
电动汽车用外转子开关磁阻电机设计与控制系统仿真
2013-11-21 08:00:26殷天明
电机与控制应用 2013年10期
韩 帅,王 艳,殷天明
(1.北京交通大学电气工程学院,北京 100044;2.北京联鑫动力科技有限公司,北京 100096)
0 引言
开关磁阻电机(Switched Reluctance Motor,SRM)因为其结构简单、成本低、较高的调速范围、控制灵活且效率高等优点[1],且有一定的再生制动能力,在电动汽车领域具有更广阔的应用前景。外转子开关磁阻电动轮系统作为轮毂电机系统的一种,可以直接驱动汽车的运行,省去齿轮箱、传动轴等机械结构,提高了电动汽车的效率及可靠性。直接控制电机的运行状况即可控制汽车的运行状况,使得电动汽车的操纵简单。
电动汽车用SRM要求有较小的转矩脉动及一定的再生制动能力,以增加汽车的续航里程。电压及电流斩波控制及角度控制[2]是SRM最常用的控制策略。本文采用有限元软件Ansoft对30 kW的12/8极SRM进行了不同角度、不同电流下稳态磁场的仿真分析,得到的磁链、转矩数据作为MATLAB仿真下的电机数据。其次利用MATLAB/Simulink建立SRM非线性控制模型,在电流斩波,电压斩波及角度控制的基础上,引入模糊电流补偿控制器,对SRM电动状态及再生制动状态进行了仿真。
1 SRM非线性模型
1.1 SRM的数学模型表达式
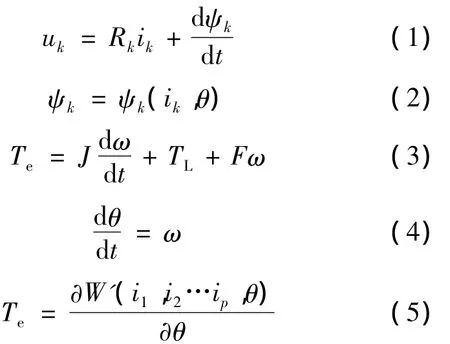
式中:uk——第 k(k=1,2…p)相绕组电压;
Rk——第k相绕组电阻;
ik——第k相绕组电流;
ψk——第k相绕组磁链;
重型血友病患者首次关节出血一般发生在2岁左右,关节出血的发生率随着年龄增长而逐年提高。反复的关节出血易集中在1~2个关节,血友病常累及膝、踝、肘及腕关节,以膝关节最常见,约占49.3%,且关节出血多见于血友病A[11]。
Te——电磁转矩;
J——转动惯量;
F——阻尼系数;
