
舰艇编队雷达网探测范围的实时计算方法*
2013-11-23 07:54郑守铎
舰船电子工程 2013年9期
方 良 郑守铎
(中国人民解放军92941部队 葫芦岛 125000)
1 引言
随着远程打击武器,精确制导武器的使用,以及反雷达措施的不断完善,现代雷达正面临日趋严重的威胁[1],给传统的单部雷达系统设防反辐射导弹、隐身目标、超低空目标和综合电子干扰等四大威胁带来了极大困难[2],雷达性能的有效性和生存能力都受到了严峻的挑战,在这种情况下,通过合理的雷达组网,可提高海上编队雷达网自身抗干扰、抗目标低空入侵、抗反辐射导弹和抗隐身目标的能力。如何计算舰艇编队雷达网探测范围,对于实现舰艇编队雷达网多种威力指标的计算,进而为雷达网实际效能评估及部署优化,具有重要意义[3~4]。
文献[5]提出了一种采用逐点计算的方法模拟雷达网平面探测范围,该方法利用Window API函数PtIn-Region,判断一个点是否在雷达网探测范围内[5],但函数Ptlnregion并不能总是可靠地返回正确结果,其原因之一可能是因为库函数的参数均为整形数据,而用户一般采用浮点型[6],文献[4]通过改进计算几何的射线法,提供了一个新的判断函数,该方法需要排除很多特殊情况,实现较为复杂。本文提出了一种舰艇编队雷达网探测范围的实时计算方法,能够精确地得到未受干扰和干扰后雷达网每个方向的探测范围,在雷达网边界提取过程中提出一种更方便的边界提取方法即逐段判断法,并在舰艇编队雷达网有干扰和无干扰条件下对雷达网探测范围进行了仿真,从仿真结果可以看出该方法效率较高且较精确,从而找到一种对舰艇编队雷达网探测能力进行评估的新方法,为下一步雷达网效能评估及优化部署作准备。
2 单部雷达的探测范围
2.1 无干扰条件下警戒雷达对目标的探测距离
无干扰条件下,警戒雷达对目标的探测距离由雷达对目标的最大作用距离及雷达的通视距离所决定,雷达的探测距离计算公式如下[7]

其中,Rmax是雷达对目标的最大作用距离;Rs为通视距离。

式中,Pt为雷达发射功率(W);Gt为雷达天线增益(dB);λ为雷达工作波长(m);σ为目标雷达截面积(m2);K为波尔兹曼常量,取为1.38*10-23瓦*秒/度;T0为绝对温度,取为290K;Δfr为雷达接收机带宽(Hz);Fn为噪声系数;(SN)min为雷达的最小检测信噪比,定义为雷达发现概率为0.5时接收端的信噪比。

式中,ht为目标高度;hr为雷达高度。
2.2 噪声干扰条件下警戒雷达对目标的探测距离
在噪声干扰条件下,单部警戒雷达对目标的最大探测距离为[8]

式中,Pt为雷达发射功率(W);Gt为雷达天线增益(dB);λ为雷达工作波长(m);σ为目标雷达截面积(m2);Nr为雷达的内部噪声;Nj为雷达接收的干扰机噪声;(SN)min为雷达的最小检测信噪比,定义为雷达发现概率为0.5时接收端的信噪比。

式中,K为波尔兹曼常量,取为1.38*10-23瓦*秒/度;T0为绝对温度,取为290K;Δfr为雷达接收机带宽(Hz);Fn为噪声系数;

式中,Pj(i)为第i部干扰机的发射功率(W);Gj(i)为第i部干扰机的天线增益(dB);γj(i)为第i部干扰机干扰信号对雷达天线的极化损失;Rj(i)为第i部干扰机到雷达的距离(m);Δfj(i)为第i部干扰机的带宽(Hz);G′t(θji)为雷达天线主瓣指向目标方向时,在第i部干扰机方向上的增益(dB)。
2.3 坐标转换
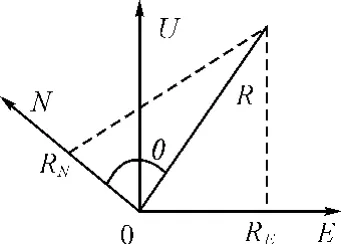
图1 雷达水平探测距离的ENU 坐标系转换图
在得到单部雷达在每个方向上的探测距离后,首先转化为本地切平面笛卡尔坐标,这里使用东北上坐标系(ENU-East-North-Up),如图1所示,E代表正东方向,N代表正北方向,U代表垂直向上方向。
当雷达指向与正北方向的夹角为θ时:

