针对持续性跟踪无人艇的探测技术
2013-12-02 06:07:38佘亚军
舰船科学技术 2013年4期
田 军,佘亚军,蔡 龙
(1.中国人民解放军海军装备部,北京100071;2.中国船舶重工集团公司第七一九所,湖北 武汉430064)
0 引 言
环视中国周边,从东北亚、东部沿海到南海已成为各国舰艇数量最为密集的区域,其中不乏“弗吉尼亚”等代表世界最高技术水平的核潜艇。这些舰艇长期监视我海军行动,扼守我海军进出岛链的各个关口,对我海军部队构成直接威胁。同时,我国潜艇部队还受到他国反潜侦察部队的特殊关照,美国部署大量间谍船、远洋勘测舰、P-3C 反潜机、EP-3 侦察机等监控我潜艇部队动向,日本装备HSS-2B、P3-X 等多种反潜机来监视我水下舰队[1]。据报道,最近DARPA 提出ACTUV 项目,计划开发一种具有先进的反潜搜索能力、可以独立部署的无人艇,用于对他国潜艇进行长期监视和跟踪,ACTUV 的出现将会对我国潜艇部队安全形成重大挑战[2]。
1 ACTUV 简介
ACTUV 属于反潜无人艇技术的一种。2008年5月,通用公司曾向美国海军交付1 艘舰队级反潜无人艇,可执行海上防御、保护航线、港口监测等反潜战任务,为美国海军水面舰艇战斗群提供有力保护。2010年3月,DARPA 正式启动了ACTUV 项目(见图1),计划建造100 艘持续性跟踪无人艇,部署于第一岛链和第二岛链之间的广大海域,密切注视我潜艇部队的举动。ACTUV 的主要特征有:
1)针对我国核潜艇和常规潜艇的噪声、外形等指标进行设计;
2)排水量157 t,艇长19 m,航速27 kn,续航力3 000 km 以上;
3)装配声呐超过3 部,能将监控所得信息实时发送到美军指挥中心;
4)具有强大的推进功能、优越的机动性能、持续跟踪目标能力,突破了隐身技术难题,具有先进的总体性能和改变反潜模式的能力。统计信息是目标的重要特征,得到了目标特征之后可采用最大相关分类器和欧氏距离最近分类器对测试目标进行识别(见图2)。
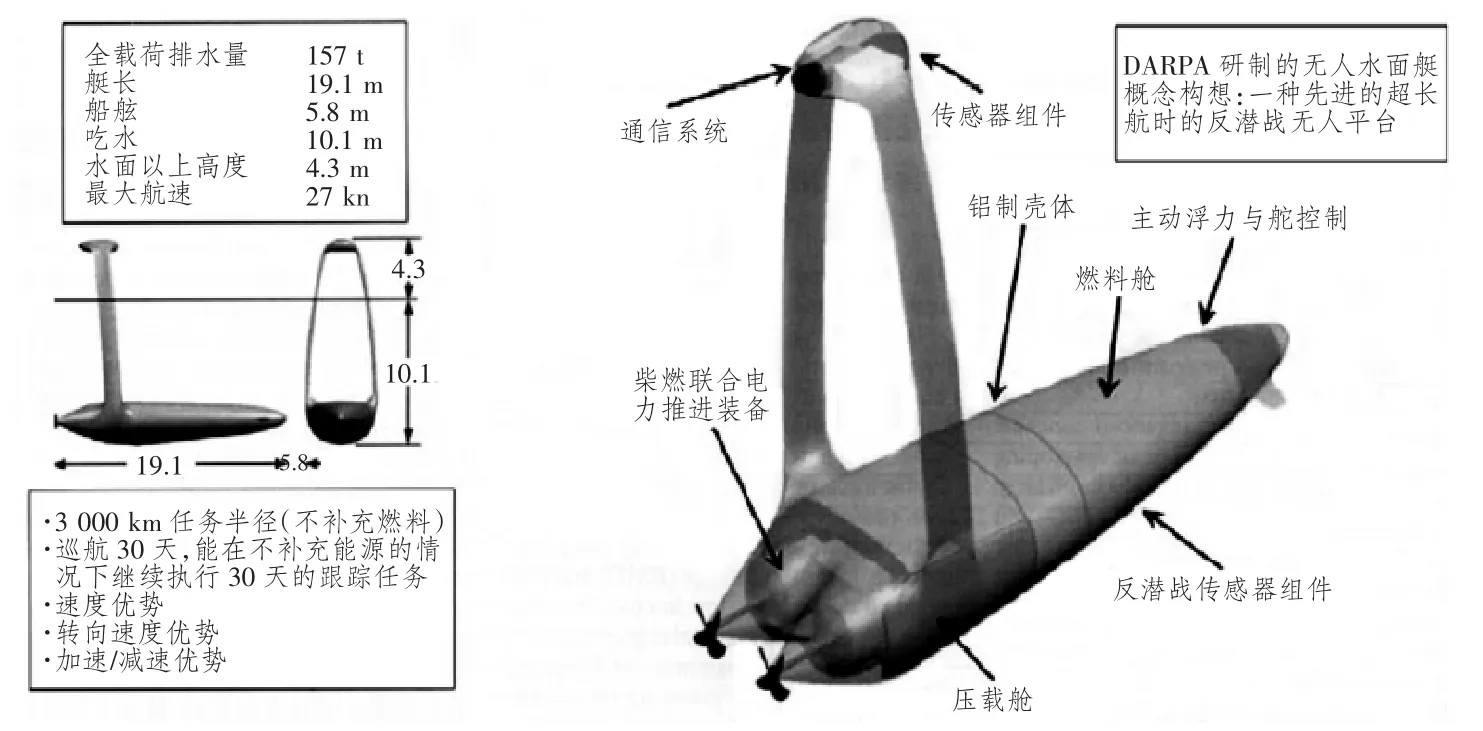
图1 ACTUV 模型Fig.1 The model of ACTUV

