舰船卫星探测实验中利用AIS获取现场同步数据的可行性分析
2013-11-12 07:28孟俊敏
海岸工程 2013年4期
张 婷, 张 杰, 张 晰, 孟俊敏
(国家海洋局 第一海洋研究所,山东 青岛 266061)
舰船监视监测是世界各沿海国家的传统任务。舰船监视在海上交通运输、渔业管理、打击偷渡走私犯罪、非法移民等航运管制,及发展国防事业、保卫领海等军事领域均起着重要的作用。当前我国海洋维权形势非常严峻,周边部分国家的非法船舶不断到我国管辖海域进行测量,如美国不顾我国政府反对,不断派其军事测量船到我管辖海域进行频繁的水文、地质等资料的收集,并进行水下监视、监听设备布设等战场准备活动,无视我国主权,极大地侵害了我国的海洋权益,对我国海上安全构成了威胁。因此,急需加强对我国管辖海域内舰船目标的监视监测。
传统的海洋监测主要是通过飞机和船舶开展监测,其中船舶监测存在费用高、反应慢、活动区域受限等问题;飞机虽然具有机动灵活的优点,但数量较少,航时有限,难以实现恶劣环境条件下的大面积实时监测。星载SAR具有空间分辨率高、覆盖面积大、全天时、全天候、节省投资等优点,能够实现舰船目标的精确定位,是海上舰船目标监测的重要手段。国内外学者对此也十分关注,先后提出了一系列有针对性的SAR图像舰船检测算法[1-2],但算法的准确性需要有现场实测数据来验证。为了验证算法的准确性,需开展与卫星同步的舰船目标探测实验,用获取的现场同步数据来检验SAR舰船检测算法的性能。
在开展的多手段联合探测舰船目标实验中,发现如何获得现场实测数据来验证SAR探测结果的准确性,是实验最重要的环节之一。若租用工作船,在卫星过境前后时间内,于港口锚地搜寻舰船,利用携带的DGPS接收机来获取舰船的地理位置,并记录舰船的有关信息,这样不仅工作量大,而且数据时效性差,更重要的是无法采集运动船舶的信息。所以,可利用AIS信息开展多手段联合探测舰船目标实验。
AIS(船舶自动识别系统)是一种船舶导航设备,是工作在VHF海上频段的岸基和船载广播式自动识别应答器系统,《SOLAS公约》规定所有≥300 t的国际航行船舶和不论大小的客轮都应装配AIS[3]。AIS采用船舶全球唯一编码MMSI码作为识别手段,按照固定的时间段发送报文并接收周围船舶AIS发来的报文。这些报文的信息包括MMSI码、船名、呼号、IMO 号、船舶类型、吃水深度、船舶大小、GPS 天线方位、定位装置等船舶资料和航行状态、航速、航向、目的港及货物种类等动态数据[3],因此,利用AIS提供的数据,可以得到所测范围内船舶的数量和位置信息,能够作为实测数据为SAR检测算法提供验证依据。
20世纪90年代,星载AIS出现,星载AIS在一颗或者多颗低轨道的卫星(卫星轨道高度600~1000 km)上搭载AIS收发机来接收和解码AIS报文,并将信息转发给相应的地球站。星载AIS属于非实时通信系统,系统对船舶位置的覆盖不是一直持续的。在卫星覆盖区内,用户可以实时地进行通信并下载数据。星载AIS作为跟踪系统具有以下特点:1)对用户限制少:星载AIS不是点对点系统,用户不需要支付任何电信费用。2)覆盖面广:系统可以达到全球覆盖,包括极地区域,可用于船舶的全球跟踪,便于船队管理[4]。
通过现场试验收集的AIS数据与SAR图像进行匹配,发现直接利用AIS匹配运动目标会存在一定的偏差,这个偏差是由多普勒频移和时间误差造成的。分析多普勒频移和时间误差造成的距离偏差,对匹配结果进行修正,使AIS与SAR的探测结果更好的实现了匹配。
1 数据偏差分析
图1为2010-11-05T06∶51渤海海峡的Radarsat-2影像,极化方式为VV极化,分辨率为8 m。图2为SAR与AIS联合探测舰船实验的匹配结果图,图中的亮点为SAR检测到的舰船目标,绿色点为AIS探测到的舰船目标。通过时空匹配的SAR图像和AIS数据比较,可以发现2种手段探测到的静止的舰船目标可以精确的匹配(图2(a)),但是运动的舰船目标存在一定的误差(图2(b)),当多艘运动舰船目标距离较近时,往往无法分辨AIS探测到的目标与SAR图像上的哪艘舰船匹配,因此这个偏差必须经过校正以后才能使用。
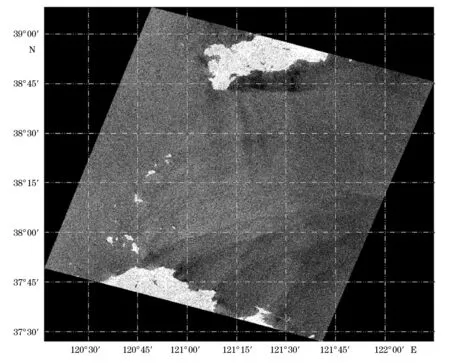
图1 2010-11-05T06∶51渤海海峡Radarsat-2影像Fig.1 Radarsat-2 images of the Bohai Strait obtained at 2010-11-05T06∶51

