游艇自动停靠控制系统
2013-12-10 14:07:04兰州交通大学齐雪梅
电子世界 2013年4期
兰州交通大学 齐雪梅
1.引言
现今随着水上旅游项目的发展,乘坐游艇成为越来越多人们出游的选择,特别是南方沿海的一些旅游景点,游艇更是必不可少之物。因此相应的游艇停靠就给人们带来了不便。自动化游艇停靠控制系统就是针对目前游艇停靠方面的不便而设计的,它的主要功能就是当游艇将要进入停靠港时,只要游艇给总控制室一个信号,系统就会启动,同时发出信号指引游艇进入空闲的泊位停靠并对游艇进行自动固定,省去了靠人力固定游艇所带来的麻烦。当游艇要出港时,只要再给总控制室一个信号,控制系统就会再次启动,解除对游艇的固定,此时游艇即可出航。
2.游艇进出港模型的建立
2.1 目前的游艇进出港流程
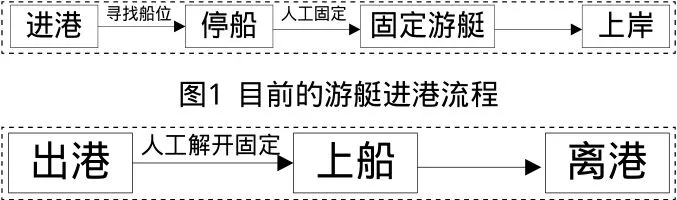
图2 目前的游艇出港流程
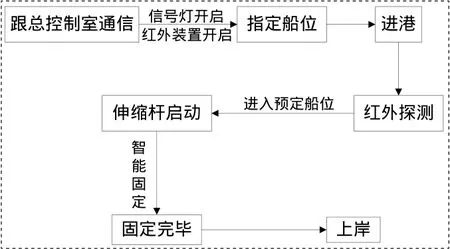
图3 自动化式的游艇进港流程

图4 自动化式的游艇出港流程
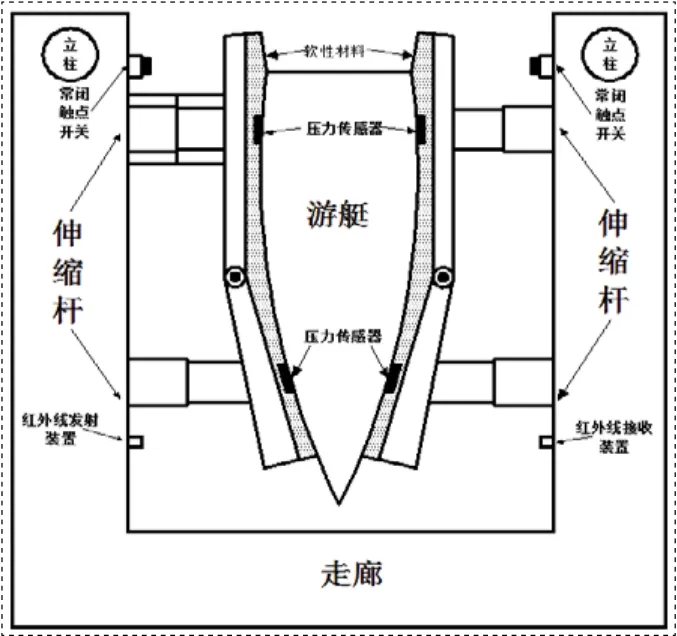
图5 游艇入港固定示意图
目前游艇进港流程如图1所示:游艇进入停泊港找到船位后停船,然后人工将船固定好,然后再离去。
目前游艇出港流程如图2所示:当游艇出港时,需要人工解开固定游艇的绳索,然后游客上船后游艇就可以离开了。
这种流程属于传统的游艇进出港流程,在这种流程下,游艇在停靠时游客还要自己动手系好游艇,在游玩时还要担心游艇的固定是否牢固,这样就给游客带来一定的顾虑。
2.2 自动化游艇进出港流程
自动化游艇停靠控制系统是为适应新形势下游艇旅游业的发展而设计的,它不需要现场人工操作,完全依靠控制系统发出的指令来完成游艇的停靠与固定,出色地解决了传统模式下游艇停靠带来的不便,免去了游客在游玩过程中的后顾之忧。图3、4分别为自动化游艇停靠控制系统控制下的游艇进出港流程。
通过以上工艺流程,我们可以看出在自动化游艇停靠控制系统控制下的游艇进出港与之前相比最大的不同之处就在于游艇进出港完全是自动的过程,不需要人工操作,同时还体现了一定的智能化。具体的控制过程如下:
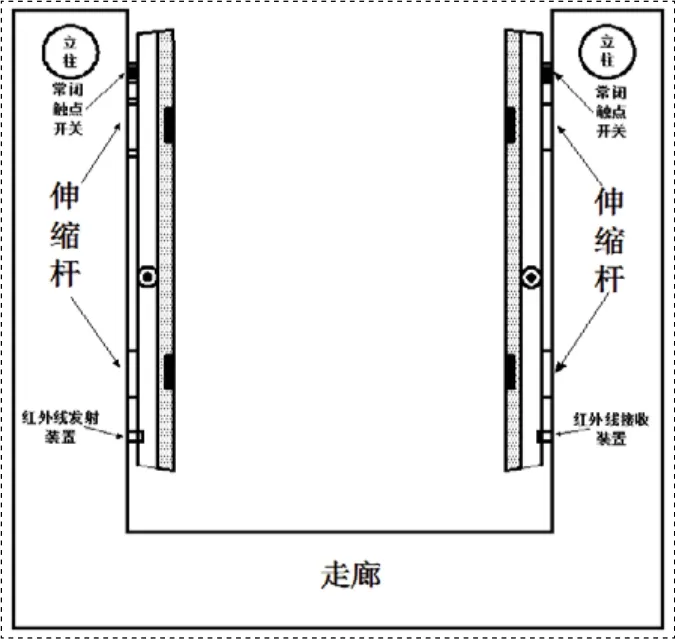
图6 游艇出港解开固定示意图
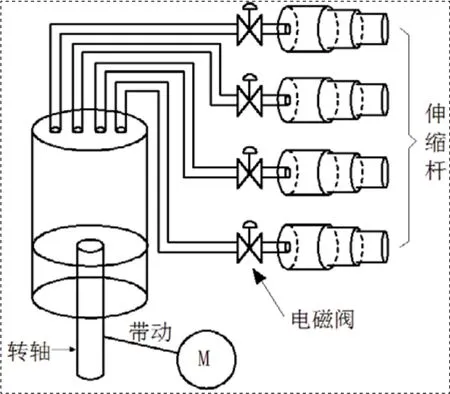
图7 伸缩杆工作过程简图
