
一种嵌入式无线车辆信息采集系统设计*
2013-12-07 06:54杨之乐林小玲韩正之
传感器与微系统 2013年2期
吴 帆,杨之乐,林小玲,韩正之
(1.上海交通大学电子信息与电气工程学院,上海200240;2.上海大学机电工程与自动化学院,上海200072)
0 引言
物联网,就是通过信息传感设备,按约定的协议,将任何物品与互联网连接起来,进行信息交换和通信,以实现智能化识别、定位、跟踪、监控和管理的一种网络[1]。它在各种创新型技术的支持下得到发展,代表着通信和计算机技术未来的革命。智能交通系统(ITS)是物联网研究的关键领域,它用来实现对交通的实时控制与指挥管理。而车辆信息采集被认为是ITS的关键子系统,是交通智能化的前提[2]。本文提出一种低功耗、易安装维护、功能全面的基于嵌入式S3C6410的无线车辆信息采集系统,将嵌入式控制平台、无线采集、无线变送、磁阻新型测量等技术融为一体,解决了传统车辆采集系统成本高、体积功耗大、安装维护不方便等问题,系统采用太阳能供电,独立性强,具有广阔的应用前景。
1 系统总体设计
车辆信息采集系统是一种安装在现场的前端设备,它主要完成车辆的速度、流量数据获取和将获取的信息作简单处理后传输到交通信息处理中心。由于它是物流信息的来源,它的可靠性、有效性与准确性就受到特别的关注。目前,常用的测速方法有环形线圈测速、雷达测速、激光测速和视频测速等[3]。这些方法虽然具有体积小,易于安装或测试精度不受环境影响等优点,但存在安装调试和使用维护要求高等不足。为此,本文提出一种基于S3C6410和WinCE的交通信息监测系统,其结构框图如图1所示。
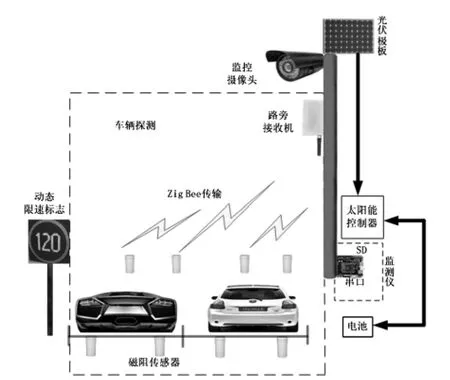
图1 系统总体设计Fig 1 Overall design of system
车辆探测器是监测系统感知研究对象的最前沿端,主要用于获取检测对象的物理特性参量信号。图2所示为车辆信息采集系统功能设计图。本系统的车辆探测器采用中交智能工程有限公司的YTS-E存在型车辆探测器包括埋地部分的车辆检测器与路旁的信号接收机。埋地部分车辆检测器与接收机间的通信采用Zig Bee方式,Zig Bee是一种介于无线标识技术和蓝牙技术之间的技术提案[4],具有低功耗、短时延、免执照、低成本等优点,因而非常适合于短距离无线传输。无线车辆探测器埋于路面以下的磁阻传感器每个车道放置2对,将检测到的车辆通过的信息用Zig Bee方式传给路边的接收机[5]。
监测仪是现场监测系统的信号处理控制中心,其主要硬件构成包括S3C6410嵌入式微处理器、COM口、CAMERA接口、TFT-LCD触摸屏、SD卡以及GPRS无线网卡等。
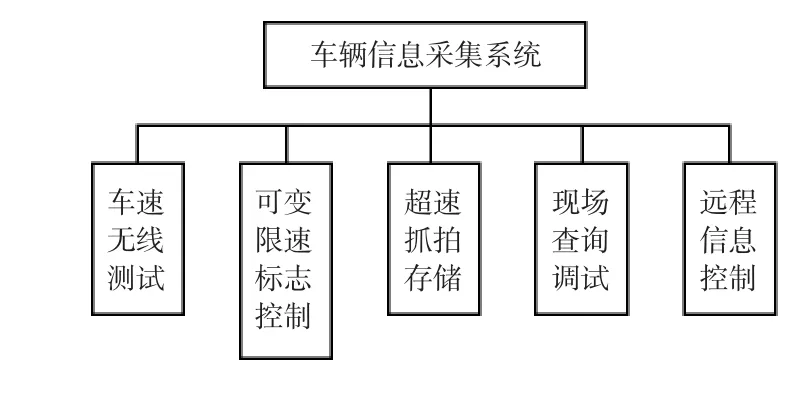
图2 系统功能设计Fig 2 Functions design of system
为保证系统能在无市电的荒郊野外也能长期、持续工作,供电方式采用太阳能供电。太阳能供电部分要针对不同设备提供不同的供电电压,12 V的输出可以供给监控摄像头、车辆探测器的路旁接收机,以及LED动态限速标志。而监测仪需要的5V电压,则可用光伏充放电控制器通过BUCK降压斩波电路来实现[6]。
2 系统硬件平台设计
硬件结构如图3所示,主要包括S3C6410微处理器、电源、串口、网卡、LCD触摸屏等。

图3 硬件结构框图Fig 3 Block diagram of hardware structure