TL——负载转矩;
W'——绕组的磁共能[3],
为了得到式(2)的磁链与式(5)的转矩的数值关系,本文采用有限元软件Ansoft对SRM进行二维稳态磁场分析,可以较为精确地得到磁链和转矩随角度和电流变化的数据。
1.2 Ansoft电机模型
本文采用的12/8极外转子SRM,参数如表1所示。
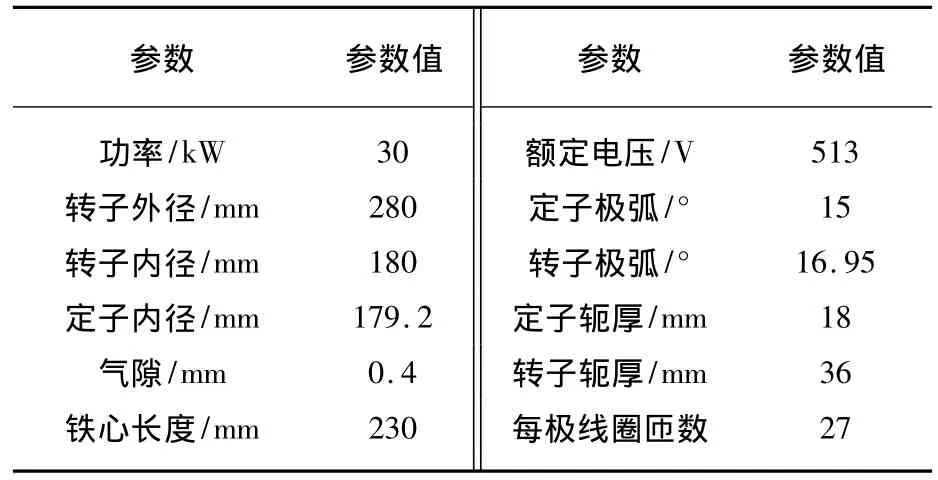
表1 SRM参数
基于Ansoft建立的电机模型[4]如图1所示。
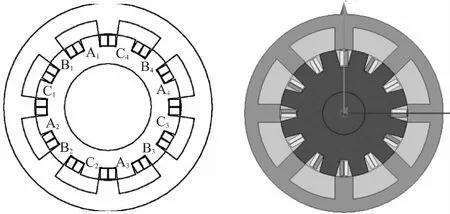
图1 Ansoft电机模型
1.3 Ansoft二维稳态磁场求解
在一个转子位置角周期(0~45°),电流变化为0,10,20…120 A下的磁链曲线图和转矩曲线图[5]分别如图 2、图 3 所示。
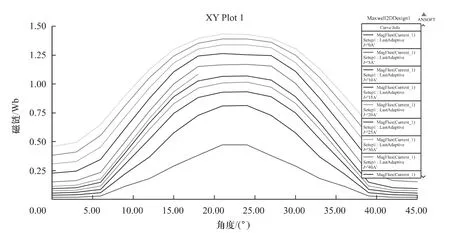
图2 0~120 A磁链角度曲线图

图3 0~120 A转矩角度曲线图
2 SRM系统仿真模型
2.1 单相SRM仿真模型
单相SRM仿真模型主要由电流斩波,功率变换,电流、转矩查表,模糊电流补偿控制器构成。
(1)电流,转矩查表模块。
利用前文30 kW SRM得到的稳态磁场数据,采用数值分析三次多项式插值法,利用MATLAB工具箱将图2反演为i=f(ψ,θ)的数据,结果如图4所示。采用MATLAB二维查表模块。当输入给定的磁链值和角度时,电流模块利用二次插值的算法计算得到最接近的电流值,由得到的电流值与角度值输入转矩查表模块,得到最接近的转矩值。
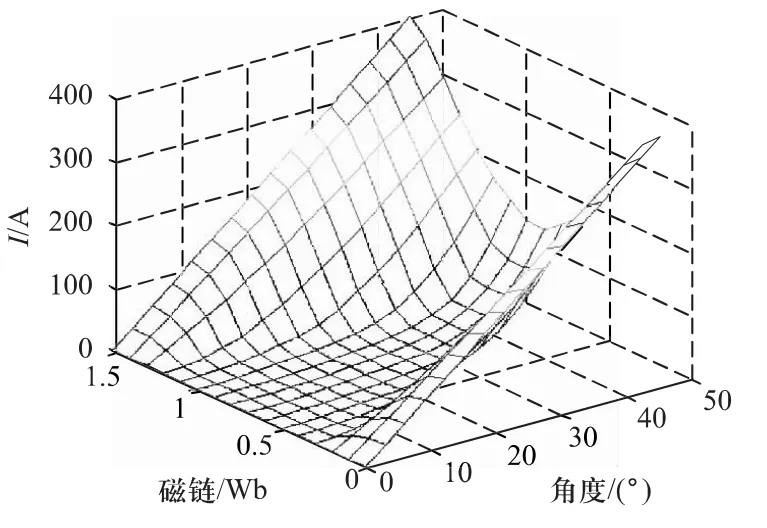
图4 电流反演图
(2)电流斩波模块。
在一个转子周期内,当电流大于斩波上限值ih时,关断开关管,当电流小于斩波下限值il时,开通开关管。管子导通时施加正的电源电压,管子关断时施加负的电源电压,使电流迅速下降为零。
(3)功率变换模块。
