
基于动态贝叶斯网络的调距桨任务可靠性模型及应用
2013-10-17 05:24王校锋
机电设备 2013年3期
王校锋,戚 珩
●(1.海军装备部上海局,上海 200083;2.中国船舶重工集团公司第704研究所,上海 200031)
基于动态贝叶斯网络的调距桨任务可靠性模型及应用
王校锋1,戚 珩2
●(1.海军装备部上海局,上海 200083;2.中国船舶重工集团公司第704研究所,上海 200031)
为了解决调距桨在可靠性分析时动态的、可修复性的问题,引入了一种基于动态贝叶斯网络理论的新方法,提出了动态的和可修复的可靠性建模分析技术,弥补了传统方法在动态可靠性分析时模型描述上的局限性及算法上的缺陷问题。在模型方面,用贝叶斯网络能有效地刻画系统的动态行为、修复行为;在此基础上建立了系统任务可靠度数学模型,运用MATLAB软件中贝叶斯网络工具箱编写了MATLAB计算语句,输入有关元件的故障率与修复率能够实现推进装置的任务可靠性数值仿真。
贝叶斯网络;动态系统;任务可靠性;建模
0 引言
可调螺距螺旋桨(简称调距桨)是近几十年来迅速发展起来的一种船舶推进装置,其桨叶可绕垂直于桨轴的轴线转动,从而改变螺距,实现船舶的变速、正车和倒车。调距桨推进装置是一个典型具有动态性和可维修性的复杂高可靠性的系统,一般含有许多冗余或备份部件,设计者最关心的是任务可靠性,即在规定的任务时间和维修保障条件下完成规定的任务能力。用任务可靠性来表征可靠性的优点是能直接说明产品完成任务的能力强弱,它不仅与调距桨自身的功能结构和可靠性参数有关,还与任务执行时间、任务要求、装备维修保障能力等多种因素有关。传统可靠性评估方法建立在可靠性框图、故障树和事件树等静态模型基础上,而调距桨装置任务可靠性预测则属于动态可靠性研究范畴,目前这方面的研究存在的主要困难在于动态系统的复杂性,使得静态系统中的一些成熟的可靠性模型无法处理这种具有时序性并具有多种复杂情况的随机过程,这就需要针对复杂系统的特点研究全新的方法来处理。现有的研究成果包括在静态技术的基础上扩展出的动态故障树[1]、离散/连续动态事件树[2]、动态可靠性框图[3],GO及GO-FLOW技术[4]、动态Petri网技术[5]、Markov模型[6]等动态建模和分析方法。
本文引入动态贝叶斯网络理论,提出基于动态性和可修复性的可靠性建模分析技术,在模型方面,用贝叶斯网络能有效地刻画系统的动态行为、修复行为;在此基础上建立系统任务可靠性数学模型,运用MATLAB软件中贝叶斯网络工具箱并编写MATLAB计算语句,输入有关元件致命性故障的故障率与修复率进行求解,实现推进装置的任务可靠性数值仿真。
1 调距桨装置可靠性建模
调距桨推进装置包括:桨毂组件、轴内油管、配油机构、液压系统、电控系统5个部分,其结构组成如图1所示。

图1 调距桨装置结构组成
在调距桨装置中,液压系统、配油机构、电控系统属于可修系统,上述系统的某些单元出了故障后可以在不中止调距桨装置运行的情况下通过替换或者修复失效组件的方法使系统恢复到正常状态,将这类维修称为舰员级维修。修复的过程中调距桨采用其他备用运行方式继续运转,例如,当调距桨装置的中心控制箱故障之后,随动控制随即失效,这时需要切换到手动控制(非随动控制)即可通过控制换向阀来实现调距,系统功能未丧失。与此同时,维修人员在调距桨运行的同时对故障设备展开维修,这一行为通过维修度来衡量。调距桨装置的冗余运行方式如图2所示,其中,运行方式1为螺距随动控制(图3),运行方式2为机旁非随动控制(图4),运行方式3为应急控制(图 5)。然而,这些系统冗余以及船上备件方案是否能够有效地提高装置的任务可靠度,需要精确的计算模型加以确定。

