利用Pictometry倾斜摄影技术进行全自动快速三维实景城市生产
——以常州市三维实景城市生产为例
2013-12-11 07:27田野,向宇,高峰,高亮
测绘通报 2013年2期
田 野,向 宇,高 峰,高 亮
(北京天下图数据技术有限公司,北京100083)
一、引 言
倾斜摄影技术是国际测绘领域近些年发展起来的一项新的对地观测技术。该技术目前已在欧美等发达国家广泛应用于应急指挥、国土安全、城市管理、房产税收等行业。北京天下图数据技术有限公司则在2010年4月首次将世界领先的倾斜摄影技术引入中国,开启了中国航空倾斜摄影时代。
目前,我国已经启动数字城市建设,然而传统的手工三维模型生产技术需要耗费大量的人力和时间,同时基于影像的立体像对建设工艺和基于矢量楼块的快速建模工艺比较简单,不能生成较好的精细模型[1]。此外,由于人工纹理采集的局限性,三维模型呈现的真实性较差,且纹理采集依然需要耗费大量人力和时间。因此,传统三维建模技术已不能够满足我国数字化城市建设的需求,而快速自动真实三维场景生产便显得尤为迫切。倾斜影像能够提供丰富的纹理信息,结合三维模型制作,能够得到更真实的三维场景。本文以江苏省常州市为例,介绍如何采用倾斜摄影技术进行全自动快速三维实景城市生产。
二、倾斜摄影技术介绍
1.国内外倾斜摄影技术简介
倾斜摄影技术颠覆了以往正摄影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从多个不同的角度采集影像。由此获得的倾斜影像不仅能够真实地反映地物情况,而且还能利用先进的定位技术,嵌入精确的地理信息[2]。
国外倾斜摄影系统主要分3种类型:扇形布局、块状布局和马耳他十字形布局。扇形布局主要用于勘察;块状布局主要用于测图和监察;马耳他十字形布局的系统是Pictometry公司的5镜头系统,用于可视化、测图和解译。这些类型的倾斜摄影系统镜头数有2~6个[3]。目前,Trimble公司推出了一款由3个相机组成(一个垂直和两个倾斜相机)的航空倾斜摄影系统,设备由相机、IMU、POS、机箱等组成。其拍摄原理是要保证能够获取地物的4个侧面信息,每次拍照结束后,连成一体的3个相机都会旋转90°,待下次拍照后再次旋转回来。
国内方面,刘先林院士研制的SWDC-5倾斜摄影系统成功地完成了平顶山试验,是国内的倾斜相机的一大突破。SWDC-5通过同一飞行平台分别用5个视角对地进行拍摄,并集成POS系统,以获取每张影像的位置及姿态信息。
2.Pictometry倾斜摄影系统
(1)Pictometry倾斜摄影系统组成
Pictometry倾斜摄影系统包括硬件设备和软件系统[4]。硬件设备包括飞行平台、倾斜相机、POS AV;软件系统包括航线设计软件CountyPlanner、数据预处理软件 Developer、POS解算软件 POSPac 5.3。