图2 Radarsat-2影像与AIS数据匹配结果Fig.2 The results matched between the Radarsat-2 images and the AIS data
卫星飞行路径在地面上的投影(地面轨迹)方向称为方位向,而与其垂直的方向称为距离向[5]。舰船运动引起的偏差可以分解为距离向偏差和方位向偏差。距离向偏差是由AIS时间误差引起的。在联合探测实验中,AIS探测的时间与SAR的探测时间并不是同一个时间源,且AIS并不是实时发送信号的,它按照固定的时间段(10 s,20 s或更长时间)来发送信号,当船的运动速度很快时,10 s的时间误差可以引起很大的距离偏差。假设船的速度为u,AIS时间误差为t,θ为航向与距离向的夹角,则由时间误差引起的距离向和方位向的偏移分别为:utcosθ和utsinθ。
方位向的偏差主要是由多普勒频移造成的。当发射源与接收体之间存在相对运动时,接收体接收的发射源发射信息的频率与发射源发射信息频率不相同,这种现象称为多普勒效应,接收频率与发射频率之差称为多普勒频移[6]。用SAR图像进行舰船检测时,当舰船目标在距离向存在速度时,多普勒频移会造成目标在方位向上的偏移。
方位偏移(D)表示为:
(1)
式中,R为卫星到目标的距离;V为卫星速度;u为舰船的速度;θ为航向与距离向的夹角[7-8]。
则AIS探测到的舰船位置与SAR探测到的舰船位置的偏差L:
(2)
对于一景特定的SAR图像来说,R、V为固定值,影响L的参数为u、t、θ。为了便于分析各参数对L的影响情况,将公式写为:
(3)
(4)
由式(3)可知,偏移量L与舰船的速度u呈线性关系,L随u的增加而增加,如图3。

图3 L随u的变化曲线Fig.3 The changes of L with u

图4 L随θ的变化曲线Fig.4 The changes of L with θ

由此可以看出,当运动舰船目标的速度一定时,舰船的航向是影响匹配结果偏差的主要因素,不同的航向造成的距离偏差可达几百米。
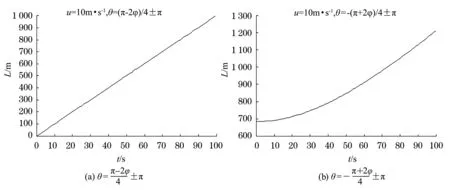
图5 L随t的变化曲线Fig.5 The changes of L with t

所以,对于同一运动的舰船目标,只要它的航速和航向不变,造成偏移的主要因素就是时间误差。因此在联合探测实验中,应尽可能使AIS的时间与卫星时间精确一致,时间误差在30 s内为佳。
2 偏差修正
知道了L随u、t、θ的变化特性后,在联合探测实验后期处理数据时,可以根据u、t、θ将L计算出来并对数据加以修正,使AIS数据与SAR图像更好的匹配。以图2(b)中选中的舰船目标为例,该时刻AIS探测到的该船信息:船号为249697000;速度为14.6 n mile/h ,航向为289°;船长190 m,宽32 m(图6)。图中黄色圆圈为AIS探测到的该船位置。