图2 调距桨装置任务可靠性模型
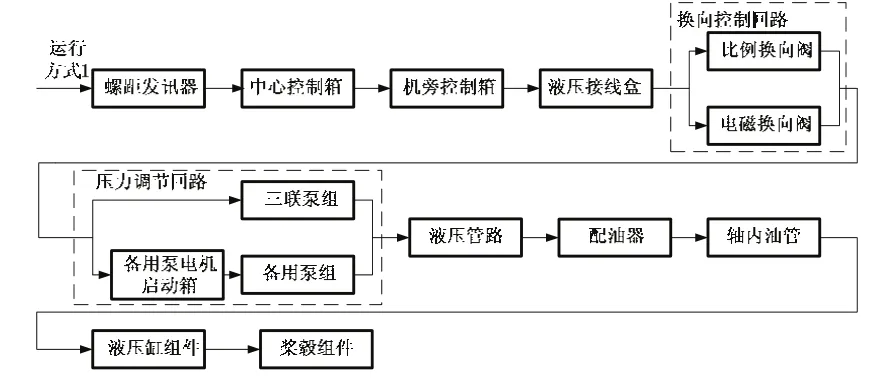
图3 运行方式1的任务可靠性模型

图4 运行方式2的任务可靠性模型

图5 运行方式3的任务可靠性模型
2 动态贝叶斯网络建模
2.1 动态贝叶斯网络的基本原理
动态贝叶斯网(Dynamic Bayesian Network, DBN)是初始贝叶斯网络在时间上的一种扩展,可以有效地处理时序性和可维修性问题。这里的“动态”指的是建模的系统是动态的,而不是说贝叶斯网的结构是动态变化的。下面介绍这种方法。
对于一个BN图,若记随机变量集为X={X1, X2, …, Xn},Xi代表图中的对应节点,Pa(Xi)表示节点Xi的父节点集,用表示变量在t时刻的状态。在BN理论中,一个BN是包含了在X上联合概率分布的有向非循环图G。具有同一父节点Pa(Xi)的每个节点Xi与不是Pa(Xi)子节点的那些节点相互条件独立。根据贝叶斯网络理论的基本原理,一个BN可以定义为:BN=(G, θ),式中,G是X上联合概率分布的有向非循环图;表示网络的参数。其中,X上联合概率分布定义为:

DBN模型则是将这种表述扩展到模型化含时间因素的随机过程。也就是说,动态贝叶斯网络由静态贝叶斯网络相互连接而成,为了能够对复杂系统进行研究并建立相应的模型,需要做一些假设和简化处理。
1)假设在一个有限的时间内条件概率变化过程对所有t是一致平稳的。
2)假设动态概率过程是马氏的,即每一时刻的状态变量集合只与前一个时刻的状态变量的取值有关而与过去时刻无关,满足P(Xt|X0, X1, …, Xt-1)=P(Xt|Xt-1)。
3)假设相邻时间的条件概率过程是平稳的,即在相邻两个时刻的状态变量之间的转移概率、每个时刻的状态变量集及状态变量间定性的依赖关系是独立于时间的,不会随着时间而改变。
动态贝叶斯网络是建立在静态贝叶斯网络和隐Markov模型基础上的图形结构。基于上述假设,DBN由初始网络和转移网络构成,因此,动态贝叶斯网络可以定义为(B0, B→),其中B0是第一个时间片的节点状态(初始贝叶斯网络),B→代表了系统的初始状态,从图中可以得到任意节点的先验概率P(X0)。是一个包含多个时间片的贝叶斯网络,即转移网络。其中每个时间片段对应一个静态贝叶斯网络,而两个时间片之间的有向弧代表了变量之间的前后因果关系,这种关系的强弱由转移概率表示。B→定义了两个相邻时间片的各变量之间的条件分布,即
节点Xti的父节点可以在同一个时间片内,也可以在前一个时间片内。同一时间片段内的边可以理解为瞬时作用,而跨越时间片的边可以理解为时变作用,反映了时间的流逝。
2.2 动态贝叶斯网络的条件概率
由于文中动态贝叶斯网络主要从动态故障树转化而来,因此,主要讨论动态与门、动态或门和动态备件门向动态贝叶斯网络的转化,条件概率主要包括两个方面:1)相同时间片内节点之间的条件概率;2)两个时间片之间同一节点状态转移的条件概率。
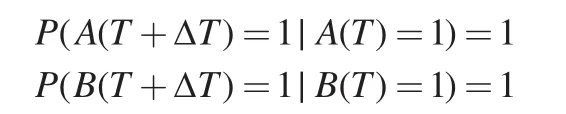
1)逻辑“与门”到动态贝叶斯网络的映射(图6)
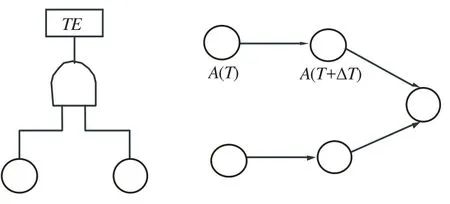
图6 “与门”的动态贝叶斯网络表达