将单部雷达的探测范围在ENU 坐标系下离散成360个点,即每隔一度一个点,由式(7)即可得到单部雷达探测距离边界在360°范围内ENU 坐标系下的坐标值。
在得到该雷达探测范围边界ENU 坐标系下的坐标值后,将该坐标值转换到地心直角坐标系(ECR-earth-centered-rotating)下,得到地心直角坐标系下的坐标值Rx(θ)、Ry(θ)、Rz(θ),两个坐标系具体的转换关系参见文献[9]。
则该雷达在ECR坐标系下各方向的探测范围边界为

式中,ECR(θ).X,ECR(θ).Y,ECR(θ).Z分别为该雷达在与正北方向夹角为θ时,探测范围边界在ECR 坐标系下的坐标值,RECR.X为雷达自身在ECR 坐标系下的x坐标,RECR.Y为雷达自身在ECR 坐标系下的y坐标,RECR.Z为雷达自身在ECR 坐标系下的z坐标。
最后再将该雷达在ECR 坐标系下的探测范围边界的坐标值转化到大地经纬度高度坐标系(LLA-Latitude-Longitude-Altitude)下,得到LLA 坐标系下坐标值Lat(θ),Lon(θ),Alt(θ),ECR 坐标系到LLA 坐标系的转换参见文献[9]。
通过以上坐标转换即可得到每部雷达探测边界在大地经纬度高度坐标系下360°范围内的坐标值。
3 雷达网平面探测范围边界提取
在求得舰艇编队雷达网内各雷达单元的平面探测边界之后,经交叉、重叠构成雷达网的整体平面探测边界。提取出雷达网的平面探测边界,可更加直观地显示雷达网的威力,对于态势标绘有一定的应用价值[10],可为雷达网效能评估及优化部署作准备。各单部雷达探测边界已经得到,关键是怎样判断各单部雷达的探测边界是否是雷达网的探测边界。
3.1 边界提取原理
通过计算判断各单部雷达的探测范围边界上的点是否在其他雷达探测范围之内,如果该点在其他某个雷达的探测范围之内,这个点就不是雷达网探测范围边界的点,如果该点不在其他任何雷达探测范围之内,这个点就是雷达网探测范围边界点。
这里关键要解决的问题是如何判断点是否在一个区域内,这里采用逐段判断法来进行判断。