当游艇即将入港时向总控制室发出一个信号,总控制室接收到信号后启动控制系统使系统开始运行,此时位于立柱上的灯开始发光表明游艇可以驶入该停靠泊位,同时走廊一边的红外线发射装置开始发射红外线而另一边的接收装置就开始接收红外线,当游艇完全进入停靠位置时船头会切断红外线,经过一段延时后液压装置开始启动使位于走廊两内侧的伸缩杆向位于中间的游艇延伸来固定游艇。伸缩杆前端与游艇接触处安装有压力传感器,当伸缩杆挤压游艇的压力达到能够固定住游艇时伸缩杆就会停止伸长,此时游艇被完全固定住同时系统自动切断电源(见图5)。
当游艇要出航时,游客可以通过游艇控制室内的电话给总控制室一个信号,总控制室接收到信号后启动系统,此时随着系统的运行,固定游艇的四个伸缩杆会慢慢地收回到走廊的两内侧(见图6),当伸缩杆碰到位于走廊内侧的常闭触点开关时,使开关断开,此时电动机停止工作,伸缩杆停止,然后游艇就可以出航了。
2.3 伸缩杆的具体工作过程
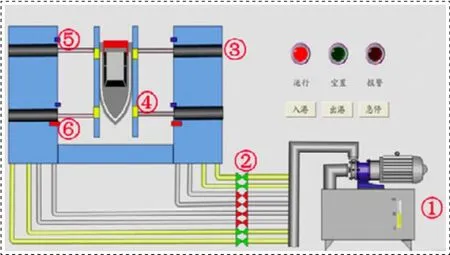
图8 系统模型
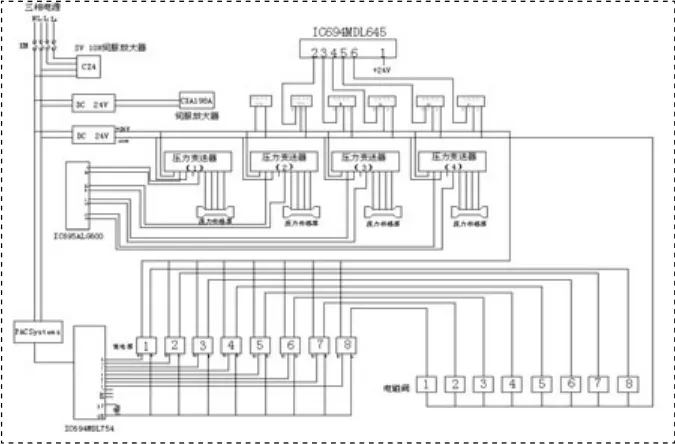
图9 系统原理图
四个伸缩杆的伸缩主要靠液压装置来控制,而液压装置中液体流量及流速的大小又通过电磁阀的开通大小来决定。压力传感器接收到来自船体的压力控制电磁阀的开关过程进而影响伸缩杆。具体工作过程为:电动机转动带动液压装置运动使装置内的液体压入伸缩杆,当伸缩杆碰到船壁时,压力传感器接收到信号控制电磁阀的开度进而控制流入伸缩杆内液体流速的大小,从而控制伸缩杆的伸缩速度,当压力足够大时,压力传感器控制电磁阀关闭,伸缩杆停止伸缩(如图7)。
2.4 自动化游艇系统原理及实现功能
图8是系统模型,整个系统的原理图如图9。
3.系统模型的控制器
本系统模型采用GE Fanuc公司生产的PACSystems的控制器PACSsystems Rx3i。
PACSystems RX3i的特点是具有单一的控制引擎和通用的编程环境,提供应用程序在多种硬件平台上的可移植性和真正的各种控制选择的交叉渗透。易于集成,为多平台的应用提供空前的自由度,能统一过程控制系统,并可以更灵活、更开放地升级或者转换。在Proficy Machine Edition的开发软件环境中,它单一的控制引擎和通用的编程环境能整体上提升自动化水平。它具有下列优点:
(1)把一个新型的高速底板(PCI-27MHz)结合到现成的90-30系列串行总线上;
(2)具有Intel 300MHz CPU(与RX7i相同);
(3)消除信息的瓶颈现象,获得快速通过量;
(4)支持新的RX3i和90-30系列输入输出模块;
(5)大容量的电源,支持多个装置的额外功率或多余要求;
(6)使用与RX7i模块相同的引擎,使得容易实现程序的移植;