图6 Radarsat-2 2010-11-05T06∶51渤海海峡Fig.6 A Radarsat-2 image of the Bohai Sea obtained at 2010-11-05T06∶51
根据这景Radarsat-2影像的斜距时间计算出卫星到舰船目标的距离R≈1 006 km,卫星速度V≈7 547.5 m/s,由此可根据式(2)计算出由多普勒频移造成的方位向偏移为D≈969.3 m。由图6可知目标与SAR图像上的1号舰船目标位置最为接近,将1号舰船目标按照计算出的多普勒偏移在方位向修正后,舰船目标(方框中的亮点)在AIS探测到的该舰船的航向上;从SAR图像中可以测得距离向的偏差约为1 030 m,由此计算出当时的AIS时间误差为142 s。时间误差大的原因除了AIS的信息发送时间有一定的时间间隔外,主要原因是AIS与SAR不是同一个时间源,AIS信息中保存的时间是AIS终端系统的时间,这个时间与SAR的系统时间可能存在一定的误差。根据船速计算出AIS时间误差造成的方位向偏差为90.35 m,则该舰船目标在方位向的总偏差为1 059.65 m。AIS探测到的舰船目标的航向与SAR探测到的舰船目标的航向并不完全一致,有一定的夹角(图6)。这是因为AIS探测到的航向是舰船的设定航向,但舰船在实际航行过程中由于受到海流及风的影响会在某一段时间略微偏离设定航向,而SAR探测到的航向为该时刻舰船目标的真实航向,两个航向之间会存在一定的夹角,这与该时刻的海流、风速等海况条件有关。
因此经偏差修正后可以将该舰船目标与SAR图像中的探测到的1号舰船目标精确匹配,而不会匹配到该点附近SAR探测到的其他舰船目标上。从而实现舰船目标的准确定位。
3 结 论
通过开展SAR与AIS联合探测舰船目标实验,发现运动舰船目标的匹配结果存在一定的偏差。经分析,这个偏差与舰船目标的航速、航向及AIS与SAR的探测时间误差有关,主要结论如下:
1)距离偏差L与船速u呈线性关系变化,L随u的增加线性增加。

由此可见,AIS获取现场同步数据的可靠性与船的航速、航向及AIS的时间误差有关。实验时,应使AIS终端的系统时间与SAR卫星时间尽可能的精确匹配;实验后期处理数据时,可以根据船的航速、航向和AIS的时间误差这3个参数将距离误差计算出来并加以修正,使AIS与SAR的探测结果更好的匹配。
致谢:感谢钱文振、许乐达接收AIS数据。
参考文献:
[1] 张晰.星载SAR舰船目标探测实验研究[D]. 青岛: 中国海洋大学, 2008.
[2] 种劲松.合成孔径雷达图像舰船目标检测算法与应用研究[D]. 北京:中国科学院电子学研究所,2002.
[3] 余锦超. 南海海区AIS数据应用[J]. 航海技术, 2009,(1):39-42.
[4] STEPHAN B, SUSANNE L,THOMAS F,et al. Ship surveillance with terraSAR-X[J]. IEEE Transactions on Geoscience and Remote Sensing, 49(3):1092-1103.
[5] 丁鹭飞,耿富录.雷达原理(第三版)[M].西安:西安电子科技大学出版社,2002:333-354.
[6] 张选东,徐继国.基于方位和多普勒频移的目标机动检测方法研究[J]. 指挥控制与仿真,2011,33(2):81-83.
[7] 毛引芳.合成孔径雷达中多普勒频移误差的光学补偿[J]. 电子科学学刊, 1983,l5(2):69-76.
[8] RANEY R K. Doppler properties of radars in circular orbits[J]. International Journal of Remote Sensing,1986,7(9):1153-1162.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
幼儿园(2021年12期)2021-11-06
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船科学技术(2021年12期)2021-03-29
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2017年24期)2017-02-02
中国修辞(2016年0期)2016-03-20
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年2期)2016-02-06