
空间反射镜组件Bipod柔性元件卸载能力分析
2013-10-11 05:52:40马尧
航天返回与遥感 2013年3期
马尧
(西北工业大学航空学院,西安 710072)
1 引言
空间遥感器在对地观测、深空探测以及科学试验等领域发挥着重要作用。作为一个关键的元件,主反射镜的性能在光机系统设计中占据着重要地位。随着需求特别是像元分辨率的提高,反射镜的口径已经超过 1m,这就使得反射镜支撑的设计、制造及装配变得困难[1-3]。大口径反射镜技术一个重要的发展趋势就是从刚度设计到柔性设计甚至是无结构设计[4]。在柔性结构设计方面,Bipod类型的柔性元件在众多空间任务中有着广泛应用。
本文将在前人工作基础上对Bipod柔性元件的分类进行总结改进,说明Bipod类型柔性元件的多样性,通过引入相对刚度比和相对位移比的概念,对柔性元件的卸载能力进行分析,证明柔性元件对温度变化以及制造装配误差的卸载能力很大程度上取决于柔性元件的准静定程度。
2 Bipod柔性元件的准静定特性及多样性
静定方法是机械设计上一个古老并且有效的法则,在很多领域有着广泛应用[5]。静定的优点就在于作用在物体上的力是明确的,并且来自周围环境以外的力矩不会对物体产生不良影响。这些特点有利于反射镜支撑结构隔离温度变化和制造装配误差的影响。有很多方式可以实现静定支撑[6]。对于一个空间三维物体来说至少需要3个点。文献[6]总结了3种不同的三点约束布局,如图1所示,包括一种3-2-1布局以及两种2-2-2布局。3-2-1布局分别限制3个点的3个、2个以及1个平动自由度。而2-2-2布局的每个点都限制了2个平动自由度。对于圆形反射镜,图1(b)中的2-2-2(I)是一个典型的应用,它约束了3个轴向和3个切向自由度,本文将采用这个形式。
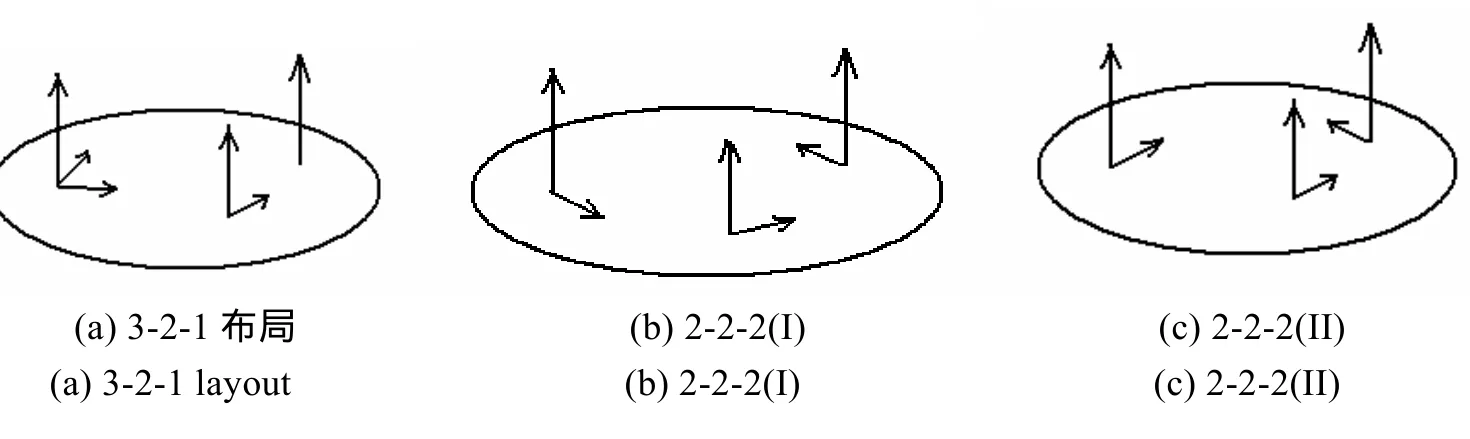
图1 三点支撑类型的3种自由度分配方式Fig. 1 Constraint allocation for three kinds of mount configuration
