
临近空间变体飞艇技术研究
2013-10-27 01:48肖益军
西安航空学院学报 2013年5期
肖益军
(中国电子科技集团公司 第三十八研究所,安徽 合肥 230031)
1 引言
临近空间飞艇具备区域持久驻空能力,升空高度高,覆盖半径大,探测范围广,可作为各种通讯、监测、雷达设备的搭载平台,在某一固定空间长期驻留执行对地观测、通讯中继、电子对抗等任务,在军事和民用领域具有非常重要的作用。近年来,随着材料技术,能源技术,通信技术,计算机技术等的发展,包括对流层飞艇、系留气球等浮空器技术得以迅猛发展。但现代意义的临近空间飞艇仍处于关键技术探索、攻关阶段,到目前为止,世界范围内还没有研制出可长期驻空、实用化的临近空间飞艇。
2 国外临近空间飞艇发展现状
由于临近空间的水汽、悬浮固态颗粒和杂质极少,气象条件稳定,飞艇飞行高度高、视距范围大等特点,美国、日本、欧洲等工业发达国家将发展临近空间飞艇作为抢占临近空间制高点的战略目标,予以高度重视。美国是临近空间飞艇研制最早、经费投入和项目最多的国家,最具代表性的有高空飞艇(HAA)、高 空 哨 兵(HiSentinel)、传 感 器 飞 艇(ISIS)、平流层卫星(Stratellite)和“攀登者(Ascen-der),涵盖软式、硬式、异形(V型)飞艇等多种形式。HAA又被称作平流层平台系统,由美国导弹防御局和洛克希德·马丁公司联合开发研制,其主要目标是开发搭载大型多任务负载长时间(数月)在高空驻留的无人LTA平台,将用作导弹监视,如图1所示。

图1 美国洛·马公司高空飞艇(HAA)概念设计
高空哨兵HiSentinel是CHHAPP项目计划的一部分,目的是开发低成本的通信、情报侦察和监视的小载重、无人长航时的临近空间飞艇。飞艇采用类似高空气球的放飞方法,放飞时艇体充部分氦气,处于零压状态,随着高度上升逐步膨胀成形,任务设备与艇体分离后依靠降落伞回收。高空哨兵HiSentinel曾携带了大约27千克的设备,在22千米高度飞行了5个小时(见图2)。

图2 HiSentinel临近空间飞艇
ISIS项目的目标是研制一种基于临近空间飞艇的自主无人探测器。该无人探测器集成于飞艇的结构中,几乎与飞艇一样大,可使用数年时间,用于监视和跟踪空中和地面目标,具有跟踪远距离的巡航导弹和地面敌方作战人员的能力(见图3)。
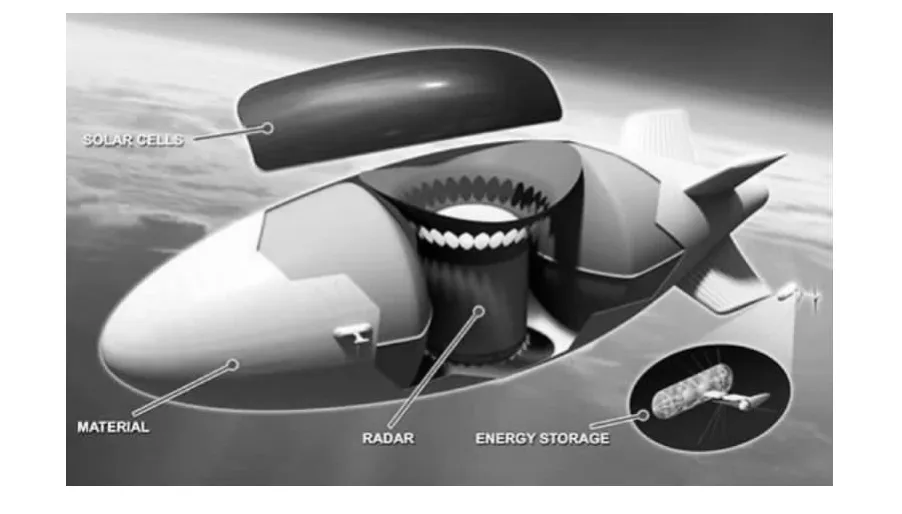
图3 ISIS项目示意图
平流层卫星(Stratellite)是升浮一体硬式飞艇,主要用于通讯和实时监视等领域,艇体材料采用双层凯夫拉尔纤维,外层覆盖柔性薄膜太阳能电池,采用电机动力推进系统,其最大续航时间可达18个月,可以回收维护,维护后的飞艇可以继续使用。2005年11月,第一艘Stratellite原型机完成试飞(见图4)。

