桌面型触感交互装置的构建与控制
2013-10-14 11:00:20王珺宋文忠帅双辉
机械制造与自动化 2013年3期
王珺,宋文忠,帅双辉
(1.金陵科技学院机电学院,江苏南京211169;2.第二炮兵驻柳州地区军代室,广西柳州545012;3.第二炮兵驻1002厂军代室,江苏南京 210013)
0 引言
灵巧型触感交互装置无论在理论上,还是在工程上都有着重要的作用,对它的研究,显得十分迫切。灵巧型触感交互装置从结构上分为穿戴型和桌面型,这两种类型各有优缺点。穿戴型触感交互装置具有符合人手结构的支撑骨架,外形与人手相似,像一个手套,使用时佩戴在手背上,它的优点是可以直观的进行物体的抓取等操作,但是需要操作者承担装置自身的质量,且无法感知抓持对象的质量以及抓取时的反馈力。桌面型触感交互装置则解决了这一问题,通常放置在桌面上,或是有独立的支撑机构,传感器有较大的放置空间,在结构上不受人手的限制。但工作空间有限,难以灵活操作,往往随着自由度的增加而变的庞大和复杂。
为了实现灵巧型触感交互装置的运动位姿测量和力触觉反馈这两大主要功能,结合穿戴型主手和桌面型主手的各自的特点,本文构建了一种桌面型触感交互装置,该装置体积小,结构紧凑,具有和人手相似的结构,控制方便,在进行触碰或者抓握物体时能够感受到反馈力。
1 桌面型触感交互装置的构建
针对桌面型和穿戴型这两种结构的主操作手的特点进行优化,设计出一种桌面型触感交互装置,使其既具备力反馈功能,又有比较紧凑的结构空间。该装置一共有5个手指,有着与人手相同的结构,便于操纵和控制。在Pro/E软件中对触感交互装置进行结构设计,在设计时应该注意的条件是,在达到触感交互装置的性能要求的前提下,其结构需要尽量满足控制简便、安全可靠、经济合理、外形美观等要求,并且尽量减小体积,减轻质量,提高效率。最终确定的装置的外形如图1所示。桌面型触感交互装置的机械本体尺寸为:总长 193.8mm,总宽215.83 mm,总高88 mm。

