
电子罗盘在水下拖体的应用
2013-11-10 06:18:30郭小俊谈黎洲
上海船舶运输科学研究所学报 2013年1期
郭小俊, 谈黎洲
(上海船舶运输科学研究所 民船产品分所,上海200135)
0 引 言
电子罗盘作为一种测量传感器,能够实时提供运载体的航向、姿态信息及所处位置的磁场强度,并具备精度高、体积小、抗干扰能力强以及环境适应性好等特点,大量地应用于航海、航天、自动控制、交通车辆、医疗仪器等领域。
随着海洋探测和科学研究的发展,各种水下探测设备的应用也越来越广泛,其中包括很多声纳拖曳系统,如剖面仪、侧扫声纳等。拖曳系统利用电子罗盘监测水下拖体在拖曳过程中的姿态,对保障系统设备的安全性及整个系统的测量至关重要。
1 电子罗盘的特性
三维电子罗盘是根据磁场传感器和倾角传感器的输出,通过微控制单元(Micr o Control Unit,MCU)实时解析出航向、纵摇角、横摇角和磁场信息等参数。其组成框图见图1。
PNI公司的TCM3三维电子罗盘[1]使用的是三轴磁通门和加速度计,可以针对磁场源和三维物质中的磁场失真进行校准,在纬度到达85°的时候能够提供高精度的航向姿态信息,主要参数指标见表1。此外,TCM3还具有体积小(3.5 c m×4.3 c m×1.3 c m)、耗能低(工作电流<20 mA)、重量轻(<7 g)的突出优势,因此经常应用于如高性能的水下机器人、声纳目标定位系统等设备当中。
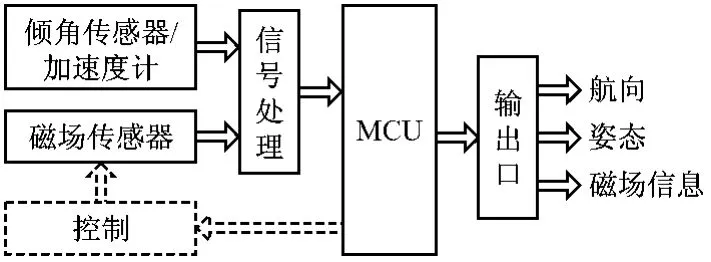
图1 三维电子罗盘组成框图
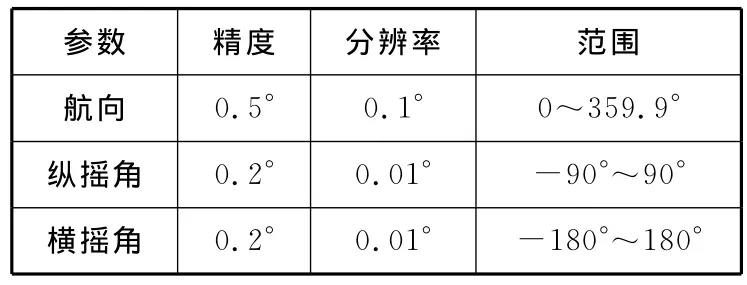
表1 TCM3主要技术参数
TCM3可以设定数据刷新率,最大刷新率为20 Hz,通过RS-232接口输出,使用的是特有的二进制通信协议。TCM3提供了灵活的指令集。用户可以根据需求对参数进行编程设置。通信传输层数据格式见图2。
“字节数”是包含其本身和循环冗余校验码(Cyclic Redundancy Check,CRC)校验位在内的整个信息包的字节总
数,CRC校验算法采用的是CRC-16-CCITT多项式规范,校验算法的有效数据对象是从字节数开始到数据包最后1个字节为止。“数据包”是由指令标识符“帧ID”和该帧所包含的有效数据构成。