图4 Stratellite平流层卫星原型机
临近空间机动飞艇“攀登者”集卫星和侦察机功能于一身,由地面遥控设备操纵,能完成高空侦察、勘测任务,也可用作战场高空通讯中继站。“攀登者Ascender”技术验证艇2004年进行了部分低空试验,但2005年两次试验分别因地面大风或上升过程中艇体超过压力极限破裂而损毁(见图5)。
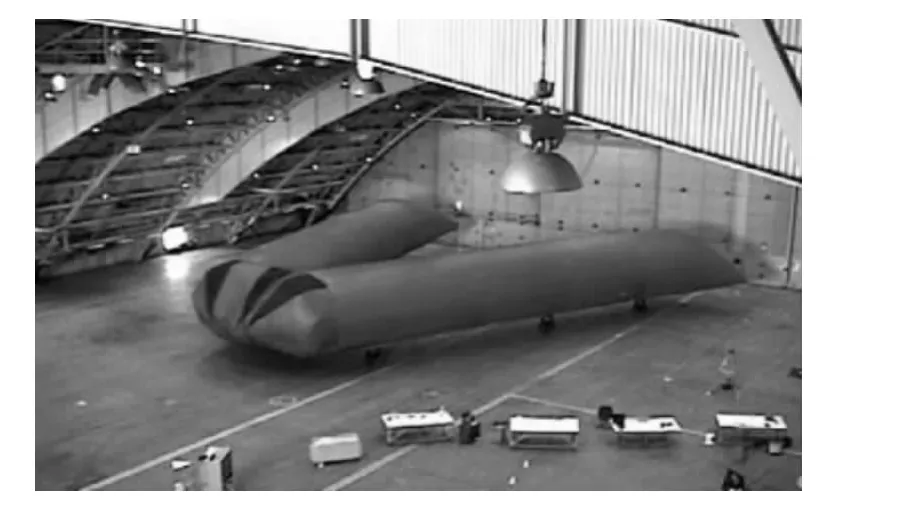
图5 攀登者Ascende临近空间飞艇
欧洲航天局在2000年3月联合德国宇航公司、英国兰德斯特朗气球公司和荷兰代尔夫理工大学,完成了对高空飞艇方案的初步评估,并投资研制“哈尔”半硬式高空飞艇,飞行高度20000米,搭载1000千克任务载荷,可连续留空5年,主要用于通信、对地球观察、大气科学研究和天文学研究等(见图6)。
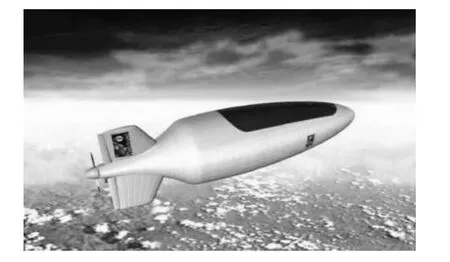
图6 欧洲局HALE飞艇平台
日本从上世纪80年代就开始了平流层飞艇的可行性研究。1998年成立了平流层飞艇通信平台开发协会,通过了平流层飞艇通信平台的国家立项,计划用15个平流层定点飞艇通信平台覆盖日本国土。2003年8月,日本航空航天技术研究所和海洋科学技术中心在茨城县发射了一艘平流层无动力试验艇,该艇飞行高度达16.4千米。2004年进行了8次滞空高度为4000米的低空演示飞艇的定点滞空飞行试验,对飞艇的制造、浮力控制、热控制、飞行控制等进行了验证,为实现建设通信和地球观测平流层平台构想奠定了一定基础。
3 变体飞艇的独特优势
临近空间飞艇的使用环境与常规对流层飞艇不同,其升空高度高,空气密度变化大,环境温度低,太阳辐射强,驻空持续时间长,昼夜变化超热/超冷严重,造成飞艇固定区间保持困难,对能源、动力、控制要求高(见图7)。
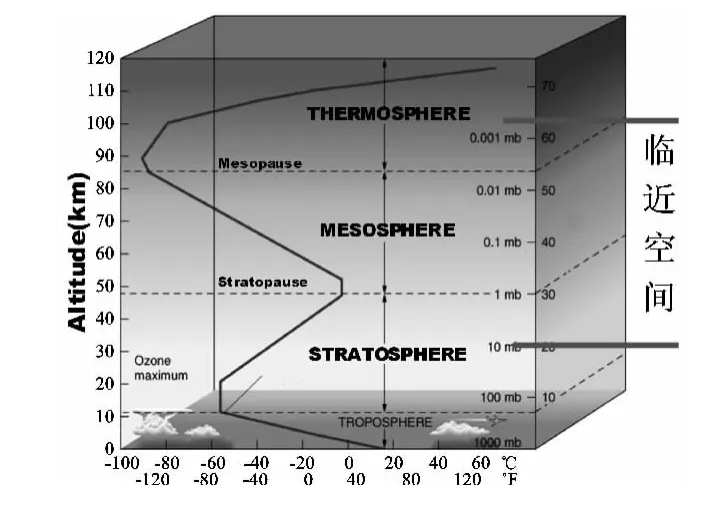
图7 临近空间区域划分
目前世界各国的临近空间飞艇大多采用常规飞艇布局,变体飞艇仍处于探索阶段。常规飞艇囊体由氦气囊和副气囊组成,主囊体体积保持不变,通过调节艇载配重和副气囊空气量控制净浮力和艇体压差,实现飞艇姿态调整、升降和驻空,升空高度越高,飞艇体积越大。因此,固定的囊体体积将限制飞艇升限。同时,压力调节系统效率低,能源消耗大,造成飞艇对囊体材料强度要求高,艇体结构、能源和压力调节系统等占系统重量比重大。
变体飞艇根据艇体内外压差,控制囊体自适应变化,获得高体积变化率,相对常规布局飞艇具有以下一系列独特优势。
