
基于Matlab/Simscape的自动控制原理虚拟实验平台
2013-10-20 05:47:00高兴泉王立国刘广平
实验室研究与探索 2013年9期
高兴泉, 王立国, 刘广平
(1.吉林化工学院信息与控制工程学院,吉林 吉林 132022;2.吉林省扶余县农电有限公司,吉林 松原 131200)
0 引言
由电阻、电容和电感等电气元件构成的电气网络系统是典型的、线性化程度比较高的理想控制系统模拟对象,目前国内大部分高校的自动控制原理实验都是在这样的电气网络系统中进行的[1-2]。在硬件实验台上做自动控制原理实验室时,为了更好地分析系统有时需要大量更换或调整相应元器件来改变控制系统的结构和参数,这样非常麻烦,也大大提高了实验的成本。另外,如果学生对实验准备不充分,频繁的误操作可能会缩短实验系统的寿命,并且在有限的时间内实验的效率也不会很高。因此开发虚拟实验台实现计算机的模拟演示来作为硬件实验前的补充[3-5]是非常必要的。
数字仿真是解决该问题的一个有效途径,它可以方便地模拟各种物理性质各异的控制系统,而它比物理仿真更具有良好的适应性。数字仿真有两种方式,一种用单纯的数学模型,即根据机理建立数学表达式,通过对该表达式进行求解来分析和设计系统[6-8],但这样不直观,学生很容易失去兴趣。另一种数字仿真就是用物理模型来建立仿真系统,用某些软件提供的对应于实际物理系统的物理模型模块像搭积木似的构建一个系统模型,构建仿真系统的元部件对应于实际物理真实系统的元部件,这样非常直观,仿真系统搭建的过程和实际的硬件连接过程一致,会大大激发学生的学习兴趣。
Matlab里面的Simscape工具箱就提供了类似的工具[9-10]。Simscape模块集包括电、磁、力、热、液等在内的基础模块库,还有更专业的、集成度更高的模块集,电气系统仿真模块集也可以看作其一个组成部分。这些模块集的目标是提供一系列部件模块,允许用户像组装实际硬件系统把相应的模块组装起来,构造出整个的仿真系统[11-13],而系统所基于的数学模型会在组装过程中自动建立起来。
本文以二阶电气网络系统为例介绍了利用Simscape来建立自动控制原理虚拟实验台的方法,并以该系统的单位阶跃响应分析和频率响应特性曲线绘制为例,详细阐述了该实验系统的使用方法。并用自动控制理论分析了仿真实验平台运行的准确性。结果表明,作为硬件实验前的有效补充,在虚拟实验平台上的仿真实验过程和实际硬件实验过程一致,可极大激发学生的实验兴趣,提高实验效率。
1 二阶电气网路系统
考虑一个二阶的电气网络系统其模拟电路图,如图1所示。忽略一些非线性因素,该系统可以看做是一个典型的二阶线性系统[14],主要由理想运算放大器、电容、电阻等电气元件组成。该系统对学生了解掌握二阶系统特性如时域性能指标分析、频域特性曲线绘制等方面的知识是非常有帮助的。根据电路特性,可以方便地求出该系统的传递函数[14-15]:

在本例中,取 R1=R2=200 kΩ,C1=1 μF,C2=10 μF,电阻Rx为可调电阻。记RxC2=τ,则闭环传递函数(1)可写为

图1 二阶系统的模拟电路图


式中:T为二阶系统的时间常数;ζ为典型二阶系统的阻尼比。因此,可以改变Rx的大小来改变系统的参数T和 ζ。
2 基于Matlab/Simscape的电气网络仿真模型建立
Simscape是MathWorks公司开发的全新的多领域面向对象的物理建模工具[9]。目前,Simscape基础模块库包括电力液压气动磁和热等子模块组,还包含与物理信号及其转换相关的1个子模块组。其中电模块组是本实验台构建主要用的模块组,它也由3个子模块组:电元件、电输入源和电传感器,它们包含了基本的电气元件包括电容、电感、电阻、运算放大器等电子元件及受控电压源、电压传感器、电流传感器、接地模块等。建立1个SIMULINK文件,并利用这些基本的模块,可建立1个模拟二阶电气网络系统的物理仿真系统,如图2所示。
用Simscape组件搭建该系统时,需要注意以下几点:
(1)可以双击相应的模块打开该模块的参数输入对话窗来输入或修改该模块描述的元件的参数。例如打开电容模块的参数输入对话窗可以输入电容本身的电容量、串联等效电阻、并联电导及电容初始电压等参数。

图2 用Simscape组件建立的二阶系统模拟电路图
(2)引入物理仿真框架后,在Simscape仿真框架下将出现两类信号,一类是常用的Simulink信号,另一类是物理模型对应的物理信号,这两类信号在仿真框图中是并存的,但由于定义不同,这些信号线不能互相直接连接,它们之间的混用需要调用相应的模块进行转换后才可以实现。即物理信号直接相互转换的模块(PS-Simulink Converter和 Simulink-PS Converte r)。
(3)电气模块组有自己的参考点模块,就是接地模块。
(4)为了使该系统能和其他SIMULINK数值仿真模块连接并通信,同时为了利用SIMULINK里提供的一些工具来分析系统,设定该系统的输入端口和输出端口的数据类型为数值信号,在系统内部它需要经过信号转换并把它连接一个受控电压源可以给系统输入一个相应大小的直流电压信号,电压信号的大小可通过输入端口的数值来指定。同样将输出的电压信号通过信号转换模块转换为数值信号,这样可用普通的SIMULINK示波器模块进行实时观察系统运行的结果。
(5)每个仿真模型中必须给出仿真参数设置模块(Solver Configuration),否则仿真模型不能运行。
(6)在仿真系统中,传递的都是物理信号,信号的检测必须经过相应的传感器来测量,例如电压信号必须用电压传感器模块来测量得到。
3 仿真实验
在建立的模拟电气网络系统中,可以进行相应的仿真实验来分析系统的某方面的特性。下面以二阶系统的单位响应和频率特性分析来介绍在模拟实验系统上实验的方法和具体的实验过程。