注:条件表中else表示其它情况,下同。fA(t)表示底事件A的失效概率密度函数;gA(t)表示底事件A的维修密度函数。
如果事件A和B属于不可维修单,即gA(t)=0,gB(t)=0,则:
2)逻辑“或门”到动态贝叶斯网络的映射(图7)
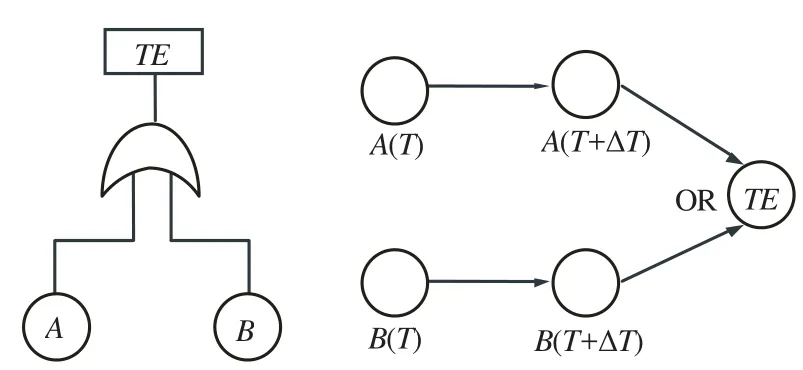
图7 “或门”的动态贝叶斯网络表达
节点A(T+ΔT)、B(T+ΔT)的条件概率分布和“与门”相同,节点TE的条件概率分布为:

3)温备件门到动态贝叶斯网络的映射
根据温备件门的时序逻辑关系,分析图8(a)中包含一个主部件和一个备份部件的温备件门,可以得到与之相对应的动态贝叶斯网络,如图8(b)所示,其中各节点的条件概率分布为:

式中,fαs(t)为S处于备份期的失效密度函数。
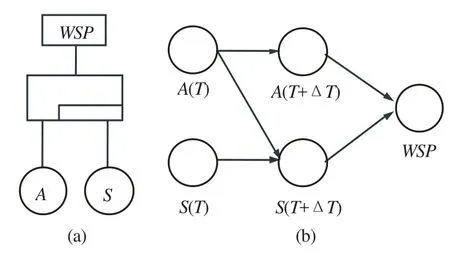
图8 温备件门的动态贝叶斯网络表达
根据各动态逻辑门对应的DBN,可以很快将DFT转化成DBN,在此基础上,可以利用DBN的优点来克服DFT的缺点,并扩展DFT的假设。
2.3 调距桨装置动态贝叶斯网络模型
根据图2~图5所示的任务可靠性框图建立相应的动态贝叶斯网络模型,如图9、图10所示。取时间片大小为ΔT,图中黄色节点代表T时刻的节点状态,蓝色代表T+ΔT(即时间片向后推移ΔT)时刻的节点状态,绿色代表T+2ΔT(即时间片向后推移2ΔT)时刻的节点状态。此外,图中红色矢量箭头代表在不同时间片之间节点变量间的状态转移关系,黑色有向箭头代表同一时间片内节点变量间存在关联关系。
图9、图10中各个节点代表的事件及故障率、维修率如表1所示。
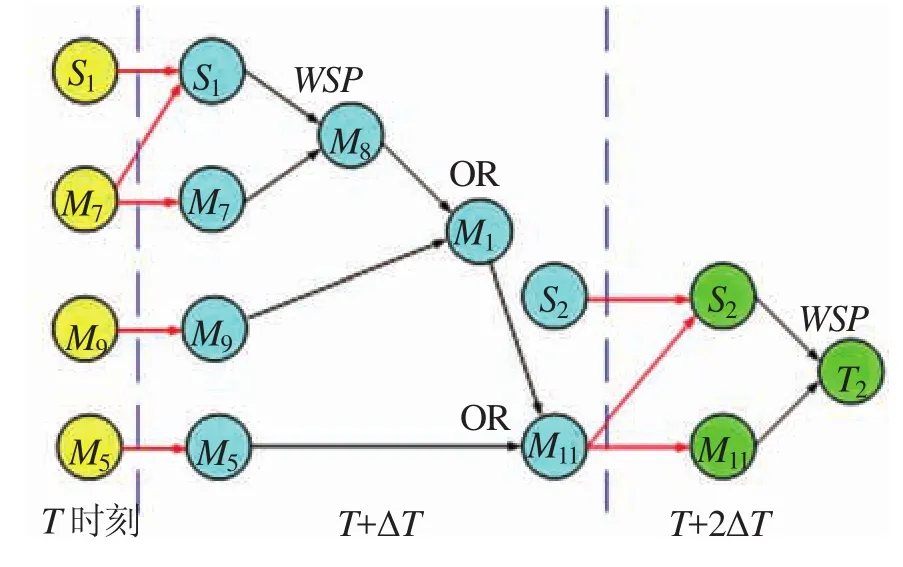
图9 电液系统动态贝叶斯网络模型

