
基于PLC的渔船吸鱼装备控制系统
2013-10-17 05:24林雯雯刘国平苏玉香袁跃锋
机电设备 2013年3期
林雯雯,刘国平,曾 鹏,苏玉香,袁跃锋
●(浙江海洋学院,浙江舟山 316000)
基于PLC的渔船吸鱼装备控制系统
林雯雯,刘国平,曾 鹏,苏玉香,袁跃锋
●(浙江海洋学院,浙江舟山 316000)
介绍了吸鱼装备的结构组成及其工作原理;结合PLC技术,根据其抽气控制系统、吸鱼控制系统和排鱼控制系统,确定系统I/O模块。设计出具有自动控制、循环的PLC控制系统,以改善现今渔船的生产力水平。
I/O模块;PLC控制系统;吸鱼装备
0 引言
近些年,吸鱼泵在渔获的起卸和传送上使用越来越广泛,效果十分显著[1]。而目前大多数使用的吸鱼装置,主要由继电器、接触器控制。系统触点繁多,接线线路比较复杂,且触点开闭时存在机械磨损、电弧烧伤等现象,触点寿命短,所以可靠性和维护性较差;在控制逻辑上,因为继电器触点数量有限,其灵活性和可扩展性受到很大限制,自动控制性能较差。
PLC(可编程控制器)系统以其连线少,体积小,可靠性高,编程简单,易于修改、性价比高等特点被现代工业广泛应用。基于PLC的渔船吸鱼装置控制系统,提供一种全自动抽吸渔获的装置,且能在完成一次循环后自动进行下一循环,无需人员监控操作,可减轻船员负担,提高渔船生产力水平。
1 系统的基本组成
真空吸鱼装置是由钢制真空集鱼桶、水环式真空泵、各类传感器、PLC电气控制箱、进出气电磁阀、出鱼水密封口门、吸鱼软管等主要部分组成。其结构形式如图1所示[2]。
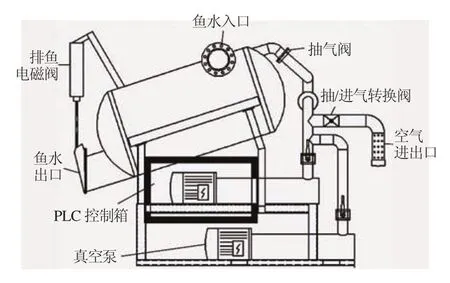
图1 真空吸鱼泵结构图
对整个吸鱼装置而言,真空集鱼桶是主要部件。首先要求在抽真空时不漏气,要注意各连接部位的加工工艺及配套密封胶圈,所连接的吸鱼胶管有无脱落,损坏,老化,开裂或连接太松。其次是集鱼桶体内壁必须光滑,无转动部件,当鱼被吸入时不与桶体产生磨擦,鱼体不受损伤,且可抽吸活鱼[3]。
真空泵通过导管连接到集鱼桶的顶端,其导管和集鱼桶的连接处设有抽/进气转换阀。当需要吸鱼时,PLC控制系统控制抽气阀打开,真空泵将集鱼桶内抽成真空。当需要排鱼时,则通过抽/进气转换阀切换到进气状态,通过气压将鱼水排出。集鱼桶内的顶部设有高水位传感器,当鱼水吸入到集鱼桶预设的水位时,将该信号传送到PLC控制系统停止吸鱼。集鱼桶上设置有检测集鱼桶内部气压的真空表,随时监测桶内气压变化。鱼水入口设有电磁阀门,与吸鱼软管连接,鱼水出口由密封门密封,由电磁阀开启和关闭。
一般情况下,性能理想的真空吸鱼泵应具备以下条件:1)平稳抽吸,在输送鱼货时,应避免抽吸不平稳而损伤鱼体,使鱼货变质控制在最低限度;2)高效率,尽可能的缩短对渔获抽吸,排卸的时间;3)设备应防锈、耐磨,以节省停工检修的时间;4)具有处理大量固态物体的能力,尤其是处理鱼舱底部的渔获物能力。
2 系统硬件组成
2.1 I/O模块及点数的选择
I/O模块的确定,是PLC系统设计的重要内容。首先根据被控对象的输入信号和输出信号的总点数,并要考虑今后调整与扩充,估算I/O的点数。其次还得考虑到I/O模块开关量输入模块和开关量输出模块的选择。进行相应的I/O地址分配,并据此绘制I/O接线图[4]。
2.1.1 输入点分析
1)抽气控制。主要包括真空泵的报警控制和起停控制。报警控制根据鱼舱里鱼水液面的高低,过高过低都将报警;起停控制是根据鱼舱里鱼水液面达到一定要求,即可手动启动,且在下一循环里自动对桶体进行抽气。如鱼舱鱼水液面过低,则报警30s;如无指示自动切停真空泵运转。也就是在输入信号时,由三个模拟量输入。所以需要三个输入量、一个启动真空泵开关、一个启动吸鱼装置开关、一个复位键和一个停止按钮,共需要7个输入点。