在建立的仿真实验系统上,观察系统的单位阶跃响应有两种实验方式。一种方式如图3所示,手动外接SIMULINK数值模型模块的仿真实验方式。例如对于如图2建立的系统,可以对该仿真系统进行封装后在该系统的输入和输出端口中分别接入阶跃信号(Step)模块和示波器(Scope)模块,运行系统后可在示波器内观察系统的阶跃响应。
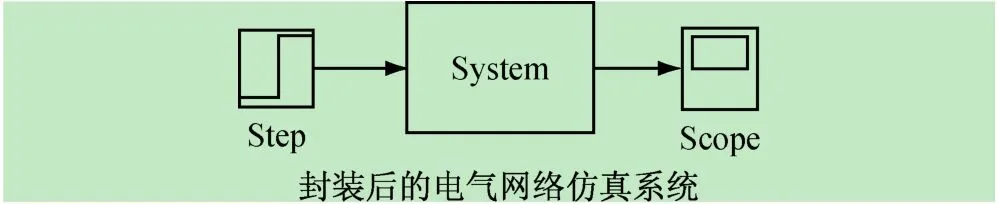
图3 外接信号的仿真实验方式
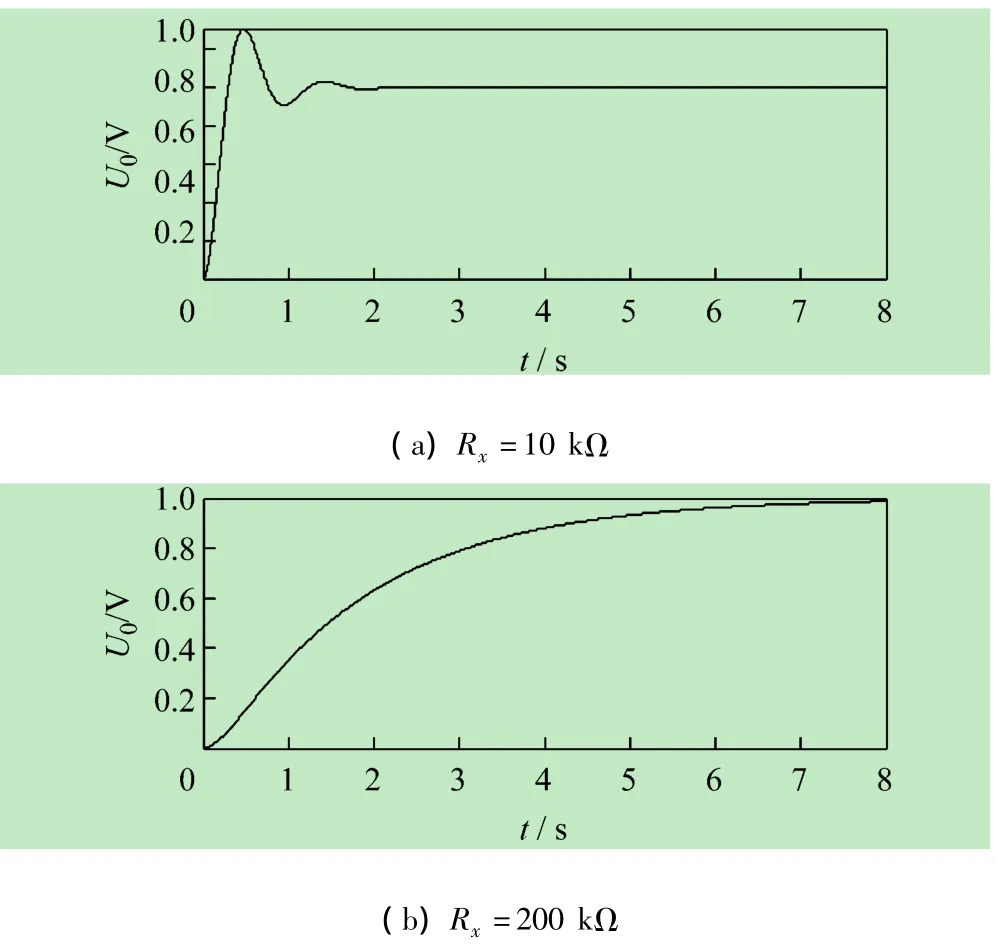
图4 仿真系统单位阶跃响应曲线
假设阶跃模块的参数设为阶跃时间为0,阶跃幅度为+1。分别取Rx=10 kΩ和Rx=200 kΩ,运行仿真系统后可得如图4所示的仿真结果(为了便于比较和分析,把两种情况下的响应曲线画在一张图上)。当Rx=10 kΩ时,根据式(2)可以计算出系统的阻尼比为ζ=0.353 6,该系统此时是欠阻尼二阶系统,其单位阶跃响应具有震荡、有超调并收敛于1的响应形式。当Rx=200 kΩ时,可以求出ζ=1.581 1,该系统为过阻尼二阶系统,其单位阶跃响应具有单调收敛于1的响应形式。仿真结果和理论分析是完全一致的。
这种方式用户还可以选择其他的输入信号,例如斜坡信号、正弦信号等标准信号或用户自定义的信号,所以这种实验方式比较通用。另一种仿真实验方式是利用SIMULINK提供的工具进行。保持图2中系统的输入输出端口不变,利用SIMULINK提供的控制设计(Control Design)工具里的线性分析(Linear Analysis)在线性时不变系统浏览器中观察单位阶跃响应波形。
除了观察系统单位阶跃响应外,还可以观察系统的单位脉冲响应曲线、波特图、奈奎斯特曲线、尼克尔斯曲线、系统零极点分布图等等。例如对于图1所示系统,选择参数Rx=10 kΩ,在线性时不变系统浏览器选择波特图绘制,会弹出绘制的结果图,如图5所示。
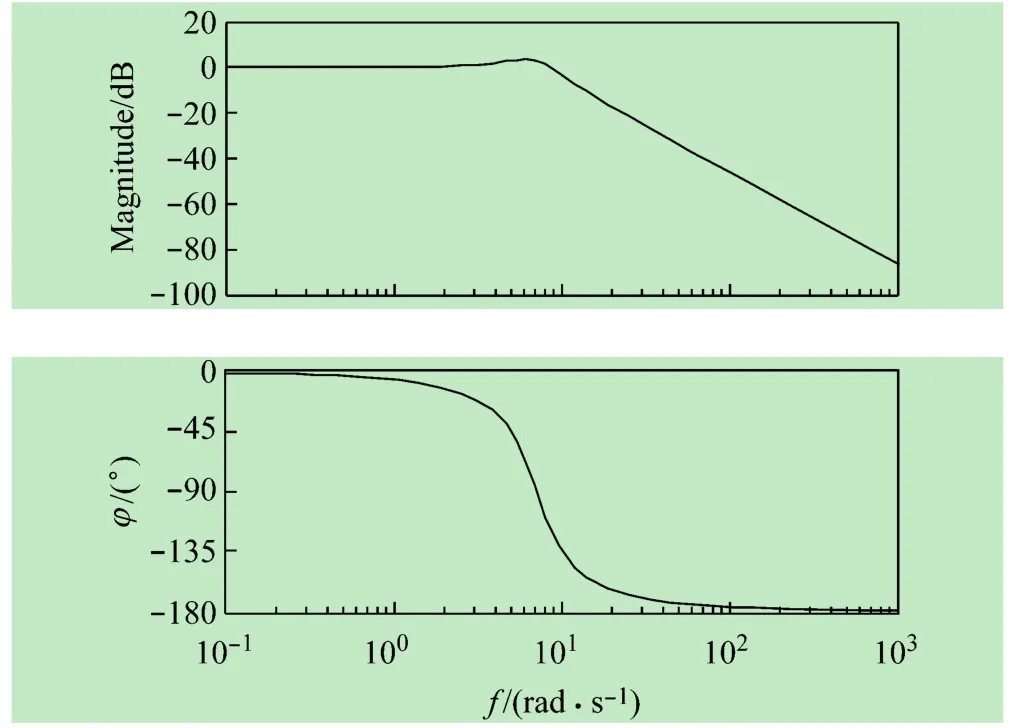
图5 Rx=10 kΩ时利用线性时不变系统浏览器绘制波特图
上述分析得知:取Rx=10 kΩ时,系统的阻尼比为ζ=0.353 6,因为 ζ<0.707,所以系统的幅频特性曲线在一定频率范围内是有超调的,相频特性曲线从0°单调下降到180°,仿真曲线和理论分析也是相一致的。
除了上述的二阶电气网络系统外,我们根据自动控制原理课程的要求,建立不同的电气网络系统来进行相关内容的分析,如典型环节动态性能分析、高阶系统稳定性分析、线性定常系统的校正、线性系统的极点配置等等。
4 结语
将基于Matlab/SIMSCAPE的自动控制虚拟实验系统应用于“自动控制原理”课程的教学,该模拟系统的搭建过程和在实际硬件系统上实验的连线过程相一致,能使学生能直观地领会和理解自动控制原理课程的分析方法和处理结果,对调动学生的学习积极性以及提高学生的实验效果和实验兴趣都是有相当大的作用,并可极大地降低实验成本,提高物理实验的效率。