图10 调距桨装置总体动态贝叶斯网络模型

表1 各节点事件的故障率、维修率(h-1)
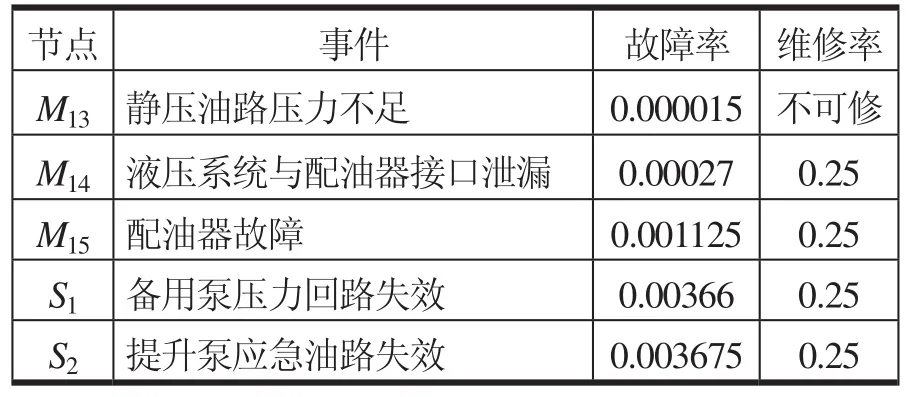
续表1
3 调距桨装置任务可靠度仿真与求解
仿真过程中,取单位时间片为1h(即ΔT=1h),仿真时长(任务时间)为232h,采用基于Matlab的BNT工具箱,在其算法和推理引擎的基础上,编写程序并输入表1所示的故障率和维修率,实现调距桨装置的动态贝叶斯网络仿真预测。电液系统故障概率随任务时长变化如图11、图12所示。得到系统总体任务可靠度随任务时长变化如图13所示,从图12中曲线可以看出,如果不计可修性的影响,在任务的前70h,电液系统故障概率上升较慢,而随后则以近似线性的速度上升。这是由于电液系统在组件和系统的两级结构上均存在一定量的冗余机制,这些冗余机制对于任务可靠度的下降存在着抑制作用,但抑制的效果则随着时间的推移而逐渐下降,最后进入稳定状态。
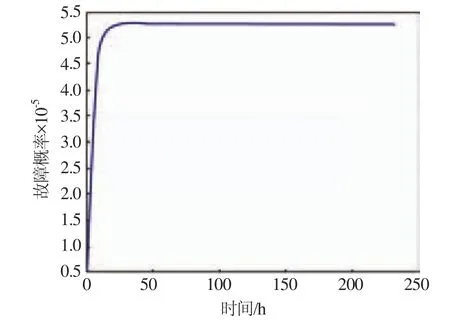
图11 可修复条件下电液系统故障概率曲线
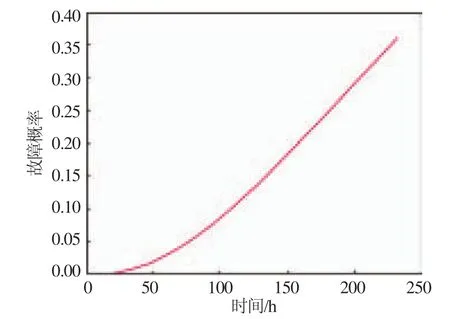
图12 不可修复条件下电液系统故障概率曲线

