船舶PID舵控制系统机理研究及典型故障排查
2013-10-17 10:17成若义丰少伟李军华
机电设备 2013年4期
成若义,丰少伟,李军华
● (海军工程大学,湖北武汉 430033)
船舶PID舵控制系统机理研究及典型故障排查
成若义,丰少伟,李军华
● (海军工程大学,湖北武汉 430033)
介绍了PID舵的主要控制方式,研究了控制系统工作机理、“自动”控制方式的工作原理,分析了PID舵控制系统的工作流程,列举了常见故障及排除方法。
船舶;PID舵;控制系统
0 引言
船舶舵机的主要功能是用来控制船舶的方向变化,保证船舶按指定航向作直线或曲线运动,是船舶安全航行的关键设备。正如汽车的方向盘于汽车的重要性,舵机在船舶辅助机械中的重要性不言而喻,必须保证其工作的可靠性[1]。
根据船舶自动舵的发展历史和控制方法的不同,可以大致分为4个发展阶段,即机械舵、PID舵、自适应舵和智能舵[2]。其中PID舵的出现满足了船舶对大型化、快速化的要求,目前仍被广泛使用于各种类型船舶上,后续两个发展阶段也是在 PID舵的基础上随着自适应控制理论和微处理机的发展而逐步出现的。本文通过对电动液压舵机PID控制系统的深入研究,对舵机PID控制系统的组成、工作方式及工作原理进行了深入分析,并列举了目前PID舵在实际使用中出现的典型故障及排除方法,并说明了该控制系统的优劣。希望能给船舶实际操作及维修人员提供帮助。
1 PID舵的用途及工作方式
1.1 用途
舵机工作的一般原理为:当给定转舵角时,控制系统的执行机构通过压力转换器、控制滑阀和主泵的调节器推动泵,将它转到给定的工作角度上。舵机控制系统是船舶航向控制系统的一部分,它能控制舵的转动且自动将船舶保持在给定的航向上。
1.2 工作方式
PID舵控制系统可以对1台或者2台舵机同时实施控制。
1.2.1 一台舵机的控制方式
通过控制系统的操纵台和程序给定器,可以保障舵机在以下几种方式下工作:1)“自动”——从导航系统或遥控附加装置实施遥控输入;2)“随动”——船舶机动时使用的工作方式;3)“程序”——通过设定的程序执行的操舵方式;4)“手动”——备用控制方式,直接从遥控台操纵舵机;5)“应急”——直接从执行机构进行的应急控制方式。
在1台舵机的控制方式中,可以是1台或2台主泵同时工作,也可以是1台主泵和1台备用泵同时工作。
1.2.2 两台舵机时的控制方式
通过控制系统的操纵台和程序给定器,可以保障舵机在以下几种方式下工作:1)“自动”——从导航系统或遥控附加装置实施遥控输入;2)“同步随动”——船舶机动时使用的工作方式;3)“分别随动”——船舶机动时使用的工作方式;4)“程序”——通过设定的程序执行的操舵方式;5)“手动”——备用控制方式,直接从遥控台操纵舵机;6)“应急”——直接从执行机构进行的应急控制方式。
在两台舵机的控制方式中,可以是2台主泵或者4台主泵同时工作,也可以是其中1台主泵和1台备用泵协同工作。应当注意的是:在以1)、4)方式实施控制时,只能实施同步控制,以5)方式实施控制时,只能实施分别控制。
无论是控制1台舵机还是2台舵机, 在控制系统的组成中如果没有加入程序给定器,则无法实施“程序”控制方式。
2 PID舵控制系统工作原理
2.2 自动控制船舶航向的原理
PID舵是一种比例—微分—积分舵,其控制系统按偏差原理设计,根据船舶航向偏离角υ,偏离角的微分ύ和偏离角的积分来实施控制。可以将控制状态写成下列形式:

式中:β为转舵角;k为反馈系数,正比于船舶航向偏离角与转舵角的比值;k1、k2分别为微分通道和积分通道的传输系数(取决于放大器输出端上的信号与输入端上的信号比)。
PID舵控制系统电路见图1。
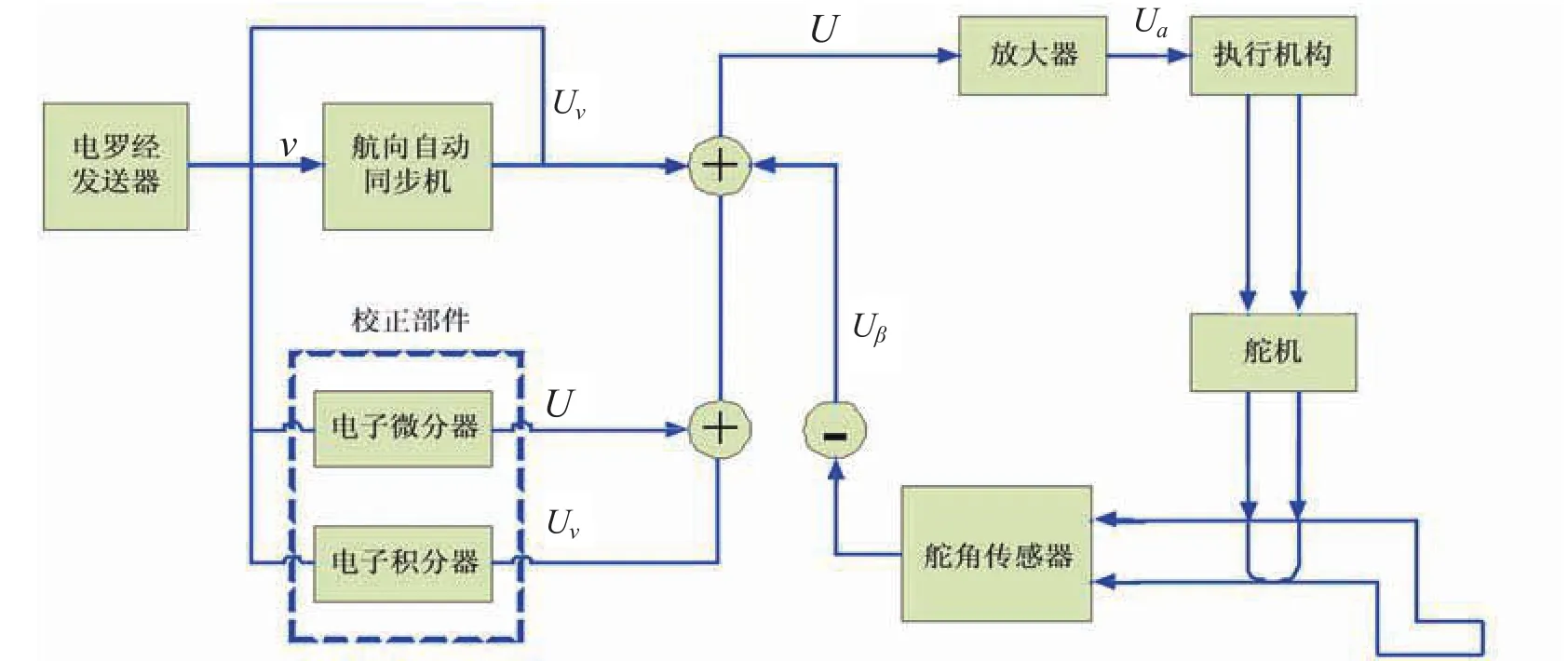
图1 PID舵控制系统电路设计图
当船舶偏离给定航向时,在加法元件的输入端上产生正比于下列3个参数的电压:

放大的电压总和到达执行机构,执行机构根据指令控制舵机实施转舵,控制船舶按照给定的航向行驶。转舵的同时,正比于转舵角的反馈信号到达加法元件。反馈信号为:
反馈信号 Uβ一直位于主控制信号电压的相反相位中。因此,在船舶偏离航向的过程中,到达放大器输入端的总和电压U等于Uυ+Uύ+UU-Uβ,电压UU的符号不取决于每一特定时刻偏离的方向,而取决于不对称偏航特性。如果由于某种干扰船舶开始偏航,且船舶的角速度在增大,则电压Uύ也在增大,需要加大转舵角。当船舶在转舵的影响下,开始回到给定航向上时,微分信号Uύ的相位改变,而信号Uv则减小。
为了提高系统的可靠性,在控制1台舵机的系统中设有两个独立的通道,而在控制两台舵机的系统中设有4台独立的通道,其中每一个通道都控制着自己的泵。
2.2 “自动”控制方式的工作原理
控制系统电路结构图见图2。
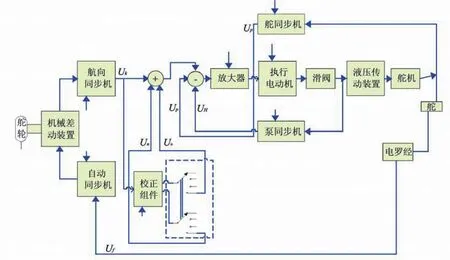
图2 控制系统电路结构图
“自动”控制方式是船舶常用的控制方式,在船舶长时间航行时使用。当设定控制方式转换开关在“自动”位置时,控制台上的自动同步接收机连接到电罗经的同步发送器。当船舶偏离指定的航向时,来自电罗经发送器的信号使自动同步接收机的转子转动到与船舶偏航值成正比的角度。自动同步接收机通过机械差动装置转动航向同步发送器的转子,从航向同步发送器来的电压Uk到达放大器和校正组件的输入端。从校正部件的输出端到达放大器输入端的电压为Un和Uu的信号和。其中从校正部件电子微分器输出端来的电压Un正比于船舶偏离给定航向的角速度;从电子积分器输出端来的电压Uu正比于船舶偏离给定航向角的积分。放大了一定幅值和相位的电压从放大器到达执行电动机的控制绕组,执行机构的电机开始旋转并移动滑阀装置,滑阀装置使舵机的电动液压传动装置动作,舵机开始转舵。与此同时,舵传感器中的自动同步发送器的转子也转动一正比于转舵角的角度,泵同步机绕组上的电压UH与舵同步机绕组上的电压UP相位相符,但是与电压Uk、Un和Uu的相位相反,在接下来的转舵里,信号的电压值将会增大,在放大器的输入端会出现合成的最终电压,该电压的相位引起执行电机和同步机的转子向相反方向转动。泵的控制机构开始向零位返回。当泵的控制机构返回到零位时,电压UH的值将等于零,而电压UK、UN与UU的值将得到电压UP值的补偿,舵将转动一定角度,转舵角将与船舶偏离指定航向的角度和船舶偏离航向的角度的积分成比例。在舵的作用下,船舶开始恢复航向,向相反方向转动的电罗经的同步发送器,改变航向同步发送器的转子的旋转。到达放大器的失调的电压改变符号。放大的反相信号的电压到达执行电机的控制绕组。电机与执行机构的同步发送器的转子改变旋转方向。作用于泵控制机构的电机使舵机的液压传动装置运转,舵机开始向中线面相反的方向转舵;同时,通过舵杆,使舵同步发送器的转子返回零位。当船舶返回到指定航向时,航向同步发送器的转子占据零位,而舵在导数信号的作用下,将向中线面相反方向转一定角度;当接近指定航向时,实现限制船舶的作用。