三星公司嵌入式处理器S3C6410采用64/32 bit内部总线架构,并集成了多个功能强大的硬件加速器。S3C6410有极佳的外部存储器接口能力,可以满足高端通信业务的带宽要求。
RS-232接口是计算机上的通信接口,在这里实现探测器接收机与S3C6410控制器的通信。控制器将接收到的数据进行分析处理后,发出超速抓拍的指令,再将监控摄像头对违章车辆的抓拍图片保存到SD卡里。CAMERA或USB接口可以用来连接监控摄像头,测试中使用的是CAMERA接口。1.27mm间距双排插针接口可以连接TFT触摸屏,用来进行现场设备调试。由于抓拍图片的信息不要求实时反映至交通信息处理中心,因而,可以使用SD卡存储一段时间或一定容量的图像数据包,再通过GPRS进行传输,然后,清空SD卡继续存储。
3 系统软件设计
系统中,无线磁阻车辆探测器与控制器是通过串口进行通信,从而实现车辆信息的检测。文中通过对WinCE下的串口编程的介绍和对超速检测、图像采集的应用程序设计方法的详述,阐释了该无线车辆采集系统的应用层程序设计。
3.1 基于MFC的应用程序开发
微软基础类(microsoft foundation classed,MFC)库通过面向对象的方式将SDK进行封装,使用户在使用API函数时更加方便简单。对话框编程作为一种MFC应用程序的编写方式,其最大优点是可以可视化编辑串口界面,为开发者节省很多界面设计的时间。
3.2 WinCE下的串口编程
WinCE相比于Linux,以其良好的界面、强大的功能、类似桌面Windows操作系统的编程环境,以WinCE为平台的各类终端迅速普及。本文选用WinCE操作系统进行应用程序开发。本系统使用串口作为无线车辆采集系统与车辆探测器的通信方式,在PC机Visual Studio 2005的编译环境下利用MFC编写操作界面,然后,用交叉编译的方式通过串口将程序烧写进系统中,搭配触摸屏,即可实现车辆信息的检测和显示[7]。
3.3 超速和抓拍程序设计
本系统主要实现车辆的感知和高速公路车速的测量。基于综合考虑公路交通流、天气等影响因素,在平衡设计速度与安全运行速度的基础上,我国有很多路段已经实行了隧道群限速和恶劣气候条件动态限速等形式。
超速和抓拍程序的实现方法是:当开始运行监控后,通过一个大循环实现不停地发送保持车辆探测器接收机的看门狗正常工作不复位的报文,从而实现对串口数据的正常读写[8]。由于车速的检测是根据车辆通过2对检测器的时间间隔与检测器的间距间接计算所得,所以,用了2个if语句的嵌套进行判定,在进入第一个if,即检测到车子通过第一组磁阻检测器后,要不断地监听串口,才能检测到车子是否经过了第二组磁阻检测器;进入第二个if判定之后,可以在其内部进行超速判定和抓拍,即在给出了进行精确抓拍的控制触发信号。系统应用程序实现的流程如图4所示。

图4 软件流程图Fig 4 Flow chart of software
4 系统实现与测试
为了检测系统的可用性,进行了现场测试。由于Zig Bee工作在2.4 GHz超高频,因此,不会受到车辆行进过程中的其他噪声的干扰。磁阻传感器配套有环氧树脂保护筒,耐压、防水、防腐蚀,且对无线通信干扰较小。为了便于测试,安放2对间隔2 m的检测器,设定违章车速为30 km/h。安排车辆以不同车速通过监测区域,实验过程如图5所示。检测器将采集到的检测信号以无线传输方式实时发送给实验室里放置的路旁接收机。路旁接收机将接收的数据通过串口传递给控制器,控制器对数据进行分析处理后实现超速抓拍。
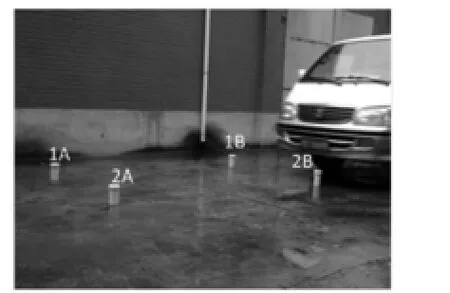
