潜艇交叉机动发现敌潜艇概率因素分析
2013-12-02 06:07:40李本江李贵彬
舰船科学技术 2013年4期
李本江,高 孟,李贵彬
(海军潜艇学院,山东 青岛266042)
0 引 言
交叉机动是潜艇反潜封锁的重要机动样式[1-2]。如何运用交叉机动样式以达到最佳的封锁效果,需要对影响反潜潜艇发现敌潜艇概率的影响因素进行分析。本文利用蒙特卡罗方法对影响因素进行仿真实验,并与垂直敌航向的往返直线机动作比较,可以为潜艇平台运用交叉机动反潜封锁提供一定的辅助决策依据。
1 反潜封锁与交叉机动样式
反潜封锁是指将反潜兵力或兵器部署在敌潜艇基地、驻泊点,以及海峡、水道和己方海军基地等敌潜艇必定或经常出入的海域进行阵地设伏,通过毁伤或威慑的方法阻止敌潜艇通过该海域,迫使敌潜艇绕远道进入作战区和返航,进而缩短其在作战区的时间,达到削弱敌潜艇威胁、保护己方兵力不被敌潜艇攻击,夺取与保持制海权的目的[3-4]。
反潜潜艇进行反潜封锁时的搜索机动样式主要有平行于敌潜艇可能航向的往返机动搜索、垂直于敌潜艇可能航向的往返机动搜索和“8”字形(或称交叉)机动搜索等[5-6]。交叉机动是指单艘反潜潜艇沿交叉航向实施机动的搜索方法,如图1所示。反潜潜艇从O1点机动到O2点,然后从O2点机动到O3点,再从O3点机动到O4点,最后从O4点机动返回至O1点,这样循环往复下去。其中从O2点向O3点机动和从O4点机动到O1点的航向与敌潜艇的可能航向平行。
图1 交叉机动样式示意图Fig.1 Cross manoeuvre sketch map
2 交叉机动搜索发现敌潜艇概率的影响因素
在敌潜艇的航速和机动宽度W 一定的情况下,影响反潜潜艇发现敌潜艇概率的因素主要有反潜潜艇的航速、声呐的作用距离,机动的纵深L。
2.1 系统仿真设置
为便于仿真计算作如下假设:
1)由于双方作战环境基本相同,发现对方的距离比较近,当敌潜艇突破反潜潜艇交叉机动线时,突破点是任意的,敌以平均概率穿越交叉机动线;
2)反潜潜艇声呐探测范围是以ds 为半径的圆;
3)当敌潜艇与反潜潜艇的距离小于或等于ds时,敌潜艇即被发现;
4)交叉机动宽度W 为150 n mile,敌潜艇速度Vt为4 kn,反潜潜艇速度为Vd。
2.2 交叉机动的纵深对发现概率的影响
当反潜潜艇发现敌潜艇的距离分别为3 n mile,5 n mile 时,机动纵深L 对发现概率P 的影响如图2和图3所示。
由图2 和图3 可见,机动纵深对反潜潜艇发现敌潜艇的概率影响较为明显,并存在突变点。在反潜潜艇航速为4 kn 的情况下,机动纵深8 n mile 封锁效果比较好;在航速为8 kn 的情况下,机动纵深16 n mile 封锁效果比较好;在航速为12 kn 的情况下,机动纵深24 n mile 封锁效果比较好。
图2 反潜潜艇发现敌潜艇距离为3 n mile 时机动纵深对发现概率的影响Fig.2 When detecting distance of sonar is 3 n mile,the influence of manoeuvre depth on detecting probability

图3 反潜潜艇发现敌潜艇距离为5 n mile 时机动纵深对发现概率的影响Fig.3 When detecting distance of sonar is 5 n mile,the influence of manoeuvre depth on detecting probability
2.3 交叉机动搜索速度对发现概率的影响
假设声呐探测距离不随反潜潜艇速度的改变而变化。当反潜潜艇声呐探测距离分别为3 n mile,5 n mile 时,交叉机动搜索速度Vd对发现概率P 的影响如图4 和图5所示。

图4 反潜潜艇发现敌潜艇距离为3 n mile 时交叉机动速度对发现概率的影响Fig.4 When detecting distance of sonar is 3 n mile,the influence of manoeuvre velocity on detecting probability