需要注意的是:1)与船舶偏离航向速度成比例的电压UN用于在航向上调制船舶,预防船舶指定航向的起伏。2)与船舶偏离指定航向值的积分成比例的电压UU用于在外部干扰力(水流、螺旋桨转数的差异;船舶外壳相对下中线面的不对称等等)对船舶长期单方面的影响情况下,自动修正船舶与指定航向的偏差。3)在不同的航行条件下,同样的船舶偏航角需要不同的转舵角度值来保证船舶返回到指定的航向。航向变化值φ与转舵值β的比叫做反馈系数。

借助控制台上的“k设定”开关,通过改变舵传感器里舵同步发送器的激励绕组的电压,该电压来自控制台的自动变压器,实现k值的变化。
3 PID舵控制系统常见故障及排除方法
PID舵控制系统常见故障及排除方法见表1。

表1 PID舵控制系统常见故障及排除方法
4 结束语
PID舵目前被广泛使用于各型船舶中,技术相对成熟,其性能指标能满足大、中、小各型船舶的使用要求,具有非常广阔的使用空间,掌握控制系统的工作原理及常见故障对实际使用是非常有帮助的,希望通过本文能给相关行业工作者一点启发。
[1]施春红. 船舶电气设备及自动控制[M]. 哈尔滨:哈尔滨工程大学出版社, 2002.
[2]张礼华. 船舶舵机个体Agent的研究与构建[J]. 上海:中国航海, 2004.
Study on Mechanism and Typical Troubleshooting of PID Rudder Control System for Ship
CHENG Ruo-yi, FENG Shao-wei, LI Jun-hua
(Naval University of Engineering, Wuhan 430033, China)
The main control modes of PID rudder are introduced. The working mechanism of the control system and the principle of the "automatic" control mode are studied. The workflow of PID rudder control system is analyzed. The common malfunctions and troubleshooting are enumerated.
shipping; PID rudder; control system
U665.13
A
成若义(1980-),男,学士。研究方向:船舶动力工程。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
铁路通信信号工程技术(2021年6期)2021-07-05
自动化学报(2019年6期)2019-07-23
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年1期)2018-04-04
传感器世界(2017年4期)2017-03-23
制造业自动化(2017年2期)2017-03-20
电子制作(2017年24期)2017-02-02
舰船科学技术(2015年8期)2015-02-27