图2 判断点是否在区域内示意图
如图2所示,多边形A的顶点序列P1,P2,…,Pn(顺时针排列),从点P1(Xlast,Ylast)开始,顺时针旋转逐段判断点P是否在多边形区域内。
利用逐段判断法判断点是否在区域内的算法流程如图3所示。
通过上述步骤,可计算出过点P与区域的横交点数及纵交点数,如果横交点数为奇,则该点在区域内,否则判段纵交点数的奇偶性,如果纵交点数为奇,则该点在区域内,否则该点在区域外。
3.2 雷达网边界点确定
在第2节中,得到了单部雷达探测范围边界360°范围的经纬度坐标,利用这些经纬度坐标和3.1节介绍的边界提取原理,判断出每一部雷达探测范围边界点是否在其他雷达探测范围之内,通过计算得出所有不在其他雷达探测范围内的点,这些点即为雷达网边界点。
4 仿真应用
假设某舰艇编队中有四艘舰艇A、B、C、D和一架预警机E:
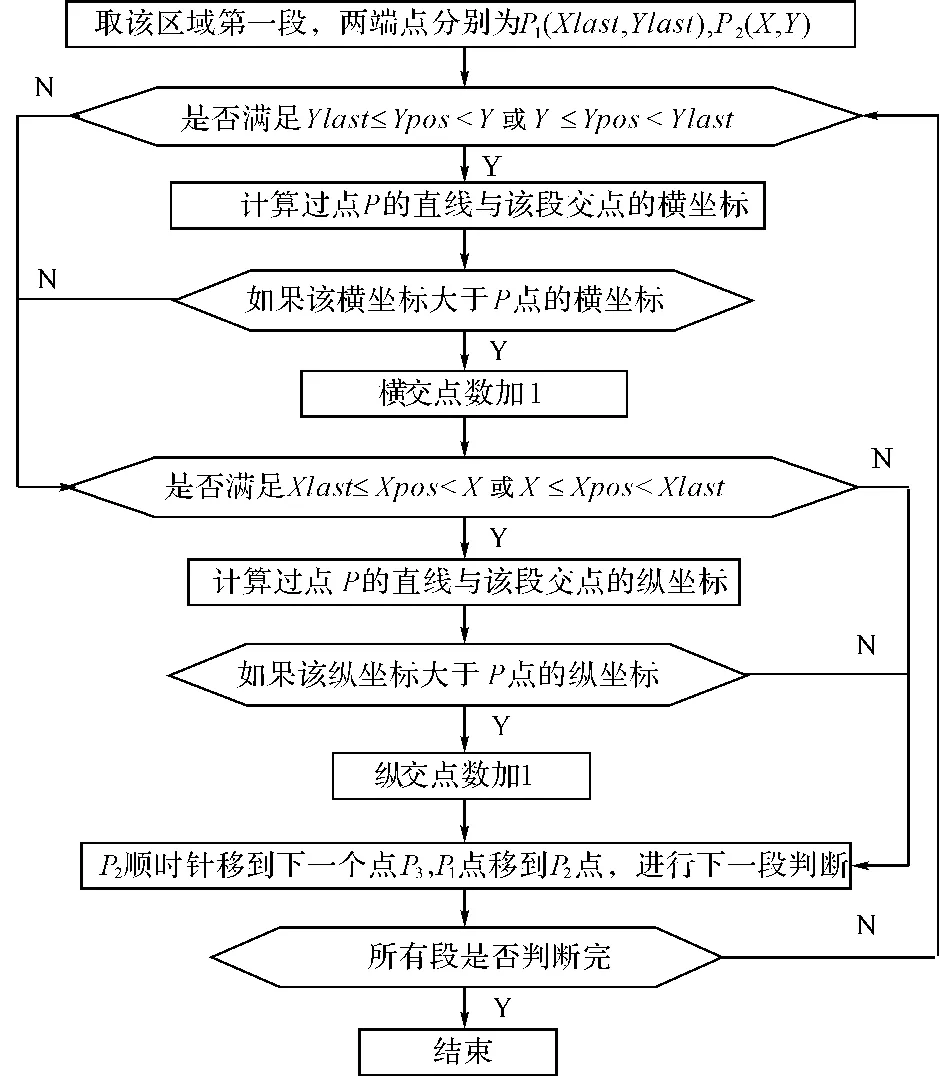
图3 算法流程图
仿真场景1:假设舰艇A为编队指挥舰,该舰艇编队的对海警戒区域为一个140×140 的区域加600×600 的区域,舰艇A对海警戒雷达的探测距离为50km,位于(400,400)处。舰艇B、C、D对海警戒雷达探测距离为60km,舰B位于(440,400),舰C位于(360,400),舰D位于(400,460)。预警机E对海搜索距离为300km,位于(400,780)。图4是舰艇编队雷达网无干扰时对海整体探测范围图,图5是舰艇编队雷达网无干扰时对海探测边界提取图。
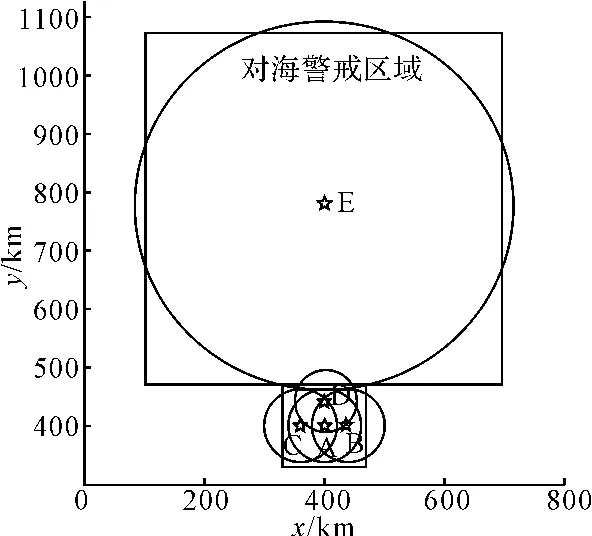
图4 舰艇编队雷达网无干扰时对海整体探测范围图
仿真场景2:在场景1情况下,在距离舰艇编队融合中心A800km 左右,有一敌方噪声压制干扰,在图4编队模式下,根据式(4)求得雷达网威力范围,图6是舰艇编队雷达网干扰时对海整体探测范围图,图7是舰艇编队雷达网干扰时对海探测边界提取图,由图可见雷达网对海警戒范围有较大压缩。
从仿真结果看出,舰艇编队雷达网边界提取完整准确,在Windows系统、CPU 主频3.0G 硬件环境下运行耗时仅需0.04s,可见在仿真效率、精度方面均有较好表现,仿真结果表明了本文所述算法的正确性和有效性。