图13 可修复情况下总体任务可靠度曲线
从图11、图13中曲线可以看出,如果考虑可修性的影响,在任务的前20h,任务可靠度下降较快,这是因为,在任务前期,系统未进入稳定状态,系统整体的失效速度大于修复速度,在任务后期基本进入了稳定状态,电液系统的任务可靠度趋于常数,其任务可靠度对装置总体的影响微乎其微。而装置总体的任务可靠度在20h之后以近似线性的速度下降,说明可修复性对于任务可靠度的下降存在着抑制作用,但抑制的效果则随着时间的推移而逐渐增强,这也证明了装置的任务可靠性是由可靠性、维修性和保障性共同保证的。
4 故障原因分析
图14给出了电液系统、桨毂机构、配油器(包括双向锁止阀块和油缸)、轴内油管4个子系统故障所导致任务失效概率的计算结果。结果表明,桨毂机构和配油机构是导致任务失效的两个主要原因。且在任务前期(前20h),调距机构是最主要的任务失效原因,而后期则是桨毂机构和配油机构的综合影响,这与组成部件的维修能力相对较弱及难以进行冗余设计有关。
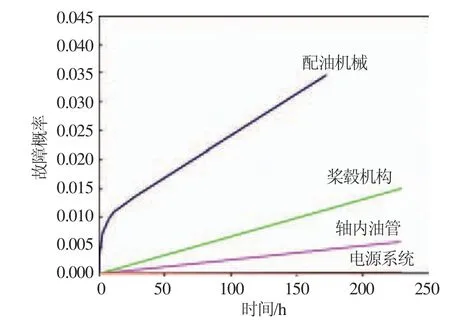
图14 各子系统导致任务失败概率随时间变化图
从图14还可以看出,电液系统由于其冗余设计和修复能力强,对装置总体任务可靠度的影响很小。
5 结语
1)将动态贝叶斯网络建模技术引入到调距桨装置系统的任务可靠性预测过程中,与模块化建模方法相结合。仿真结果表明,与传统的分析计算方法(如故障树方法)相比,该方法的优点为:(1)简化了预测过程,各种评价指标使用Matlab语言描述,并与贝叶斯网络工具箱结合,通过模型自动求解,避免了计算公式或求解方法的复杂手工推导过程。(2)在求解过程中,避免了动态故障树的状态组合爆炸问题,大幅度提高了计算效率。
2)通过对仿真结果的讨论,说明实际产品的可靠性设计不能单一局限于降低失效概率的设计,必须同步进行维修性设计和备件保障设计,也不能把可靠性、维修性和备件保障性各自单独进行设计,而应该进行综合设计,以达到优化设计的目标。
[1]Dugan J, Bavuso S, Boyd M. Dynamic fault tree models for fault tolerant computer systems [J]. IEEE Transactions on Reliability, 1992, 41(3): 363-377.
[2]Smidts C. Probabilistic dynamics:a comparison between continuous event trees and a discrete event tree model[J]. Reliability Engineering and System, 1994, 44: 65-97.
[3]Distefano S, Puliafito A. Dependability evaluat-ion with dynamic reliability block diagrams and dynamic fault trees[J]. IEEE Dependable and Secure Computing, 2009, V6: 4-17.
[4]Malsuoka T, Kobayashi M. GO-FLOW: A new reliability analysis methodology [J]. Nuclear Science and Engineering, 1988, 98: 64-78.
[5]Schoenig Raphael, Aubry Jean Francois, Camb Ois Thierry, et a1. An aggregation method of Markov graphs for the reliability analysis of hybrid systems [J]. Reliability engineering & System Safety, 2006, 9l(2): 137-148.
[6]Paolob, Jasonk, Manganla, et a1. Construction of event-tree/fault-tree models from a Markov approach to dynamic system reliability[J]. Reliability Engineering and System Safety, 2008, 93(11): 1616-1627.
[7]肖秦琨. 动态贝叶斯网络推理学习理论及应用 [M].北京: 国防工业出版社, 2007.
Mission Reliability Model and Application of Controllable Pitch Propeller Based on Dynamic Bayesian Networks
WANG Xiao-feng1, QI Heng2
(1. Shanghai Bureau, Navy Equipment Department, Shanghai 200083, China; 2. No.704 Research Institute, CSIC, Shanghai 200031, China)
In order to solve the dynamic and repairable problems of controllable pitch propeller (CPP) during the reliability analysis, a new method based on dynamic Bayesian network (DBN) is presented. Dynamic and repairable reliability modeling and analysis technique is presented. The defects of traditional dynamic analysis method on the describing model and the algorithms are made up. In terms of the model, the dynamic and repairable behavior of the system is described effectively by using Bayesian networks. On the basis of this, the mathematical model of mission reliability of the system is established. MATLAB computing statements are written by using Bayesian network toolbox in MATLAB software. Importing the failure rate and repair rate of the relevant components, numerical simulation of CPP’s mission reliability can be realized.
Bayesian networks; dynamic system; mission reliability; modeling
TP 183
A
王校锋(1979-),硕士研究生。主要从事机电设备设计与研究。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
上海质量(2019年8期)2019-11-16
环球慈善(2019年6期)2019-09-25
电子制作(2018年23期)2018-12-26
电子制作(2017年2期)2017-05-17
数理化解题研究(2017年4期)2017-05-04
铁道通信信号(2016年6期)2016-06-01
电子器件(2015年5期)2015-12-29