图1 鼠标形桌面主操作手的机械模型
触感交互装置采用了桌面型结构,使用触感交互装置操作时,与平时使用鼠标相似,整个手掌覆盖在装置上,进行抓握和触摸等活动。该触感交互装置共有15个自由度,能够实现简单的抓取和感知物体表面材质的功能。装置有力反馈结构,在抓取物体过程中能够将反作用力的大小反馈给操作者,一般作为从手的灵巧手,每个手指的承载能力最大为4 N,相应地,本装置也能够提供4 N的反馈力。在触感交互装置上安装有旋转电位计,可以测量操作者手指的各个关节在运动时转过的角度,实时的把手指的位置姿态信息传达给从手。
综上所述,本文设计出的桌面型触感交互装置具有以下特点:
1)本装置有着类似鼠标的结构外形,在工作时,符合现代人的操作习惯,使用舒适轻便;桌面型的结构使得操作者无需承担装置的自重,在采用电动机等驱动装置进行力反馈驱动或进行其他功能扩展时,不会因为装置质量的增加而影响操作者手指的正常运动。
2)设计的桌面型触感交互装置具有创新性,是由结构独立的5个手指以及连接组件构成的,布局与人手相似,操作方便。仿人手的5个手指的结构,简化了触感交互装置和从手间的映射关系。
3)人手在运动时,通过本装置可以采集到5个手指的各自的4个自由度,可以实现将操作者的手指的位置姿态准确的传递给从手灵巧手。本装置具有力反馈系统,增强了操作者在使用触感交互装置的沉浸感。力反馈和位置反馈结构简单,容易实现实时控制。
为了验证触感交互装置的功能特性,在工程软件造型的基础上,同时进行物理样机的制作。一般用于结构制作的材料选择金属材料,为了满足足够的强度和刚度的要求,主要材料可以选用各种碳钢和铝合金[1]。由于桌面型触感交互装置负载小,要求其自重轻,对寿命的要求不高,因此选择铝合金作为主要的加工材料,可以使触感交互装置的整体质量保证在一个合理的范围内,并且可以降低制作成本。
2 桌面型触感交互装置的传感和驱动系统
2.1 位置传感器
根据桌面型触感交互装置的具体结构,为了将操作者的手指的位置姿态信息准确传递给从手灵巧手,需要测量转轴转动的角度,因此需要用到角位移传感器。
在桌面型触感交互装置中,具体选用的是村田制作所的SV01A型旋转位置传感器。因为触感交互装置上的传感器是安装在位于两支架间的转轴和指尖结构的横向滚轮和竖向滚轮处,指尖结构处的用于固定两滚轮的定位壁尺寸很小,为11 mm×12 mm,因此要求选用的传感器体积尽量小。SV01A型旋转位置传感器结构紧凑,体积小,测量精度高,安装方便。传感器的高度为12 mm,宽11 mm,厚度仅有2.1 mm,其外形如图2所示。
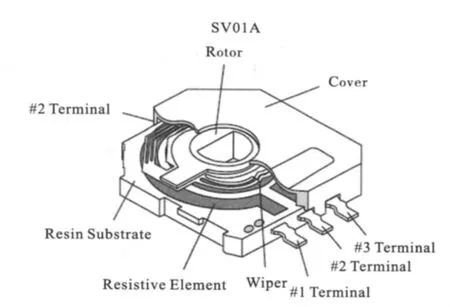
图2 SV01A型旋转位置传感器
该传感器使用方便,不需要搭建特殊的测量电路来将电阻的变化转化成电信号,可以直接对传感器的输出引脚的信号进行检测和分析。图中引脚1为地,引脚3为电源输入,引脚2是输出。
SV01A型旋转位置传感器非常薄,厚度仅为2.1 mm。使用寿命长,这是因为使用了优良的电阻材料和高可靠性的滑动片,有效转角为333.3°,有1 M的旋转寿命。测量的角位移和输出电压在一定范围内有高度的线性关系,如图3所示。在电压比率为50%处,顺时针逆时针旋转160°,在这一范围内,能够保证输出的线性。

图3 SV01A型传感器输出线性保证范围
2.2 译码电路
本文采用由Tekscan公司生产的挠性压力传感器Flexiforce Sensor进行力的测试。该传感器属于薄片式传感器,外形如图4所示。Flexiforce传感器本身非常薄,柔韧性强,具有可挠性,能够测量几乎所有接触面之间的压力,线性好,滞后性小,漂移小,在温度灵敏度方面也具有十分优良的特性。

图4 挠性压力传感器外观
Flexiforce Sensor属于压阻效应的应变式测力传感器,在传感器的前端大约直径为9 mm左右的圆形区域,是其测力的感测区域。在没有负载的情况下,电阻值非常大(约20 MΩ)。随着负载的增加,电阻值开始下降。末端输出的三只插脚则可适用于一般的面包板或三孔插座使用。根据不同负载时产生的电阻变化,配合使用如图5所示的电路,转换成电压变化。

图5 应变式测力传感器转换电路
在无负载情况下输出为0 V,在0.4 kg/g时,输出为2.25 V,输出电压与负载呈现高度的线性关系。经过试验,得到电压-负载关系图如图6所示。