图5 舰艇编队雷达网无干扰时对海探测边界提取图
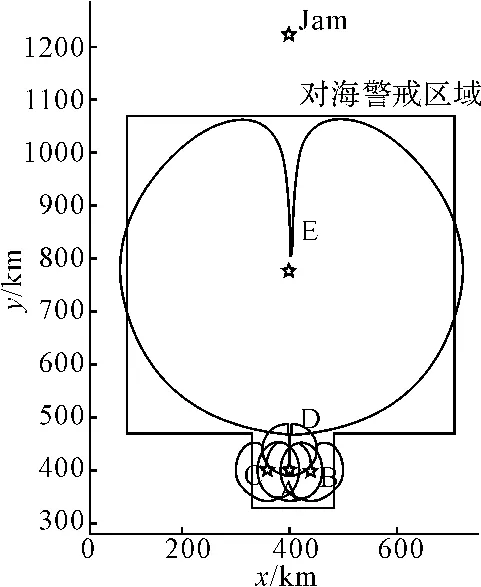
图6 舰艇编队雷达网干扰时对海整体探测范围图
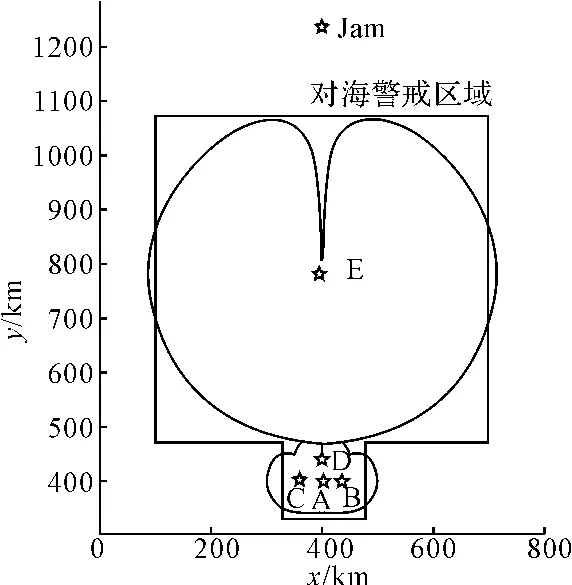
图7 舰艇编队雷达网干扰时对海探测边界提取图
5 结语
本文提出了一种舰艇编队雷达网探测范围的实时计算方法,能够精确地得到未受干扰和干扰后雷达网每个方向的探测范围,在雷达网边界提取过程中提出一种更方便的计算方法即逐段判断法,并在舰艇编队雷达网在有干扰和无干扰条件下对雷达网探测范围进行了仿真,从仿真结果可以看出该方法效率较高且较精确,从而找到一种对舰艇编队雷达网探测能力进行评估的新方法,为下一步雷达网效能评估及优化部署作准备。
该方法不仅适用于海上舰艇编队雷达网的探测范围计算,同样适用用于其他岸基雷达网探测范围的计算。
[1]孙宏刚,姚景顺.海上编队雷达网的优化及抗干扰效能分析[J].现代雷达,2005,27(3):12-14.
[2]刘以安,孟现海,杨华明.粒群算法在雷达优化组网中的应用研究[J].兵工学报,2007,28(5):547-550.
[3]李昌锦,陈永光.电子战环境下组网雷达检测性能分析与仿真[J].火力与指挥控制,2007,32(1):14-17.
[4]Wu Xiaoling,Shu Lei,Yang Jie.Swarm Based Sensor Deployment Optimization in Ad Hoc Sensor Networks[J].ICESS,LNCS 3820,2005:533-541.
[5]王树文.计算机模拟雷达网平面探测范围的一种绘制方法[J].空军雷达学院学报,1999,13(3):51-53.
[6]李海娇.Visual C++库函数PtInRegion 存在的问题及修正[J].华东交通大学学报,2005,22(5):88-91.
[7]Merrill I.Skolnik.Introduction to Radar Systems[M].publishing House of Electronics Industry,2007:5-6.
[8]许大秦,李照顺.警戒雷达被干扰时探测范围的实时计算方法[J].火力与指挥控制,2009,34(6):128-130.
[9]许大琴,李照顺.警戒雷达被干扰时探测范围的实时计算方法[J].火力与指挥控制,2009:128-130.
[10]周启明,王中杰,李侠.雷达网威力仿真中的复杂区域图形处理算法[J].现代防御技术,2008,36(1):87-91.
猜你喜欢
环球时报(2022-12-30)2022-12-30
绿色科技(2022年20期)2022-11-17
凤凰动漫(军事大王)(2022年3期)2022-06-17
铁道通信信号(2020年6期)2020-09-21
农业与技术(2018年18期)2018-12-18
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年12期)2017-04-23
弹箭与制导学报(2015年1期)2015-03-11
军事体育学报(2014年3期)2014-02-27
物理教学探讨(2009年7期)2009-06-08