图2 SAR 技术目标识别模型Fig.2 The model of SAR technology on target identifiction
2 常规探测方法
如何结合ACTUV 的特点对其进行反制,是海军亟需解决的问题。针对舰艇的探测方法通常有以下三类:
1)天基探测
卫星探测是指利用光学遥感卫星、雷达卫星、侦察卫星等对敌舰艇进行搜索,近年来我国在卫星技术领域已经取得重大突破,可应用于监视ACTUV。
光学遥感卫星通过对目标的方向角进行测量实现目标定位,测量精度受到透视投影、摄影轴倾斜、大气折光等因素的影响,因此必须建立起精确的几何成像模型。对于高分辨率卫星遥感成像而言,建立严格几何定位模型时,必须考虑遥感成像过程中造成影响变形的各种物理因素,如卫星位置、传感器姿态、相机参数等,利用这些几何条件建立起几何模型。
雷达卫星技术分真实孔径雷达成像和合成孔径雷达成像。以合成孔径雷达为例,其性能稳健,不受天气、光照等条件限制,具有全天候的作战能力、广泛应用于舰船目标识别,适合对敌水面舰船搜索与跟踪,但合成孔径雷达图像中包含有大量的海杂波,需要对图像数据进行预处理,以削弱杂波的影响。在进行目标特征提取时,形状信息、轮廓信息、
侦察卫星采用无源定位法对地面电磁波辐射源进行定位[6],主要有测向定位和测时差定位2种技术。由于轨道高度已知,侦察卫星利用单站二维测向法即可完成目标定位。二维测向过程如下:令cosβx和cosβy分别为视线方向的2 个方向余弦,视线方向的第3 个方向余弦值为

