇区sector对应的切换方向。
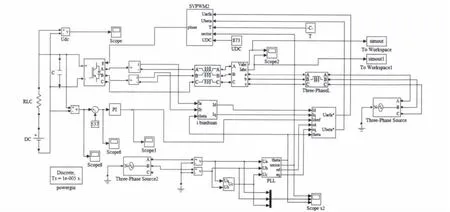
图4 能量回馈系统仿真模型
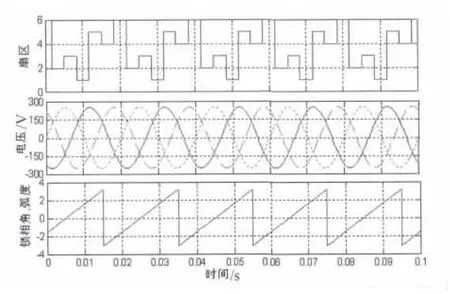
图5 扇区、三相电网电压、锁相角的仿真波形
当系统稳态运行时,通过仿真可以得到三相电网相电压和三相回馈电流波形如图6所示,回馈电流峰值为5.3 A。三相回馈电流波形与三相电网电压波形基本上是严格的同频同相,因此能够实现单位功率因数的并网回馈。同时还可以看出,在回馈的过程中该系统的响应速度非常快,能够迅速的进入稳定状态,达到平稳回馈。

图6 回馈电流和三相电网电压仿真波形
根据国家标准GB/T19939—2005的要求将能量回馈系统输出的电流波形用MATLAB做傅里叶分析,就能得到各次谐波电流的占有率HRik和电流总谐波畸变率THDi,如图7所示,已达到并网回馈的标准。

图7 能量回馈系统输出电流波形的FFT分析
5 结束语
本文根据三相电压型PWM整流器的数学模型,结合SVPWM算法的特点,在MATLAB/Simulink下构建仿真模型,通过仿真结果验证了控制策略的正确性。同时也证明了:本文应用的SVPWM控制算法,将PWM整流器技术应用于开关磁阻电机,在不改变原有功率电路的基础上将开关磁阻电机制动工作状态下发出的电能回馈到电网,达到取消制动电阻和节能减耗的目的。
[1]胡崇岳.现代交流调速技术[M].北京:机械工业出版社,2004,9.
[2]刘闯.开关磁阻电机起动/发电系统理论研究与工程实践[D].南京:南京航空航天大学,2000.
[3]赵为.太阳能光伏并网发电系统的研究[硕士论文][D].合肥:合肥工业大学,2003.
[4]H.W.Van Der Broeck,et al.Ana1ysis and Realization of a Pu1se width Modulator Based on Voltage Space Veetors[J].IEEE Trans on IA,2008,24(l):142-150.
[5]洪乃刚.电力电子,电机控制系统的建模和仿真[M].北京:机械工业出版社,2010.2.
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
防爆电机(2021年4期)2021-07-28 07:42:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
电子设计工程(2017年20期)2017-02-10 03:40:05
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年1期)2015-03-01 03:49:08