(2)硬件设备简介
1)飞行平台。飞机巡航速度要求不超过222 km/h,目前国内仅有运五飞机满足要求。
2)倾斜相机。倾斜摄影相机由5个相机组成。其中,camera 0镜头垂直向下(正摄镜头),其他4个倾斜相机镜头如图1所示分别固定在camera 0的前后左右,分别用于获取地物东南西北四个侧面的影像,倾斜角均为40°[3]。相机固定位置及技术参数见表1。
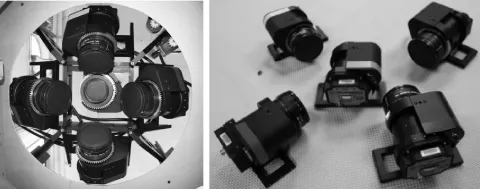
图1 倾斜相机示意图
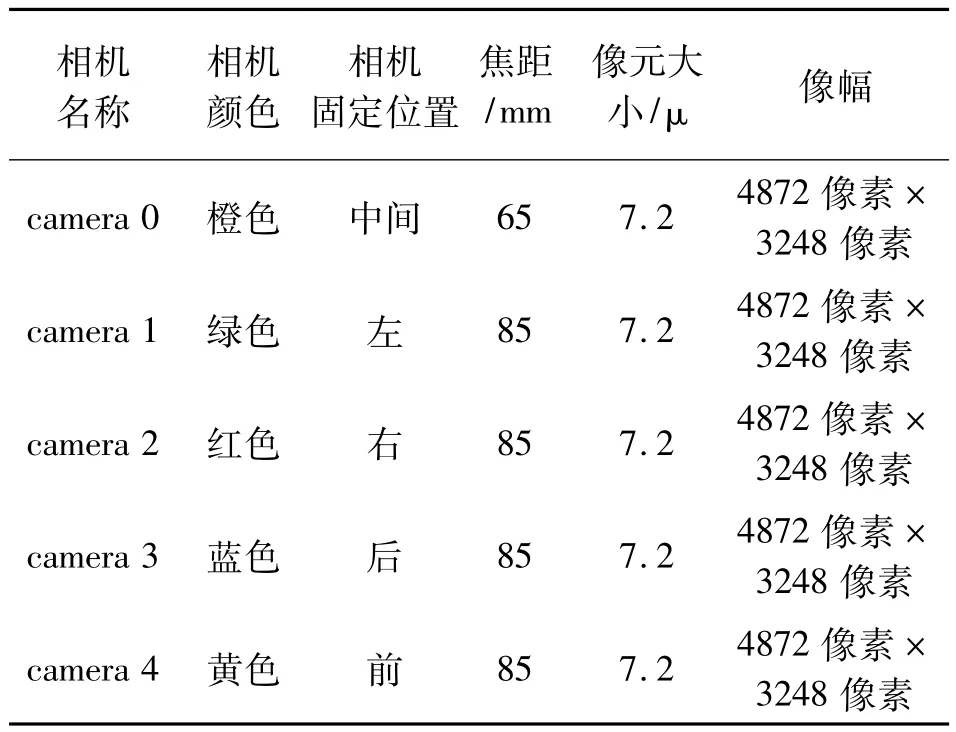
表1 相机固定位置及技术参数
3)POS AV。Pictometry倾斜摄影系统中POS型号为POSAV510。
(3)倾斜摄影成像机理
倾斜摄影相机工作时,5个镜头并非同时曝光,而是不同的相片重叠度采用不同的曝光顺序。一般旁向取30%重叠度,航向取66%重叠度,其曝光顺序为CRF、C、L、C、B。其中,C 代表中心正摄镜头;R代表右侧镜头;F代表前侧镜头;L代表左侧镜头;B代表后侧镜头。曝光间隔一般小于1 s,但一组曝光要持续几秒。图2为一组曝光所采集影像示意图,图3为采集到的相邻位置正摄与倾斜影像示意图[5]。
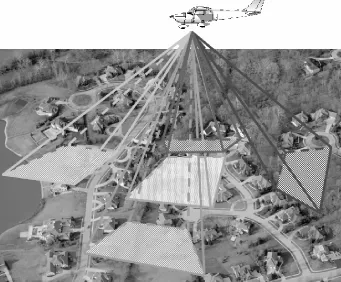
图2 一组曝光采集影像示意图

图3 相邻位置正摄与倾斜影像示意图
三、全自动快速三维实景城市生产技术路线
图4为全自动快速三维实景城市生产技术路线图。在数据获取阶段,本文采用Pictometry倾斜摄影系统进行数据获取;在数据处理阶段,采用Street Factory三维建模技术进行空中三角测量、全自动匹配三维模型、构建TIN模型和贴纹理。
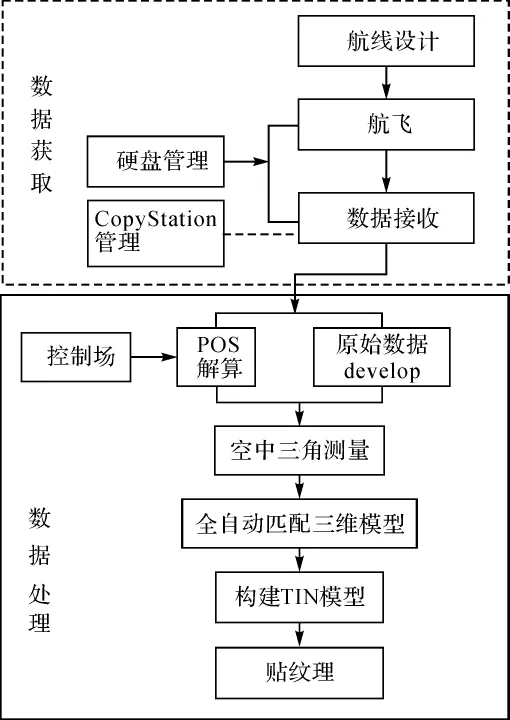
图4 全自动快速三维实景城市生产技术路线
四、基于倾斜摄影技术的常州市三维城市生产实例
1.测区概况
江苏省常州市地处长江三角洲西部,太湖平原西北,北纬31°09'~ 32°04',东经119°08'~ 120°12'之间。地貌类型属冲积平原,境内地形复杂,山区平圩兼有,境内地势西北略高,东南略低。常州地处中纬度,离海较近,属北亚热带季风性湿润气候区。本项目测区地势相对平坦,数据涵盖钟楼、新北开发区,主要集中在钟楼商业区,共42 km2。
2.航线设计
航线设计采用CountyPlanner航线设计软件进行设计。常州项目测区面积为42 km2,飞机飞行相对航高为860 m,飞行时间计划为3 h,测区航线条数为30条,影像地面分辨率为10 cm,正射影像航向重叠度为66%,旁向重叠度为30%。控制场面积为6 km2(2 km×3 km),航线条数为2条。航线设计分布如图5所示,图5中左侧为控制场航线设计图,右侧为测区航线设计图。