图6 应变式测力传感器电压-负载关系图
2.3 驱动系统
驱动技术是机器人的动力源,它决定着机器人的整体的运行性能[2]。无论哪类伺服机构,用于机器人的驱动装置,有着如下要求:效率高,输出功率大,体积小,质量轻;运行平稳,尽量不产生冲击或抖动;滞后小,反应速度快,控制灵活,惯量小,位移偏差和速度偏差小;可靠安全,操作和维护简单;对环境污染小,噪声小,以及成本低廉;应能够与光电码盘、测速机和制动机构等组装成一体,使用方便。
本文设计的桌面型触感交互装置采用电驱动方式进行驱动。考虑来自从手灵巧手的反馈力最大为4 N,而且在触感交互装置的装置中有限位轴可以保护操作者的使用安全,感受指尖正压力的力反馈系统采用主动式力反馈结构,主动式力反馈结构对力的灵活控制成为选用该结构的理由,这里选用电动机作为驱动器。在感受材质表面粗糙程度的指尖机构,则采用被动式力反馈结构的电磁铁作为驱动器。
3 桌面型触感交互装置的控制系统
控制系统相当于机器人的大脑,是机器人的神经中枢。机器人的控制算法和运动策略正是通过控制系统才得以实现的,控制系统对各种信息进行综合处理,协调各个检测部件和执行部件的运行。在整个控制系统中,控制系统处于核心位置,其工作性能的好坏决定了机器人的性能[3]。桌面型触感交互装置的控制系统主要实现以下两大功能:实现对操作者手指的位置姿态信息的采集与处理;实现对驱动器的有效控制,将从手灵巧手与环境作用产生的力信息反馈给操作者。
桌面型触感交互装置的控制系统主要分为以下几个部分:控制器开发板电路,直流电动机控制电路,DA转换电路,采样电路,力传感器的辅助电路。其中,控制器开发板直接220 V的交流电源;直流电动机接30 V的直流电源,直流电动机驱动电路接±9 V直流电源;采样电路和DA转换电路需要5 V直流电源,力触感器的辅助电路接±9 V直流电源。根据这些电路的需求,仿真器和直流电机的电源另外考虑,其余电路统一使用±9 V的直流,并通过三端稳压块7809,7909,7805来实现,,电源电路如图7所示。

图7 主操作手的电源电路
在设计中要求直流电动机将灵巧手感受到的力的大小转变为扭矩输出,反馈给操作者。而直流电动机的扭矩与电流有非常好的线性关系,所以对直流伺服电机的控制就可以采用恒流源电路,如图8所示。

图8 恒流源电路
为了验证该电路对直流电动机的控制效果,在触感交互装置的折形摆杆的前端用测力传感器代替圆球,操作者的指尖由放在圆球上改为放在力传感器前端的圆形区域。DSP发指令使恒流源的输入电压Vin从03 V之间变化,带动电动机旋转,操作者保持折形摆杆的前端处于初始的水平位置,此时力传感器会测出指尖的力。图为恒流源的输入电压Vin与力传感器的输出电压之间的关系。从图中可以看出,使用该恒流源电路作为直流电动机的驱动电路,可以满足桌面型触感交互装置的要求。

图9 力反馈实验数据
4 结语
对桌面型触感交互装置的设计和制作的过程,是一个将机械、电子、传感技术、驱动技术,以及电路搭建等方面的知识进行整合,加深认识的过程。灵巧手触感交互装置的开发是一个循序渐进的过程,需要大量的时间和人力不断进行试验和改进。所研制的桌面型触感交互装置样机,其性能虽然基本达到了预期的效果,但是尚有许多地方需要进一步完善。当然,本文中的触感交互装置只是一个实验样机,若要使之能够适应工业机器人的要求,具有较好的稳定性和抗干扰能力,还需要解决众多的实际问题。
[1]戈登·麦库姆.机器人本体制作指南[M].北京:机械工业出版社,2006:25-54.
[2]龚振邦.机器人机械设计[M].北京:电子工业出版社,1995:30-59.
[3]刘杰,张玉茹,刘博.人手到灵巧手的运动映射实现[J].机器人,2003,25(5):444-451.
猜你喜欢
小资CHIC!ELEGANCE(2021年40期)2021-11-08 18:54:03
发明与创新(2021年17期)2021-07-05 15:32:36
重型机械(2019年3期)2019-08-27 00:58:48
无线互联科技(2018年20期)2018-12-27 11:36:00
测控技术(2018年5期)2018-12-09 09:04:28
电子制作(2018年9期)2018-08-04 03:31:12
温州医科大学学报(2016年9期)2016-10-31 07:47:26
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:55
中国工程咨询(2016年2期)2016-02-14 07:26:10
Coco薇(2015年12期)2015-12-10 02:53:59