2)吸鱼控制。只要达到所设定的真空度便可控制吸鱼阀开启,所以只需一个信号,即1个输入点。
3)排鱼控制。利用高水位传感器控制桶体水位,达到要求即可排鱼。从开始排鱼到排鱼结束开始下一循环由时间继电器控制,时间设定为20s。所以排鱼控制过程只需1个输入点即可完成。
2.1.2 输出点分析
1)抽气控制。检测鱼舱内鱼水的水位,当水位过高,蜂鸣器响起,同时黄色警示灯亮;当水位过低,蜂鸣器响起,同时红色警示灯亮;当水位适中,则绿色指示灯亮,提醒操作者可进行下一步操作。即启动真空泵,打开抽气阀门。总共需要7个输出量。
2)吸鱼控制。在对桶体抽气达到一定真空度时,便打开吸鱼电磁阀。对应1个输出数字量。
3)排鱼控制。高水位传感器感应到液位达到要求,控制转换阀使抽气变送气,同时控制排鱼电磁阀打开。对应2个输出量。
综上所述,PLC所需的输入/输出点数量确定结果如表1、表2所示。

表1 输入模块对应用途

表2 输出模块对应用途
2.2 PLC配线图
确定了系统被控对象后,PLC的线路设计是硬件设计的主要工作,线路的设计也就是整个系统电路的连接。在所有的电器元件中PLC起着核心的作用。与传统继电器、接触器控制系统相比,不仅大大简化了系统复杂程度,也提高了系统可靠性和稳定性。从本质上来看,基于 PLC的吸鱼装置控制系统的控制思路仍然与继电器、接触器控制系统相似。只是在控制手段上采用了更先进控制设备。这样更有利于被操作人员接受及掌握。吸鱼装置PLC控制系统配线图,如图2所示。
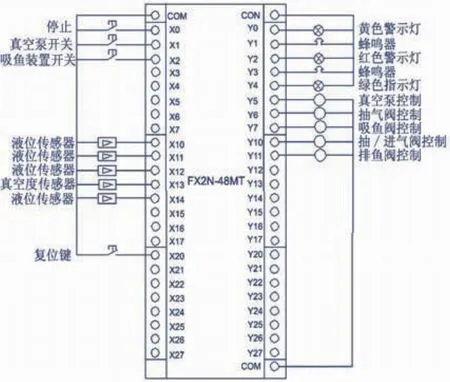
图2 吸鱼装置PLC配线图
3 系统自动控制软件设计
PLC控制程序主要由一个主程序和若干子程序构成。在软件设计中,按照系统功能要求,根据不同模块具体作用,做出如图3所示的流程图。

图3 PLC控制程序框图
真空吸鱼装置的具体工作过程是将吸鱼软管放入一定鱼水比例的鱼舱中,其鱼水比例一般为1:1甚至更高,此时启动控制箱面板上的真空泵开关 X1,水环式真空泵Y5开始工作。等水环式真空泵正常运行后,起动吸鱼装置开关X2,真空集鱼桶的抽气电磁阀Y6即打开,而吸鱼水进口阀则处于关闭状态,排鱼水的密封门也同时闭合。集鱼桶内整个系统被抽气形成负压,当真空度传感器X13感应到桶内负压达到一定真空度时,立即反馈给PLC,控制吸鱼口电磁阀 Y7自动开启,鱼、水通过吸鱼软管被吸入到集鱼桶内。等高水位传感器X14感应到桶内水位达到所设定的高水位时,高水位传感器立即把信号反馈给PLC,使抽/进气阀Y10转换,转换阀便由向集鱼桶抽气状态转变成向其送气加压状态。同时打开鱼、水出口阀 Y11,在向桶内加压的同时将鱼、水排送到指定位置,完成延时排鱼出水工作。PLC自动控制系统在实现上诉工作的同时,自动循环以上工作程序和步骤。这样,就能间歇式地达到吸鱼装置输送渔获的目的[1,5]。
吸鱼装置的吸鱼软管置于装满鱼的鱼舱内,舱内装有三个液面传感器。当鱼舱内的鱼即将抽吸完毕时,处于最低位置的传感器即报警,并在报警30s内未做出相应解决动作便向泵发出停止工作的信号。当鱼舱重新装进鱼时,第二个传感器启动,发出信号,便可人为的启动真空泵,使泵高速运转,开始工作。第三个传感器装于鱼舱顶部,作为辅助防护措施,如果渔获物液面接触该传感器,则声光报警显示,表示停止向鱼舱输送渔获物,以防鱼舱过满。上述3个传感器分别连接到PLC控制系统的I/O口X10、X11、X12。
4 结论