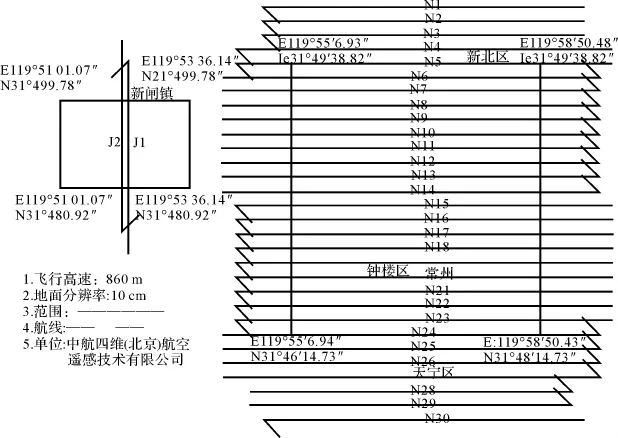
图5 控制场和测区航线设计
3.全自动快速三维模型生产
(1)技术特点和成果特点
1)技术特点。利用StreetFactory进行三维场景自动生成,其自动程度高,可全自动进行正摄影像与倾斜影像的联合空中三角测量,全自动化构建三维模型,全自动化贴纹理形成最终三维真实场景;其建模效率高,建模效率高达4 h/km2。
2)成果特点。纹理真实、建筑物模型真实、能表现细部特征、精度高。
(2)空中三角测量
空中三角测量是对正摄影像与倾斜影像进行联合空中三角测量。首先将数据导入到系统中,共导入了4800张影像,并将全部影像作空三和纠正处理,图6为正摄影像的分布情况;然后自动匹配同名点,共匹配出同名点数量4万个,图7为同名点分布情况,图8为匹配出的同名点结果。其精度在0.3~0.4个像素,这一精度结果将决定下一步三维建模的精度,利用空三的结果和影像分辨率估算模型精度在25 cm左右。
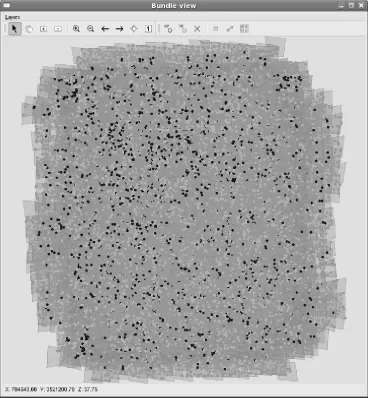
图6 正摄影像分布情况
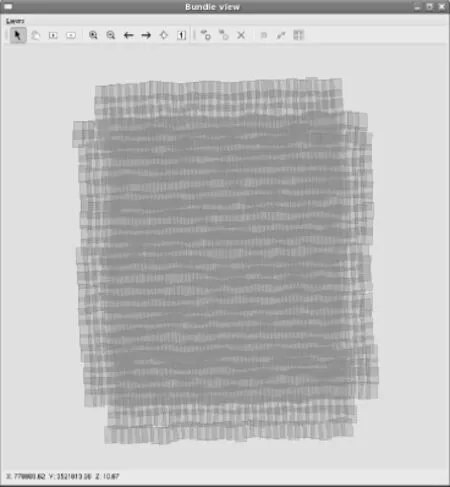
图7 自动匹配同名点图

图8 匹配的同名点结果精度
(3)构建三维模型(TIN)
由于任何一个物体都可以用多个三角网来构建,所以本文中三维模型的构建是通过匹配模型对来构建不规则三角网(TIN),以进行三维建模。TIN的大小取决于地物的复杂程度、相片的重叠度。如果影像的重叠度高,有足够的模型对,并且建筑物比较复杂,则构建的TIN密度会很高,格网尺寸会较小;反之,格网尺寸则会较大,TIN密度较低。图9为楼体的三维模型构建图,从侧面来看,阳台(突出的部分)也能够很好地构建出来,其中在阳台的部分TIN的密度较高,在墙体的部分TIN的密度较低。图10为拱桥三维模型的构件图。
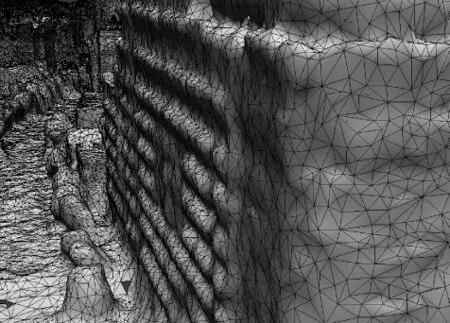
图9 楼体三维模型构建图

图10 拱桥三维模型构建图
(4)贴纹理
三维实景城市生产的绝大部分工作量集中在为三维模型贴纹理。三维模型贴纹理是三维建模关键的一步,而纹理的选取是体现实景的关键所在。本项目是从完成空三的倾斜影像上全自动提取位置相对应的纹理信息,并将其贴到对应的模型面上,从而完成三维实景城市的生产。由于倾斜影像上的纹理记录的是真实地物纹理信息,因此三维模型的显示与真实物体保持一致。图11(a)为建筑物三维模型白膜,图11(b)为贴纹理的三维模型,从图11(b)中可以很清楚地看到建筑物顶部镂空部位也被很好地构建并真实地显示出来。