图2 RS232通信数据格式
2 在水下拖体中的应用
2.1 水下拖体

图3 剖面仪系统主要组成
水下拖曳系统是一种水下探测装置,一般由水下拖体、拖曳缆和收放装置组成。收放装置控制拖曳缆的收放长度,拖体则作为搭载核心声学探测装置的平台,用于进行海底地形地貌、浅层地质和水下目标的扫描探测。这些系统往往需要获得探测目标的精准方位信息,三维浅地层剖面仪作为一种海底地层探测声纳系统也是如此,系统主要组成见图3。
2.2 拖体姿态实时监测和控制[2-4]
2.2.1 拖体姿态监测控制
TCM3三维电子罗盘安装在拖体内部,为实时监测其在水下的姿态提供可靠的数据信息。拖体姿态监测控制可分为3个过程:
(1)姿态信息的读取,由显控机向TCM3传达采集指令,并接收TCM3反馈的姿态数据;
(2)根据实时监测的姿态数据调整拖曳缆长度和航速舵角,使拖体姿态满足使用要求;
(3)测量数据的修正,由显控机根据实时姿态数据对测量数据进行修正。
2.2.2 拖体姿态信息的读取
TCM3安装方式选择Z磁轴向上的标准式安装,参数输出选择航向、俯仰角及横滚角,故俯仰角定义为拖体纵轴相对于水平面的倾斜角,横滚角定义为拖体横轴对于水平面的旋转倾角。TCM3的默认航向角为磁方位角,通过配置磁偏角可直接测出真北方位角。
图4为姿态数据的读取流程:显控机始化工作之后,向TCM3发送请求数据命令并接收其返回的数据包。计算数据包的字节数并与传输过来的字节数作比较,判断接收数据是否有丢失。正确的情况下,再对数据包进行CRC16校验,提取数据包中的航向、俯仰和横滚信息。
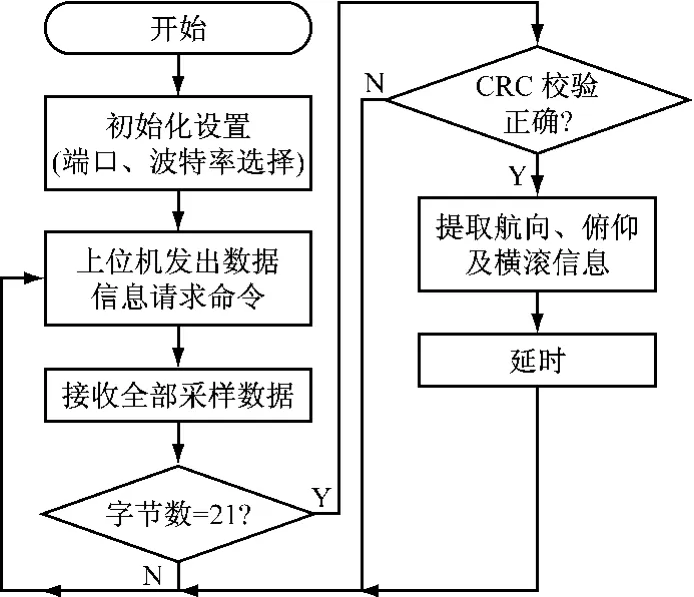
图4 TCM3数据读取流程
2.2.3 拖体姿态的控制
拖体主要由铝合金主构架、浮力材、尾翼、探测传感器和信号收发处理装置构成,在水中的基本配比成中性,浮力与重力持衡,水平漂浮在水表层之下。拖体结构设计的流线性、重心分布及吊放拖曳点的位置等可能影响姿态平衡的因素均已确定,且自身不含可变机械单元,故对其姿态的调整主要是通过改变电动绞车收放缆的长度和拖曳船只的航速、转角。通过确定几者和拖体姿态的关系,在工作中取1个适当值,进而调整拖体的姿态。
2.3 姿态软件工作界面及流程
图5是基于VC的拖体姿态监测界面。开始工作之前,先进行与TCM3的通信设置,主要是串口端口选择和波特率设置,数据传输默认1位起始位、8位数据位,无奇偶校验位和l位停止位。姿态数据显示有两种方式:数值输出和拖体姿态图形显示。
工作流程如图4所示,初始化工作通过发送k Set Config指令对TCM3数据输出波特率进行设置,然后再向其传送k Set DataComponent指令,设定罗盘输出参数的顺序为 Heading(5)、Pitch(24)和Roll(24),对应的数据格式是。发送k Get Data指令并从接收到的正确的姿态数据包里,解析出拖体当前的姿态数据,具体解析流程见图6。对姿态信息的采样,还可以通过传送k Start Inter val Mod指令将TCM3设置成自动数据输出的格式,TCM3将按照k Set Acq Params中设定的采样时间间隔输出数据。
由于TCM3数据的格式是32位单浮点数,存储格式Big Endian,格式为:,由1位二进制符号标识位、8位二进制指数位和23位尾数位构成。实际参数值计算公式为V=(-1)3×2(指数-127)×1.尾数。因此在解析出参数之后,还需按此公式进行数据处理。最后,根据获得的数据,将拖体当前在水下的姿态实时的显示在工作界面上,便于系统作业人员对拖体姿态进行直观观察。CRC16函数代码为:


2.4 结果分析
图7是三维浅地层剖面仪系统在实际湖试应用当中拖体的横摇与纵摇角度部分采样值。从图7中可以看出,TCM3能够以高于0.5°的精度,实时监测出拖体在水下的俯仰角和横滚角,能够满足系统的需求。

图7 拖体姿态测量值
3 结 语
通过TCM3电子罗盘在浅地层剖面仪拖体中的应用,实现了对TCM3的控制编程,以及对航向、俯仰、横滚等数据的读取,有效地检测拖体在水下的姿态。同时,电子罗盘亦具备体积小、重量轻、功耗低等特点,故在其水下拖曳系统中具有较高的实用性和较广的应用前景。
[1] PNI Sensor Cor poration.Binary Protocal-RS232 Interface[EB/OL].Califor nia:PNI Sensor Cor poration,2005[2009-03-09].http://www.pnicor p.co m/system/files/TCM3—TCM5-User-Manual 2012.pdf.
[2] 李彦波.电驱动水下滑翔器姿态调整系统研究[D].天津:天津大学机械工程学院,2007.
[3] 伟利国,张小超,胡小安.TCM3电子罗盘的特性与应用[J].传感器与微系统,2009,28(7):15-17.
[4] 刘晓东,张方生,朱维庆,等.深水声学拖曳系统[J].海洋测绘,2005,25(6):37-44.
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
网络安全和信息化(2018年4期)2018-11-09 12:01:54
作文·初中版(2017年2期)2017-03-06 21:52:54
电子制作(2017年24期)2017-02-02 07:14:16
新闻传播(2015年9期)2015-07-18 11:04:12
发明与创新(2015年25期)2015-02-27 10:39:24
法大研究生(2015年2期)2015-02-27 10:13:55
中国新通信(2014年11期)2014-09-11 19:27:52
深圳信息职业技术学院学报(2013年3期)2013-08-22 11:42:30