3.1 减轻飞艇重量
重量是制约临近空间飞艇发展的重要因素,30千米临近空间的空气密度只有海平面的1.5%。自身重量越大,要求飞艇体积越大。变体飞艇采用微压差控制,艇体材料强度要求低,并取消副气囊,简化压力调节系统,降低了能源需求,可显著减轻临近空间飞艇平台重量,为有效任务载荷提供了更多应用空间。
3.2 提高飞艇升限
在起飞重量一定的条件下,变体飞艇升限只与空气密度和艇体体积变化率相关,其升限不再受艇体材料强度等相关技术的制约。
3.3 环境适应性高,持续驻空能力强
临近空间环境温度低,太阳辐射强,昼夜变化超热/超冷严重,飞艇净浮力变化范围大,造成临近空间飞艇驻空高度不稳定。常规布局飞艇通过释放氦气和艇载配重调整高度,但氦气和配重是有限的,因此,在临近空间环境,常规布局飞艇持续驻空能力是有限的。变体飞艇可根据起飞重量和最低巡航高度确定初始充氦量、艇体容积和体积变化率,其持续驻空时间的长短将取决于氦气泄露量。因艇体内外压差小,氦气泄露量仅与艇体材料本身透氦率和加工工艺相关,从而具有很强的持久驻空能力。
4 飞艇变体模式
飞艇有多种变体形式,但为适应临近空间环境变化,变体飞艇应以获得高体积变化率为目标,其高效变体模式可分为纵向变体和径向变体。
4.1 纵向变体
纵向变体是指飞艇横向截面基本不变或变化很小,通过变体控制机构使飞艇纵向尺寸发生变化,飞艇的长细比改变(见图8)。

图8 飞艇的纵向变体
4.2 径向变体
径向变体是指飞艇纵向尺寸基本不变或变化很小,通过变体控制机构使飞艇径向截面尺寸发生变化(见图9)。
图9 飞艇的径向变体
纵向和径向变体都是通过变体控制机构使飞艇外形尺寸发生变化,以获得高体积变化率。由于临近空间跨度高,大气压力和空气密度变化大。随着高度增加,大气压力和空气密度急剧下降,在有效载荷重量一定的情况下,飞艇升空高度越高,要求容积和体积变化率越大。
5 变体飞艇的主要关键技术
临近空间变体飞艇的关键技术是如何实现稳定、可靠的自主变体和飞行操稳控制。
5.1 飞艇变体控制技术
临近空间变体飞艇采用非常规布局型式,飞艇的主囊体由变体机构和用于提供浮力的软式气囊组成,通过变体机构控制囊体伸展或折叠。软式气囊为单气室结构,不设副气囊,内部填充氦气,根据内外压差调节囊体体积和保持飞艇外形(见图10)。

图10 变体飞艇工作原理
轻量化、高可靠、高体积变化率的变体机构与飞艇软式气囊的结构匹配性、高精度分布式微压差传感器系统和变体控制策略是飞艇变体控制技术的核心,有待进一步深入研究和验证。
5.2 飞艇飞行控制技术
临近空间飞艇技术研究的最终目标是实现长期驻空并返场,可重复利用的飞艇平台。