实现上述准静定支撑需要使用不同的柔性元件,其中Bipod作为一个重要的二自由度柔性元件在空间反射镜支撑结构上具有广泛应用[7-10],迄今为止已发射最大口径的反射镜是 Herschel项目的主镜,其是一个口径为3.5m的SiC反射镜,如图2所示,具有3个钛合金的Bipod柔性支撑。对Bipod柔性元件分类进行的改进见表1,这可以使设计者在确定Bipod方案时有一个更清楚的全局轮廓[11]。
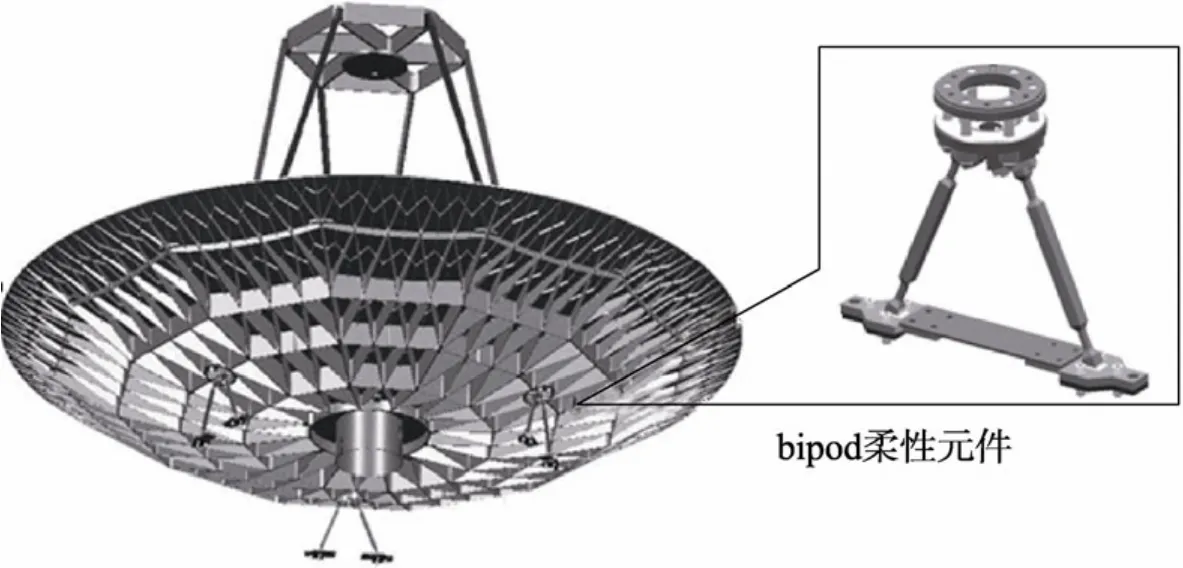
图2 Herschel ø3.5 m SiC反射镜(Bipod柔性元件)Fig. 2 Herschel ø3.5 m SiC primary m irror w ith Bipod flexure
从表1可以看出,Bipod柔性元件按照不同的方式可以分为多种类型。从整体性的角度出发,一体式在大多数情况下都是一个较好的选择,特别是对于较小的反射镜,因为这种分类方式可以简化装配过程并减少由于操作带来的误差;分离式一般应用在大型反射镜上;反射镜和Bipod元件之间安装点的数量应尽量少以减轻对反射镜的不良影响,但逆Bipod在重力沿着光轴竖直方向时可以使得面形有一定的改善;凹口式相对叶片式具有较大的旋转半径[12],具有良好的应用性;混合式实际是凹口和叶片式的组合,具有较好的卸载效果,但增加了制造的复杂性。Bipod相对反射镜的位置主要由空间限制决定,但侧边支撑在重力方向和光轴方向垂直时通常具有较好的面形。从控制方式上看,被动式由于结构简单,因此其应用更为广泛。总体而言,没有一种类型对所有情况都具有良好的适用性,因此设计者必须根据实际需求谨慎地选择、组合适当的类型以达到性能上的均衡。
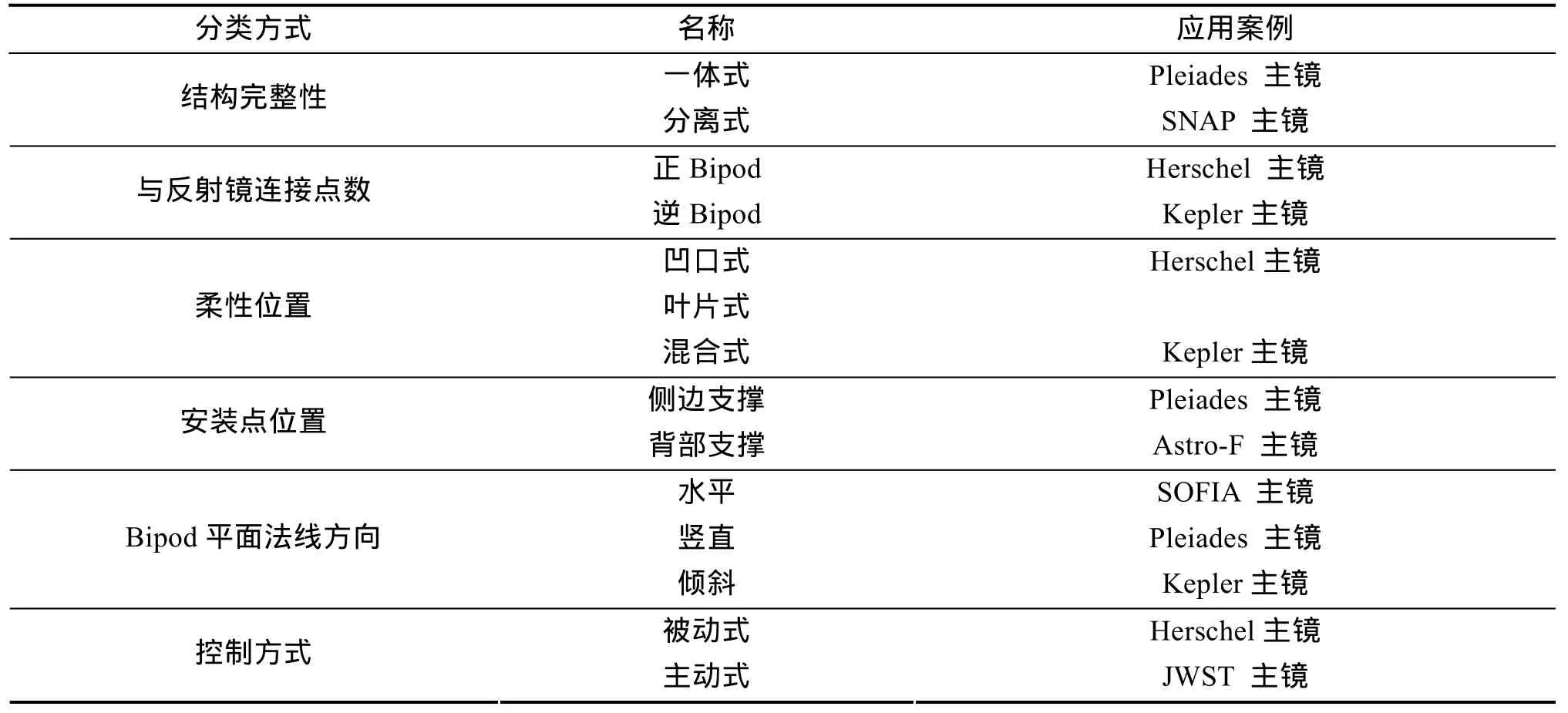
表1 空间反射镜支撑结构的Bipod柔性元件使用分类Tab.1 Classification of the bipod flexure in space mirror assembly