(7)RX3i还使用户能够更灵活地配置输入、输出;
(8)具有扩充诊断和中断的新增加的高速的输入、输出;
(9)具有大容量接线端子板的32点离散输入、输出。
RX3i Systems模块主要分为以下几部分:背板、模拟量模块、电源模块、开关量模块、CPU、特殊模块、以太网通讯模块、分布式I/O通讯模块、通讯模块、扩展模块。
4.总结
中国游艇经济蓬勃的发展前景,吸引了大批海外客商的目光。游艇业在国外被称为“漂浮在黄金水道上的巨大商机”。中国游艇经济开发已经启动,游艇业很可能在不远的将来成为又一个消费“制高点”。
自动化游艇停靠控制系统完全摆脱了人为固定游艇的传统方式,实现了游艇固定的全自动化,大大提高了游艇停靠的速度,为游艇旅游业的大力发展提供了有力的保证,为中国游艇行业进军世界提供了坚实的基础。
[1]常用电器与GE PACSystems控制技术[M].
[2]廖常初.PLC编程及应用[M].北京:机械工业出版社,2005.
[3]江晓平.PLC可编程控制器系统开发实例导航[M].北京:人民邮电出版社,2004.
[4]周万珍,高鸿斌.PLC分析与设计应用[M].北京:电子工业出版社,2004.
[5]马香峰等.工业机器人的操作机设计[M].北京:冶金工业出版社,1996.
[6][美]Mikell P.Groover著.许嵩,李志忠译.自动化、生产系统与计算机集成制造(第5版)[M].北京:清华大学出版社,2009.
[7]任致程.传感器、变送器、智能数显控制器应用手册[M].北京:中国电力出版社,2007.
[8]漆汉宏.PLC电气控制技术[M].北京:机械工业出版社,2007.
[9]GE Pro fi cy HMI/SCADA iFIX Fundamentals(上)(下).
猜你喜欢
智族GQ(2024年5期)2024-06-03 22:33:57
小猕猴智力画刊(2024年3期)2024-04-15 20:11:20
民航管理(2022年5期)2022-07-07 09:22:56
消防界(2021年19期)2021-11-14 12:14:40
消防界(电子版)(2021年19期)2021-11-04 08:34:06
环球时报(2019-11-06)2019-11-06 04:14:24
经营者(2018年23期)2018-03-06 08:18:10
水运管理(2017年11期)2018-01-02 00:08:54
中国港湾建设(2017年11期)2017-12-19 12:27:01
化工设计通讯(2017年3期)2017-03-03 14:22:03