电动状态下:当角速度0<w<100时,开通角度 θon=2.5°,关断角度 θoff=17.5°,导通电压为513 V。当 w≥100 时,θon=42°,θoff=16°。
制动状态下:当角速度0<w<100时,开通角度 θon=22°,关断角度 θoff=31°。w≥100 时,θon=18°,θoff=31°。当 θ> θoff时,绕组施加负的电压513 V,使电流在下一周期开始前下降为零。
(4)模糊电流补偿模块。
为减小转矩脉动,引入模糊电流补偿模块[7]。根据图3转矩特性曲线,在角度偏小和偏大区域,转矩的回落幅度最大,在此区域补偿较大的电流,以减小转矩的回落。在其他区域补偿较小的电流或者不进行补偿。
模糊控制以电流值和角度值作为输入,补偿电流为输出[8]。电流值和角度值各分为七个语言值。分别为 NB、NM、NS、Z、PS、PM 和 PB。其补偿电流隶属函数如图5所示,电流补偿的模糊规则表见图6。
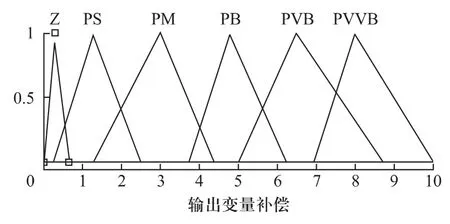
图5 补偿电流隶属函数
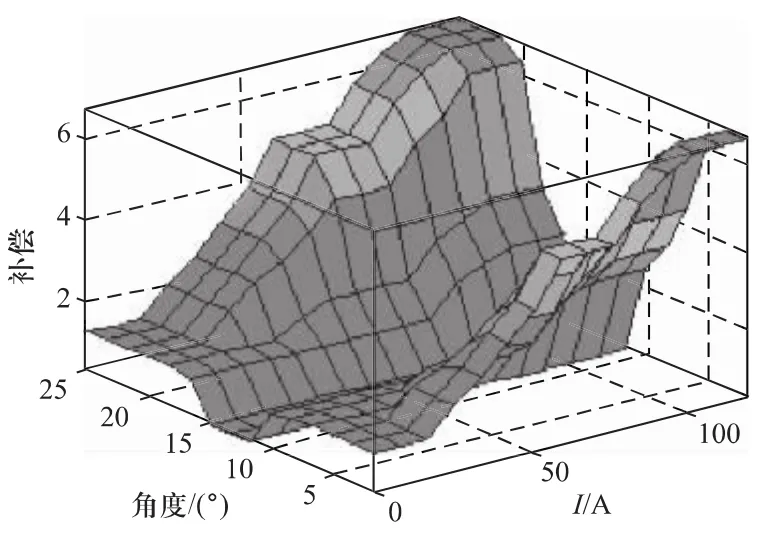
图6 模糊规则表
2.2 三相SRM仿真模型
采用的三相双闭环控制系统仿真模型,其三相模型各差15°。每相模型中,采用 MATLAB Function函数将采集到的电机位置信号(经角速度积分得到)转化为0~45°的角度值。转速环采用 PID 控制器,ki=10,kp=20,kd=0.05,电流环采用PI调节器,kp=15,ki=5。
当电机起动时,为限制起动电流,采用带模糊电流补偿的电流斩波控制,电流斩波值设置为50 A。当角速度w≥50 rad/s时,采用双闭环控制,外环速度环的输出作为内环电流环的给定,电流环的输出值送入PWM模块,与参考波形(三角波)相比较,输出占空比可调节的PWM波。