图11 建筑物白膜及建筑物贴纹理后
(5)常州市三维实景城市结果浏览
图12为常州市三维真实场景,图13为三维模型单体建筑物展示。
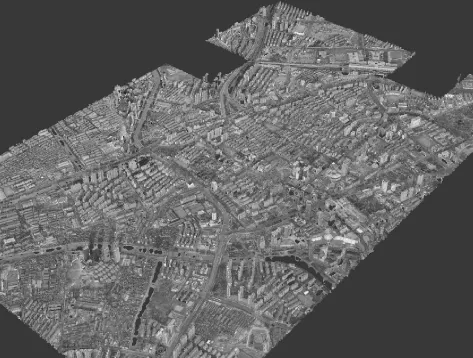
图12 常州三维真实场景

图13 三维模型单体建筑物展示
五 、结论和展望
本文利用倾斜摄影技术和Street Factory三维建模技术完成了江苏省常州市全自动三维实景城市生产。其建模效率在4 h/km2,是传统建模方法的数倍;同时,此方法在模型细节上体现很好,可以将建筑物镂空部分、小突出部分等构建出来;并且,解决了采集真实纹理困难、效率低下的难题,真正实现了全自动快速三维实景城市的生产。但其也仍然存在一些问题,现将这些问题及今后的工作方向总结如下:
1)此方法构建的三维模型是全自动构建,并自动贴纹理,有时会出现建筑物不完整及纹理变形等问题,需要后期手动修正,如何修正以达到所需效果是下一步工作方向。
2)此方法构建的三维模型是基于不规则三角网的模型,道路、树木等都是这样构建的,整个成果是一个大场景,如何对数据分层也将是下一步研究作的重点。
[1]胡志超,张鸿儒.基于数字摄影测量技术的城市三维仿真系统的建设与应用——以长沙大河西先导区三维规划审批系统为例[J].城市勘测,2011,8(4):35-39.
[2]HOHLE J.Photogrammetric Measurements in Oblique Aerial Images[J].Photogrammetrie Fernerkundung Geoinformation,2008(1):7-14.
[3]PETRIE G.Systematic Oblique Aerial Photography Using Multiple Digital Frame Cameras[J].Photogrammetric Engineering & Remote Sensing,2009(2):102-107.
[4]王伟,黄雯雯.Pictometry倾斜摄影技术及其在3维城市建模中的应用[J].测绘与空间地理信息,2011,34(3):181-183.
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
快乐语文(2021年15期)2021-06-15
华人时刊(2021年23期)2021-03-08
童话世界(2020年13期)2020-06-15
软件(2020年3期)2020-04-20
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
北方音乐(2017年4期)2017-05-04