[1] 程 鹏.自动控制原理实验教程[M].北京:清华大学出版社,2008.
[2] 降爱琴.自动控制原理及系统实验实训教程[M].北京:中国电力出版社,2009.
[3] 王建辉,徐 林,顾树生.自动控制原理实验教学的改革[J].实验室研究与探索,2005,24(S1):192-195.
[4] 董海瑞,齐晓慧,袁贺德,等.基于MATLAB的“自动控制原理”虚拟实验仿真平台[J].实验室研究与探索,2007,24(S):216-219.
[5] 结 硕,韩光胜.Matlab在自动控制原理实验中的应用[J].实验技术与管理,2012,29(2):95-98.
[6] 肖田元,范文慧.系统仿真导论[M].北京:清华大学出版社,2010.
[7] 李 露,史振威,周付根.基于Matlab/Simulink的幅度调制与解调综合实验设计[J].实验室研究与探索,2011,30(1):96-99.
[8] 肖理庆,李 巍.“自动控制原理”实验教学改革[J].电气电子教学学报,2012,34(3):88-90.
[9] 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2011.
[10] 钱 森,訾 斌,曹建斌,等.基于Matlab/Simscape的汽车起重机变幅机构的优化与仿真[J].机械传动,2012,36(8):40-43.
[11] 陈柏松,伍先俊,李 兢.基于Simscape的2级双作用液压缸的建模仿真研究[J].机械制造,2009,47(4):6-8.
[12] 马 钧,何娅伶,于玉真.基于Simscape的塑料-钢螺旋蜗轮蜗杆稳态热分析[J].2011,35(5):413-416.
[13] 姚 磊.基于Simulink的流体管网仿真[J].大功率变流技术,2010(5):5-8.
[14] 邱关源,罗先觉.电路[M].北京:高等教育出版社,2011.
[15] 胡寿松.自动控制原理[M].北京:科学出版社,2007.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
装备制造技术(2021年4期)2021-08-05 07:39:12
应用数学(2020年2期)2020-06-24 06:02:46
数学物理学报(2018年6期)2019-01-28 08:58:02
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
天津教育·下(2018年9期)2018-07-13 08:25:47
电子测试(2018年6期)2018-05-09 07:31:47
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:44
铁道通信信号(2016年12期)2016-06-01 12:11:58
海峡科技与产业(2016年3期)2016-05-17 04:32:11