图5 反潜潜艇发现敌潜艇距离为5 n mile 时交叉机动速度对发现概率的影响Fig.5 When detecting distance of sonar is 5 n mile,the influence of manoeuvre velocity on detecting probability
由图4 和图5 可见,在反潜潜艇机动纵深分别为8,16 和24 n mile 情况下,反潜潜艇分别采用4,8 和10 kn 速度航行的封锁效果是比较好的。
2.4 声呐探测距离对发现概率的影响
反潜潜艇机动纵深L 为8 和16 n mile,反潜潜艇速度Vd为8 kn,声呐探测距离ds 对发现概率P的影响如图6所示。
图6 声呐探测距离对发现概率的影响Fig.6 The influence of detecting distance of sonar on detecting probability
由图6 可见,反潜潜艇的声呐探测距离与反潜潜艇发现潜艇的概率是正相关的。
3 垂直敌航向的往返直线机动
垂直敌航向的往返直线机动是潜艇反潜封锁的基本方法,如图7所示。1 艘反潜潜艇在垂直敌航向的巡逻线上沿1 个方向搜索,在巡逻线的结束点转向180°继续反向搜索,直到巡逻线的开始点,再转向180°继续搜索,依此类推。

图7 垂直敌航向的往返直线机动示意图Fig.7 Manoeuvre of vertical enemy courses beeline sketch map
敌潜艇航速4 kn,反潜潜艇在声呐探测距离3和5 n mile,速度4,8 和12 kn 的情况下发现敌潜艇概率的仿真结果见表1。
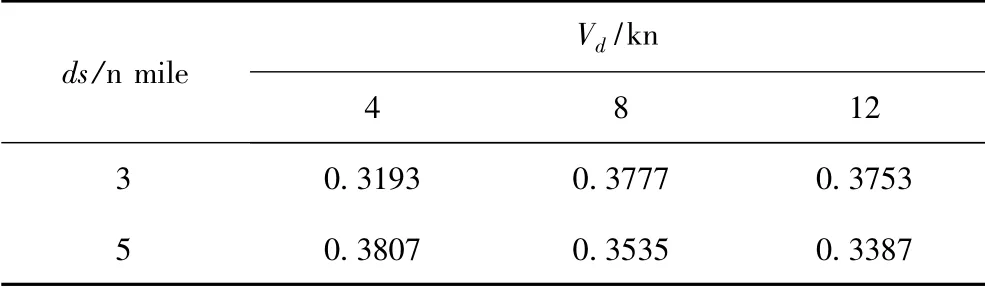
表1 反潜潜艇发现敌潜艇概率Tab.1 Detecting probability of anti-sub submarine
4 结 语
通过以上仿真分析可知:反潜潜艇与敌潜艇相比在速度没有优势的情况下,采用垂直敌航向的往返直线机动比交叉机动封锁效果要好,反潜潜艇如果速度有优势,则采用交叉机动封锁效果好;在敌潜艇速度及机动宽度一定的情况下,潜艇交叉机动反潜封锁发现潜艇的概率受反潜潜艇速度、声呐探测距离、机动纵深影响存在突变点,声呐探测距离与反潜潜艇发现潜艇概率是正相关的。因此,潜艇在进行交叉机动反潜封锁时,应当根据封锁的正面宽度、敌潜艇的大概航速、发现敌潜艇的大概距离,合理的选定机动纵深及航速,以使反潜潜艇发现敌潜艇的概率最大。当反潜潜艇机动宽度为15 n mile,敌潜艇航速为4 kn,声呐探测距离为3 和5 n mile的情况下,反潜潜艇采用8 kn 航速和160 n mile 机动纵深的封锁效果最好;如果在目标速度、声呐探测距离不确定的情况下,反潜潜艇最好采用垂直敌航向的往返直线机动。
[1]海军装备论证中心.国外反潜作战[M].北京:海军出版社,1987.
Navy Equipment Argument Center.Foreign Antisubmarine[M].Beijing:Navy Press,1987.
[2]Surface Warfare Development Group.ASW screen planner TDA user manual[M].Norfolk:TACMEMO SWDG 3-21.
[3]The future role of undersea warfare[J].Naval Forces,2002(2).
[4]Antisubmarine warfare in shallow waters[J].Naval Forces,2000(1).
[5]赵晓哲,沈治河.海军作战数学模型[M].北京:国防工业出版社,2004.
ZHAO Xiao-zhe,SHEN Zhi-he.The Model of Navy Operation[M].Beijing:National Defense Industry Press,2004.
[6]WASHBURN A.4th Search and Dection[M].Linthicum:Institute for Operations Research the Management Sciences,2002.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
新世纪智能(高一语文)(2020年5期)2020-07-24 08:27:12
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
无人机(2017年10期)2017-07-06 03:04:38
声学技术(2014年1期)2014-06-21 06:56:32
军事历史(2004年3期)2004-11-22 07:28:36