可以得到目标相对星下点轨迹的方位角为
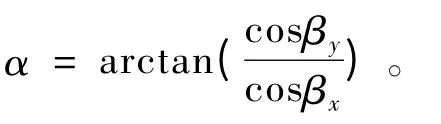
目标与星下点之间的地心张角
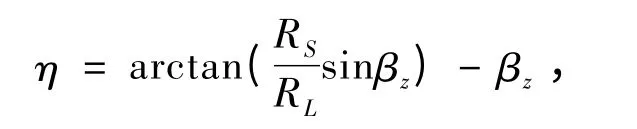
这里RL是地球本地半径,RS是地心与卫星之间的距离。为解决星载二维侦察设备较为复杂的问题,有学者提出在高速自旋卫星上进行一维测向,可以实现目标的准实时定位,且测试设备复杂度降低一半,但一维测向法获得的定位数据精度有所下降。
遥感卫星和雷达卫星探测技术存在着目标姿态敏感性、目标平移敏感性、目标强度敏感性、目标位置精确性等问题,而侦察卫星不受目标状态和外界因素的影响,可以快捷地获得地面目标的大体位置信息,因此适宜监测目标的活动情况。考虑到探测结果传递、后方信息辨识、制定反击方案的实时性问题,侦察卫星适宜探测ACTUV 的活动区域,对其进行准确定位需要结合其他技术。
2)海基探测
声呐在探测敌方舰艇方面具有独特优势,可借鉴美国在全球重点海域实施深海侦听的经验,在重要海域布置分布式被动声呐基阵,基阵之间采用高速通信网络进行互联,实时向岸上基地或部队反馈监视信息,探测ACTUV 行踪。或者利用装配有主动拖曳声呐的声呐监测船进行重点海域的搜索巡逻(见图3)。2 种方法各有优势,分布式声呐基阵具有较好的隐蔽性,部分基阵失效后,剩余基阵能自动握手并重新组网,继续实施对敌侦听;而声呐监测船可以灵活地选择侦察区域,提高探测的针对性。

图3 声呐阵列监测示意图Fig.3 The sketch map of interception sonar array
对分布式声呐基阵探测方法而言,由于阵元布置在不同的位置,目标的声传播路径各异,降低了目标反射信号的信道衰减效应,有效减少了探测盲区,提高对目标的探测概率。分布式基阵数目越大,目标越容易进入基阵的探测区域,同时可探测识别的目标数量越大。相比卫星技术,声呐技术能够实现目标方位定位和距离定位。方位定位能力依赖基阵的布阵大小,基阵布阵越大,波束越窄,指向性越好,对应方位分辨率越高;距离定位可以采用几何定位方法实现(见图4),根据多基地探测的距离矢量值,进行后方交汇计算目标的真实距离。分布式声呐基阵探测方法的不足之处在于:受基阵布置位置及数量的限制、被动声呐实际探测距离较小等因素的影响,这种方式的实际探测效果较为有限。

图4 分布式基阵目标定位Fig.4 Target orientation by distributed array
声呐监测船可以通过装配主动声呐获得较大的探测距离,但主动声呐的探测距离取决于实际的发射功率,只有采取较大功率发射模式才能获得较大的视域,而增加发射功率的同时增大了声呐监测船暴露自身位置的危险性。而且声呐监测船的活动区域较为有限,监测区域只能覆盖局部海域。
3)空基探测
空基探测主要依靠反潜巡逻机实现,我国自行研制的运-8 反潜巡逻机已初步满足巡视重点海域的任务需求,可以应用于对ACTUV 的探测。
反潜巡逻机机动性强、航程远,可装备多种搜索设备和攻击武器,具有以下优势:①能够在短时间内对近海宽阔海域实施巡逻搜索,迅速集中兵力于某一海域,搜索行动具有突然性和高效性;②能够快速与目标建立接触和恢复接触,并可实施快速攻击;③能够对敌舰艇实施隐蔽跟踪,反潜巡逻机在空中跟踪飞行,不易被舰艇发现,降低了舰艇采取摆脱跟踪行动的可能性;④搜攻潜手段多、效率高,反潜巡逻机可装备搜索雷达、声呐浮标、磁探仪、红外搜索仪、反潜鱼雷和深水炸弹等多种搜索和攻击武器。
相比其他探测手段,巡逻机信息量更大,指挥员需掌握各种搜潜手段的战术性能,并需根据不同的目标情况、海域水文情况和战场态势选择相应的搜索手段。针对其战术特点,可以考虑建立反潜作战指挥辅助决策系统,根据不同任务自动生成搜索方案并预测作战行动效果,减轻指挥员负担,提高作战效能。指挥辅助决策系统可以采用两级探测方案进行目标搜索:第一级搜索方案选择,解决声呐浮标、磁探仪、雷达、红外搜索仪和电子监测系统等不同手段的组合问题;第二级搜索方案选择,针对声呐浮标需要布阵使用的特点,对声呐浮标的布阵方案再次进行评估决策。
空基探测的劣势在于反潜机的航程有限,只能实施近海搜索或者特定海域的搜索。
3 多维信息联合定位法
根据前文的分析,独立采用天基探测、海基探测或空基探测等常规手段可以在某些情况下探测到ACTUV的活动海域,但并不能够保证探测结果的稳健性和准确性。本文提出一种结合多种探测手段建立的天基、海基、空基三维探测系统,利用多维信息融合技术达到对ACTUV 目标进行监测以及准确定位的目的。
首先,采用侦察卫星监测ACTUV 与外界进行信息交互时的电磁波信息,在监测到目标活动信息时,利用无线电测向法初步计算ACTUV 活动区域的位置信息;其后,启动海基探测方案与空基探测,利用声呐监测船、海底声呐基阵网络或者航空测量手段,探测ACTUV 的准确位置;最后,根据探测行动获取的数据,进行最优信息融合,提高探测结果的准确性。这里提出一种多维数据信息融合定位方法,提取多维探测数据中的目标信息。