图5 车辆速度检测Fig 5 Detection of vehicle speed
根据面包车上仪表盘的时速显示,该系统基本实现较为准确地测速并能及时拍下超速车辆照片,并将抓拍的图像保存在SD卡中。保存的文件名可以显示抓拍的日期和时间,精确到秒,并且显示出超速车辆的行驶速度。
将现场测试的结果与约定标称值进行比较,如表1所示,做了3种类型的各3次测试,并计算了平均误差,验证了系统的可行性。
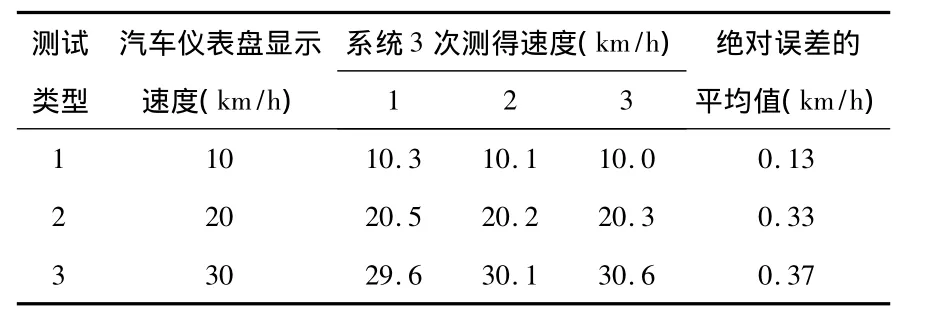
表1 测试表格Tab 1 Testing table
5 结束语
系统采用高性能处理器S3C6410和嵌入式操作系统WinCE,结合磁阻和Zig Bee无线传输技术,实现了车速检测和抓拍存储功能,具有低能耗、易于维护等特点,可全套采用太阳能供电。在后续研发中,由于系统采用的ARM11处理器集成了各种外设,扩展性强,可进一步实现车辆占有率、雨量、雾浓度等信息采集,为智能交通系统提供了实时全面的前端数据,形成一套更为完整的车辆信息监控系统。该系统设计对物联网在智能交通的应用具有一定参考价值。
[1]Tan Lu,Wang Neng.Future Internet:The Internet of things[C]∥The 3rd International Conference on Advanced Computer Theory and Engineering(ICACTE),2010:376-380.
[2]谢 辉,董德存,欧冬秀.基于物联网的新一代智能交通[J].交通科技与经济,2011(1):33-46.
[3]王庆飞.基于磁阻传感器的高速公路车辆超速检测系统的研究[D].重庆:重庆理工大学,2009.
[4]Willig A.Recent and emerging topics in wireless industrial communications:A selection[J].IEEE Transactions on Industrial Informatics,2008,4(2):102-124.
[5]Cai Baigen,Wei Shangguan,Wang Jian,et al.The research and realization of vehicle detection system based on wireless magnetoresistive sensor[C]∥2009 The Second International Conference on Intelligent Computation Technology and Automation,2009:476-479.
[6]严卫洲,潘俊民.基于MPPT的太阳能光伏充电控制器研究[J].电工技术,2009(3):85-86.
[7]周立功.ARM&WinCE实验与实践[M].北京:北京航空航天大学出版社,2007.
[8]张 莹,朱 军.自动车辆识别系统的设计与实现[J].仪表技术与传感器,2006(1):29-31.
猜你喜欢
防爆电机(2021年4期)2021-07-28
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
电子制作(2016年11期)2016-11-07
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
工业设计(2016年11期)2016-04-16