变体飞艇在轻重量设计、持久驻空和高度调整、保持等方面具有独特的应用优势,但在上升、驻空和低空返场控制技术仍有待研究。
以成功进入平流层的HiSentinel高空哨兵为例,采用非保形上升,到达预定高度后氦气膨胀成型,进入驻空飞行阶段,下降至一定高度后囊体爆破,艇载任务设备降落伞回收。其载重小,连续驻空时间短,无法定点返场,不可重复使用(见图11)。
变体飞艇在低空采用流线型气动外形,降低低空阻力。高空通过变体保持流线型柱状体外形。通过不同阶段气动外形设计、高低空动力推进系统布局和舵面操控等飞行控制技术,保证飞艇在高低空具有良好的飞行控制性能(见图12)。
6 结语
图11 高空哨兵飞行控制模式
变体飞艇结合了传统自由气球和飞艇的特点,是一种新型的,有待继续探索的浮空器,其关键技术是变体和飞行控制技术。笔者针对临近空间飞艇高效变体模式和关键技术进行了初步分析,为临近空间飞艇安全上升、稳定驻空和可靠返场提出相应的解决途径,可为临近空间飞艇后续研究提供参考。
[1]Lockheed Martin to build high altitude airship under$149.2million missile defense agency contract[EB/OL].[2005212230]http://www.lockheedmartin.com.
[2]Michael S S,Edward L R.Applications of Scientific Ballooning Technology to High Altitude Airships[R].AIAA200326711,2003.
[3]姚伟,李勇,王文隽,等.美国平流层飞艇发展计划和研究进展[J].航天器工程,2008,17(2):69-75.
[4]李晓阳.变体飞艇创新技术及其科学意义[J].前沿科学,2008,2(6):53-62.
[5]许晟.平流层变体飞艇技术研究[C]//贵阳:第十四届全国计算流体力学会议论文集,2009.
[6]谭惠丰,王超,王长国.实现结构轻量化的新型平流层飞艇研究进展[J].航空学报,2010,3(2):257-264.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
中国舰船研究(2022年2期)2022-04-26
空间科学学报(2020年1期)2021-01-14
中国舰船研究(2016年6期)2016-12-12
太空探索(2016年12期)2016-07-18
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
