水下微地貌三维激光地形仪研制
2013-10-13 08:15:16丁忠军李玉伟徐松森李珊珊
海洋工程 2013年1期
丁忠军,李玉伟,徐松森,李珊珊
(1.青岛科技大学自动化学院,山东青岛 266061;2.国家深海基地管理中心,山东 青岛 266061;3.中石化胜利石油管理局钻井工艺研究院,山东东营 257017;4.青岛远海海上测控科技有限公司,山东青岛266061)
跨越江海的公路特大桥、海洋采油平台、深水防波堤、大型港口的建设[1]必然对建筑物周围的地形产生较大的影响,原有平衡遭到破坏,发生泥沙冲淤以建立新的平衡,而泥沙冲淤问题可能会给工程带来整体性破坏,危害极大。因此,进行滩海工程物理模拟实验,研究泥沙冲淤[2]引起的地貌变化,高精度获取水下地形是一项必不可少的重要工作。
目前,地形测量的主要方法有:光电式测量、电阻式测量、超声测量。光电式测量是根据水和淤积体在分界处两者透光差异来判别触头接触区域的位置,从而得到淤积面的高程,绘出地形图。而此法是利用界面淤积物的阻光作用来实现地形测量的,因此它会破坏局部地形,从而影响测量精度。电阻式地形仪是利用水中和淤积物中电阻的差异来确定模型中冲淤面高程的。该方法灵敏度较高,其缺点是抗干扰能力差,易产生误动作,稳定性不高,不适合长时间连续测量。超声测量是根据回声定位原理制成的,根据声脉冲发出到接收的传播时间计算高程描绘地形。但受实验环境影响,声波在水中产生反射、散射和衰减,使得测量仪器的分辨率不高,精度难以达到实验要求。
激光是现代新光源,具有方向性好、颜色极纯、亮度高、相干性好等特点。用其研制的激光测距传感器因其脉冲频率高、光波波长很短等原因而达到很高的测量精度。被广泛应用于大地测距、宇宙大地测量、航空摄影、三维扫描等多个领域[3]。利用光学三角漫反射法研制的传感器结合光学技术及激光技术特点,通过测量漫反射光在成像物镜的偏移获得目标距离,因长距离测距成像困难而很少被应用,但在短距测量中却具有很高精度,如平整度测量、非接触测量位移、三维尺寸、厚度、物体形变、振动、分拣及玻璃表面测量等高精度短距测量领域获得了大量应用。
激光应用于水下地形测量的实例较多,如黄河河床模型实验借助CCD摄像机的激光三维扫描系统、上海交大的水下地形激光自动测量系统等,但通常使用激光测距原理,通过测定光在空气及水中的运动时间而得到目标距离。基于光学三角漫反射原理研制的激光测距传感器并将传感器直接置于水中测量高程,即能获取高精度测量数据,同时克服水面波动影响,具有潜在的工程应用价值。
本项目实现地形自动扫描测量、定点测量、小区域扫描、三维显示等功能,集高精度运动控制、数据采集、地形三维显示于一体,具有一定的开创性研究。项目主要融合三角反射激光测距技术、二维扫描技术、虚拟仪器技术。这些技术的有机融合,使系统更加完善,精度更高,实现了地貌的高精度获取。
1 激光三角反射原理
在激光三角法[4]中,由光源发出的一束激光照射在待测物体平面上,通过反射最后在检测器上成像[5]。当物体表面的位置发生改变时,其所成的像在检测器上也发生相应的位移。通过像移和实际位移之间的关系式,真实的物体位移可以由对像移的检测和计算得到。激光三角法的框图[6]如图1所示。其中:α是投影光轴与成像物镜光轴的夹角;β是光电探测器受光面与成像物镜光轴的夹角,而s和s'分别是物距和像距,d是传感器上的成像点的偏移,而δ为实际物体表面的偏移。系统的相关参数为:偏置距离(stand-off distance)D为从传感器到被测表面参考点的距离;测量范围(measurement range)为最大能检测到的物体表面的偏移,即︱δ︱的最大值;测量精度,传感器的最小测量单位;分辨率(resolution)一般指测量的纵向分辨率(vertical resolution),为测量精度和测量范围之比;横向分辨率(horizontal resolution)为待测物体表面上所取测量点的最小间距。
为了实现完美聚焦,光路设计必须满足斯凯普夫拉格条件(scheimpflug condit ion);成像面、物面和透镜主面必须相交于同一直线,如图1中X点所示。系统的非线性的输入输出函数为:

又可以写为:


激光三角法的另一项重要参数为线性度(Linearity),就是三角测量法输入和输出关系的线性近似程度。可以证明,在三角测量中,可以通过缩小测量范围[7],增大接收透镜的共轭矩,增大三角测量系统的角度,缩小接收透镜的放大倍率,达到线性测量的结果。此外,由式(1)对d求导,得到输入输出曲线的斜率,即激光三角法的放大倍率σ:

系统的放大倍率[8]决定了系统的分辨率,而放大倍率不但取决于系统参数,还是像移d的函数。
2 地形仪的组成
如图2所示,水下微地貌三维激光地形仪由机械系统、二维运动测控系统以及测控软件组成。系统可以在1.5×0.5扫描范围内按照1~10 mm范围步长运行。其工作过程:硬件上电初始化,下位机控制器等待上位机测控软件发送控制指令及扫描参数,分别控制两台伺服电机带动丝杠旋转,丝杠与探杆连接,固定在探杆上的激光传感器侵入水面,通过丝杠传动扫描被测区域,并按运行步长测取高程数据。整个运行过程,通过测控软件可实时观测三维地形图,区域测量结束后停止电机。

图1 激光三角法的原理框图Fig.1 Functional block diagram of laser triangulation
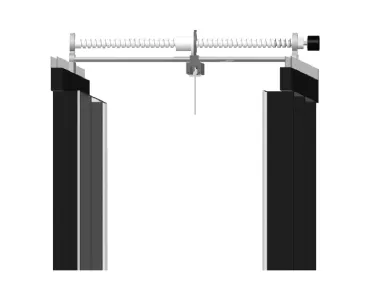
图2 三维激光地形仪示意Fig.2 Three-dimensional terrain apparatus based on laser testing arm
2.1 机械系统
地形仪机械系统主要由横向电机测量轨道、纵向电机测量轨道、探杆、侧桥、支架五部分组成。其中,横向电机测量轨道包括:两条固定杠、丝杠[9]、传动托台、伺服电机等。纵向电机测量轨道包括:两条固定杠、丝杠、固定板、传动托台、伺服电机等。仪器的主要设计结构:横向电机测量轨道与侧桥固定在支架上,侧桥用于安装伺服驱动器。纵向电机测量轨道通过固定板固定在横向电机测量轨道的传动托台上,探杆固定在纵向电机测量轨道的传动托台上。当横向电机带动丝杠旋转[10],固定于传动托台上的纵向电机测量轨道沿横向移动,当纵向电机带动丝杠旋转,固定于传动托台上的探杆沿纵向移动,由此构成二维运动控制系统,实现区域扫描全覆盖。
2.2 测控系统
测控系统包括传感器测量系统和电机伺服控制系统[11]。传感器测量系统包括防水护罩、激光传感器。电机伺服控制系统包括1台伺服电机控制器、2台伺服电机驱动器及2台伺服电机。
激光传感器选用真尚有品牌ZLDS10X系列激光位移传感器,数字化集成一体化结构,0.1%高精度,量程为0~120 mm以及8 kHZ高响应、IP67高防护等级,测量不受色彩、表面材质或离散光线所影响,有同步输入端,可使多个传感器同步工作。电机伺服系统选用AC伺服系统MCXB系列驱动器及配套的伺服电机。
2.3 监控软件
LabVIEW是一种业界领先的工业标准图形编程工具,用于开发测试、测量与控制系统具有其他文本语言无法比拟的优势。此地形仪监控软件的编写使用虚拟仪器软件labview8.6编写,如图3所示,测控软件包括测量环境参数输入、运动方式控制、数据自动采集、实时三维地形显示、地形图处理等功能。其中运动方式控制主要包含:全区域扫描测量、小区域高精度扫描测量、全区域定点控制、电机运动控制等功能。

图3 测控软件主流程示意Fig.3 The lord flowchart of measurement and control software
对地形仪的测控软件进行操作,选择串口及输入环境参数,根据需要选取二维运动系统运动方式、全区域定点控制、小区域高精度控制等功能,此时二维运动控制系统按要求运动并以步长为最小单位发送激光传感器坐标,测控软件根据坐标自动获取高程数据,数据处理、计算等操作均由软件在后台通过数据处理控件完成,并绘制显示三维地形图。运行结束后可对地形图进行等高线绘制、剖面图显示、地形图拼接等处理。
3 水下测量误差分析及校正
激光具有单色性和高亮度性的特性,通过对激光的接收调制换算出测量距离,因此激光测量精度较高[12]。正因如此,国内外广泛应用于距离测量和军事探测。然而在滩海模型实验中却很少人应用。目前,激光测距传感器在工业测量中精度高达0.1 mm级,测量距离有限。鉴于激光测距的高精度性而滩海冲淤地形测量中量程不大等情况,将基于光学三角反射原理研制的激光传感器引进到滩海模型实验水下地形测量中,以提供一种新的水下地形测量方法,并验证其可行性。
激光三角法测量原理是对激光束在被测物体表面形成光斑的散射光进行感知[13],当光线由一种介质进入另一种介质时,光线必然发生折射,使光路发生弯曲,则光斑在检测器上的成像出现偏移,造成测量误差。结合系统设计,传感器经过防水处理浸入水中,光斑点光线在传播过程中,经过水中进入空气,发生折射,通过透镜在检测器上成像。根据光线沿直线传播原理,成像对应的理论光斑点为o点,如图4所示。则系统因传播环境不同引入测量误差。
通过透镜成像公式及几何三角学推导系统的非线性的输入输出函数为:

式中:a=lsinγ,φ=lcosγ为三角测量系统的固定参数,n为水的折射率。
基于三角反射原理研制的激光传感器测量范围小于测量盲区值,且激光发射口与接收口间距非常小,即在三角测量中,物体偏移很小,且盲区很大。故可以结合实际情况对式(5)做近似线性化处理,从而得出线性公式:

根据理论分析,现通过物理模型实验来测定激光水下地形测量的可行性、稳定性以及校正系数。验证试验方案示意图如图5所示,将激光传感器放入防水玻璃罩内,与钢尺固定,然后放入水中。调节钢尺旋钮,使激光传感器每次移动1 cm,读取激光传感器测量数据。试验数据如表1所示。

图4 误差分析示意Fig.4 Error analysis diagram

图5 激光位移传感器性能试验示意Fig.5 Laser displacement sensor performance test schemes
分析实验数据,系统具有良好的线性关系,在式(1)、(6)基础上拟采用校正系数进行校正,公式如下:


表1 验证实验数据Tab.1 Validation experiment data
校正算法采用曲线拟合的最小二乘法,求一函数s*(x),使误差平方和最小。设函数为:

通过表1数据求得的校正系数:

传感器测量范围为0~120 mm,则通过系统校正后,系统高程测量范围为204.85~364.21 mm。系统测量精度为0.2%FS。
根据精密测量要求,取置信水平0.997 3,标准差置信区域为(0.13,1.29),相对误差0.156%,系统经校正后,满足上述精度要求,且测量稳定性很好。
4 系统的实验应用
现用该系统测量水下模型,以验证系统的动态测量,测量结果如图6所示。测试结果表明,系统运行稳定、高精度、测量迅速、三维地形图直观形象,且图像处理能力强。
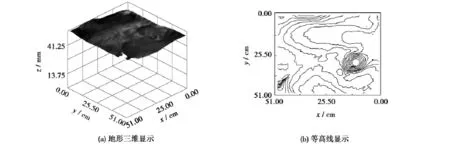
图6 测量结果Fig.6 Measurement results
5 结语
将激光三角测量原理引入滩海模型实验水下地形测量中,并结合二维运动控制技术及虚拟仪器技术,研制了三维激光地形仪。通过分析激光三角测量原理,分析误差引入原因及校正方法,整个系统与采用传统测量技术的地形测量仪相比,具有高精度,高稳定性,结构简单,维护方便等特点,适合实验室内地形变化实验,值得推广应用。
[1] 蔡守允,周益人,谢 瑞,等.河流海岸模型测试技术[M].北京:海洋出版社,2004.
[2] 刘树东,田俊峰.水下地形测量技术发展述评[J].水运工程,2008,411(1):11-15.
[3] 杨耀权,施 仁.激光扫描三角法大型曲面测量中影响参数分析[J].西安交通大学学报,1999(7):15-18.
[4] Demkin V N,Stepanov V A.Laser methods and facilities for monitoring the geometric dimensions of components[J].Measurement Techniques,2008,51(2):158-162.
[5] Demkin V N,Stepanov V A.Measurement of surface roughness profile by a triangulation method[J].Measurement Techniques,2008,51(6):614-617.
[6] 王晓嘉,高 隽,王 磊.激光三角法综述[J].仪器仪表学报,2004,25(4):601-604.
[7] 余祖俊.三维激光扫描测量系统标定方法研究[J].电子测量与仪器学报,2007,6(21):31-35.
[8] Bostjan Perdan,Drago Bracun.Online assessment of power transmission belt geometry by using laser triangulation and profile parameterisation[J].The International Journal of Advanced Manufacturing Technology,2010,49(1):177-184.
[9] 杨更更,叶佩青,杨开明.数控机床丝杠传动误差正反双向补偿功能的实现[J].组合机床与自动化加工技术,2002,6:4-5,34.
[10]郑子文,李圣怡.滚珠丝杠传动机构的微动特性及轨迹跟踪控制[J].光学精密工程,2001,9(4):360-362.
[11] Overmars A H,Toncich D J.Application of DSP technology to closed-position-loop servo drive systems[J].The International Journal of Advanced Manufacturing Technology,1996,11(1):27-33.
[12]钱晓凡,吕晓旭.提高激光三角法测量精度的新方法[J].激光杂志,2000,21(3):54-55.
[13]吴剑锋,王 文,陈子辰.激光三角法测量误差分析与精度提高研究[J].机电工程,2003,20(5):89-91.
猜你喜欢
制造技术与机床(2019年11期)2019-12-04 05:50:26
电子测试(2018年22期)2018-12-19 05:12:58
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
山东工业技术(2016年15期)2016-12-01 05:31:42
光学精密工程(2016年3期)2016-11-07 09:03:34
太空探索(2016年12期)2016-07-18 11:13:43
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
电子设计工程(2015年3期)2015-02-27 12:03:58