当电机制动时,首先将外环速度给定变为负值,同理,速度反馈经反相器也变为负值,这是因为制动状态下,导通角度变化,电机输出转矩为负值,为了保证闭环系统为负反馈,作此改变。倘若未改变给定与反馈方向,系统将工作在正反馈状态下。
制动状态下,当 w≥50 rad/s时,采用 PWM控制,当w<50 rad/s时,采用电流斩波的双闭环控制。此时速度环的输出经PID调节作为电流斩波的给定值。
2.3 仿真结果
仿真结果如图7~图12所示。电动状态下速度给定值设定为w=200 rad/s,制动状态下速度给定值设定为w=60 rad/s。
由图7可知,电机可运行在电动状态下和再生制动状态下。由图11和图12相比较可知,传统控制策略下的转矩最小值为50 N·m,带模糊补偿控制的转矩最小值为80 N·m,其在一定程度上抑制了转矩脉动。

图7 转速波形
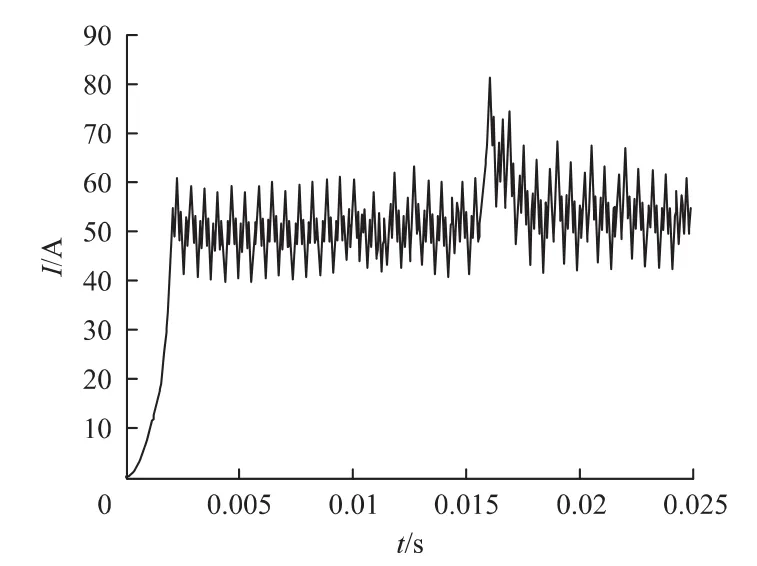
图8 斩波状态下电流波形
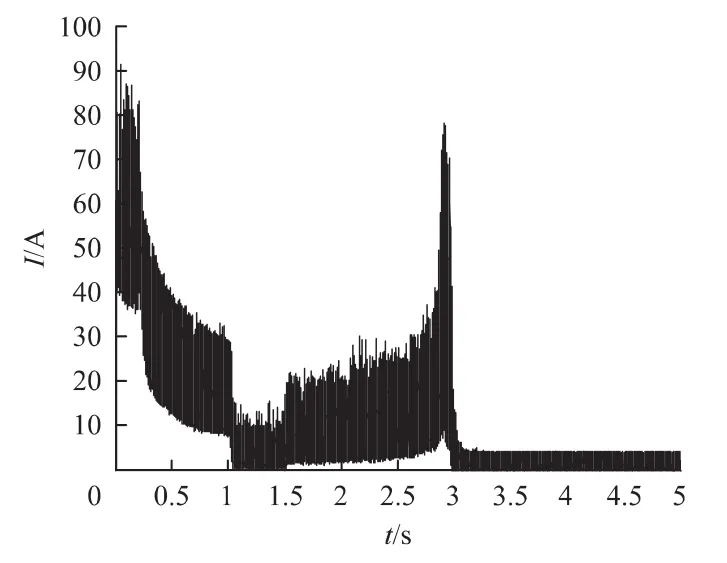
图9 三相电流波形
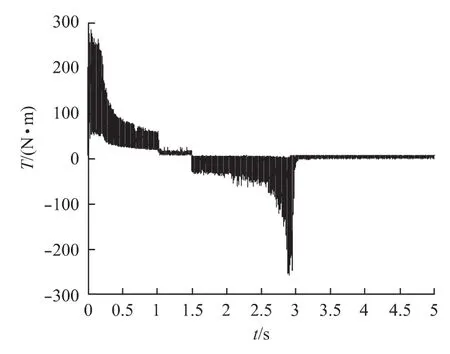
图10 三相转矩波形
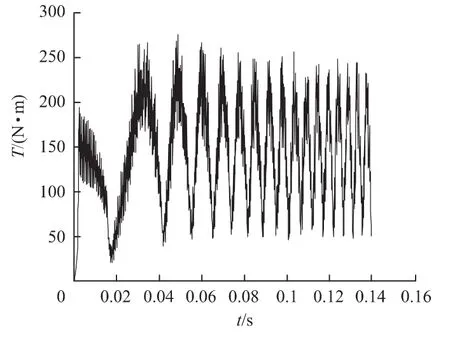
图11 传统控制下起动转矩
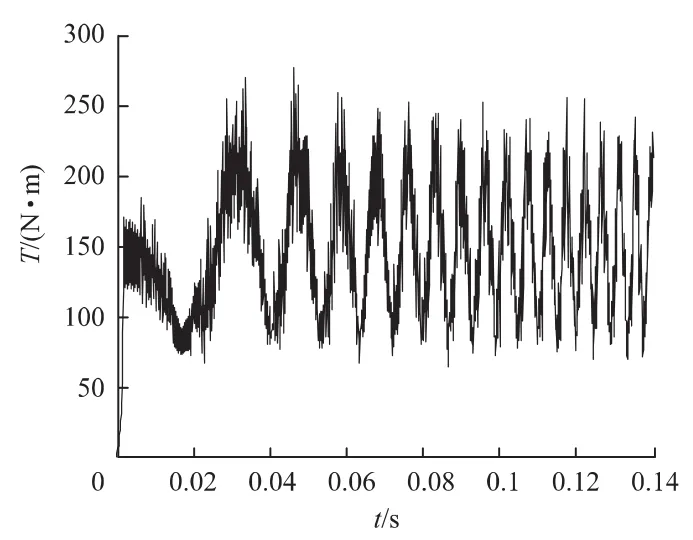
图12 带模糊电流补偿下的起动转矩
3 结语
本文针对30 kW电动汽车用外转子SRM,采用有限元分析进行了电机本体设计,较为精确地获得了SRM的静态特性。利用MATLAB/Simulink对SRM进行了系统建模和调速仿真。电动汽车用SRM要求具有较小的转矩脉动和再生制动能力。仿真结果表明本文所建立的模型和控制策略实现了再生制动的要求,且有较小的转矩脉动。结果表明SRM控制系统可以很好地应用于电动汽车领域。
[1]王宏华.开关磁阻电机调速系统控制技术[M].北京:机械工业出版社,1995.
[2]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[3]吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
[4]闫大伟.外转子开关磁阻电动机的设计及其有限元分析[D].广州:华南理工大学,2004.
[5]汤蕴璆,梁艳萍.电机电磁场的分析与计算[M].北京:机械工业出版社,2010.
[6]黄宝磊,商高高,童成前.SRM应用于混合动力汽车再生制动系统的可行性分析[J].机械设计与制造,2012,1(1):46-48.
[7]SOARES F,COSTA P J.Simulation of switched reluctance motor based on MATLAB/simulink environment[J].Aerospace and Electronic Systems,2001,37(3):989-1009.
[8]HUSAIN,EHSANIM.Torque ripple in minimization in switched reluctance motor drives by PWM current control[J].IEEE Transactions on Power Electronics,1996,11(1):83-88.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46
四川冶金(2018年1期)2018-09-25 02:39:26
电子设计工程(2017年20期)2017-02-10 03:40:05
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电机与控制应用(2015年3期)2015-03-01 03:49:59
电机与控制应用(2015年1期)2015-03-01 03:49:08
电测与仪表(2014年23期)2014-04-04 12:08:30