本文根据目前吸鱼装置所存在的不足,基于PLC系统对其进行优化、改进。介绍了吸鱼装置的基本组成,明确了系统研究对象。在硬件设计上,通过将被控对象按功能进行相互独立的分解,确定I/O模块,对其进行线路连接。
在软件设计上,画出具体程序框图,采用三菱FX2N系列PLC对渔船吸鱼装备进行自动化控制,实现了吸鱼过程的基本功能,充分发挥了PLC系统的优点。从而优化了电路的控制结构,提高了设备运行的稳定性和可靠性。
[1]叶燮明, 徐君卓. 国内外吸鱼泵研制现状[J]. 现代渔业信息, 2005(9): 7-8.
[2]黄滨, 关长涛, 林德芳, 等. 网箱真空活鱼起捕机的研究[J]. 海洋水产研究, 2004(3): 54-60.
[3]叶燮明, 徐君卓. 网箱吸鱼泵的研制和试验[J]. 渔业现代化, 2003(3): 25-26.
[4]王万新. 基于 PLC的开放式数控车床系统开发研究[J]. 机械设计与制造, 2008(9): 160-162.
[5]朱健康, 丁兰. 深水区大型抗风浪网箱配套设施系统[J]. 福建水产, 2005(4): 70-72.
Control System in Finishing Installation for Fishing Vessels Based on PLC
LIN Wen-wen, LIU Guo-ping, ZENG Peng, SU Yu-xiang, YUAN Yue-feng
(Zhejiang Ocean University, Zhejiang Zhoushan316000, China)
The structures about the fishing installation and its works principle were introduced. According to the exhaustion control system, fish intake control system and the fish eduction control system, with PLC technology, its specific automatic and circular control circuit system were designed to determine the I/O module of the system in order to improve the level of the productivity created by modernized fishing vessels.
I/O module; PLC control; fishing installation
TU85
A
浙江省重大科技专项计划项目“大型远洋拖网加工渔船吸鱼装备关键技术研究与应用”(2011C11070);2012年浙江省大学生科技创新活动计划(新苗人才计划)资助项目(2012R411048)。
林雯雯(1988-),女,硕士研究生。研究方向:渔船装备与技术。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
水泵技术(2022年2期)2022-06-16
科技视界(2021年4期)2021-04-13
东坡赤壁诗词(2020年3期)2020-07-04
造纸信息(2019年7期)2019-09-10
女士(2017年9期)2017-09-21
中国经济周刊(2016年18期)2016-05-14
税收征纳(2015年12期)2015-04-09
中国科技纵横(2014年12期)2014-12-10
压缩机技术(2014年4期)2014-03-20