相应得到对ACTUV 目标的定位方程:

将上述方程组写成矩阵形式,可得到线性方程:

式中:

由式(4)可得定位方程解为


4 结 语
本文介绍了ACTUV 的基本情况,以及给我国潜艇部队带来的安全问题,研究从天基、海基、空基3 个方面进行探测,针对3 种方案单独实施时均存在不足的问题,提出联合多种探测手段构建天-海-空三维探测网络,并提出了一种数据融合目标定位方法。这种方法可以应用于对外国舰艇的监测。针对ACTUV 的干扰和打击方法是下一步研究计划。
[1]田英.中国海军反潜体系的未来建设[J].舰载武器,2011(4):31-34.
TIAN Ying.Future development of the PLA Navy′s antisubmarine system[J].Shipborne Weapons,2011(4):31-34.
[2]汪汀.美国国防部预研局从事长自持力的无人反潜器概念研究[J].潜艇技术,2011,6(10):36-37.
WANG Ting.DARPA′ s research on long-term active ACTUV[J].Submarine Technology,2011,6(10):36-37.
[3]范凯,孙东平,向吴辉.潜艇战与反潜战装备发展[J].国防科技,2008,29(5):16-19.
FAN Kai,SUN Dong-ping,XIANG Wu-hui.The equipment development of submarine warfare and antisubmarine[J].National Defense Science &Technology,2008,29(5):16-19.
[4]吴运发,孙乃宏.反潜的关键设备—声呐浮标的现状和发展[J].声学技术,1999,18(2):95-96.
WU Yun-fa,SUN Nai-hong.The key anti-submarine equipment——the sonobuoy′s status and development[J].Technical Acoustics,1999,18(2):95-96.
[5]迎男.反潜巡逻机今昔[J].现代军事,2000(12):10-12.
YIN Nan.The development of sonobuoy directed patrol aircraft[J].Mordern Military Affair,2000(12):10-12.
[6]李建军.自旋卫星上的一维测向定位技术[J].电子信息对抗,2007,3(2):23-31.
LI Jian-jun.Passive localization technology of one-dimension DF satellite[J].Electronic Information Warfare Technology,2007,3(2):23-31.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
电子产品可靠性与环境试验(2020年2期)2020-12-14 12:14:35
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
水下无人系统学报(2018年5期)2018-11-09 07:40:54
无人机(2017年10期)2017-07-06 03:04:38
声学与电子工程(2017年1期)2017-06-22 11:30:07
大陆桥视野·下(2017年5期)2017-06-19 01:20:38
北京航空航天大学学报(2016年7期)2016-11-16 01:50:54
现代防御技术(2016年1期)2016-06-01 12:13:27