3 Bipod柔性元件的卸载能力评价
Bipod柔性元件涉及的设计参数较多,如 Bipod柔性元件的长度、柔性元件之间的夹角以及布置位置、柔性元件削弱部分的尺寸、柔性元件的材料参数等。建立这些结构参数和反射镜面形卸载能力之间的关系,对于柔性元件的选取和设计具有重要意义。然而从上述分类可以看出,Bipod柔性元件的种类繁多,直接建立设计参数和卸载能力之间的关系还比较复杂,本文下面从表征这些不同种类的Bipod元件的刚度这一共同特性出发,对其卸载能力进行分析。
为了评估柔性元件的准静定程度,本文引入了相对刚度比的概念,即

式中ik、jk分别为柔性元件在自由和约束方向的刚度;ijk为相对刚度比,其数值大小表明柔性或者准静定的程度。对于2-2-2(I)布局,约束运动是切向和轴向的平动,在这种布局中共有8个相对刚度比,当这些数值为0时,可以实现理想的静定支撑,否则就是准静定的或者过约束的。对于柔性元件的卸载能力,下面引入了相对位移比的概念,即

式中iu、ju分别为位移响应量和基础的输入。位移响应可以是特定载荷工况下镜面的峰谷值(Peak-to-valley,PV)或者均方根值(Root-mean-square,RMS),也可以是组件上任何节点的位移;基础输入来自于温度变化以及制造装配误差,这个数据越小则表示结构对反射镜面形的卸载能力越强。理想的静定结构可以达到最佳的卸载效果,也就是说随着相对刚度比的降低,Bipod柔性元件的卸载能力也随之增强,下面将通过实例分析来证明这种关系的正确性,并揭示了卸载能力变化时对组件振动频率的影响情况。
4 相对刚对比和卸载能力之间的关系验证
本文利用数值算例来研究相对刚度比和卸载能力之间的关系。此实例中包含3部分的零件:1个圆形反射镜、1个基板以及3个Bipod柔性元件。为了方便起见,反射镜和支撑之间的胶在这里忽略了。反射镜的材料是微晶玻璃,口径为360mm,内孔径为80mm,反射镜的质量约为12kg。Bipod柔性元件用铟钢加工制备。涉及材料的属性参数见表2,有限元模型图如图3所示。

表2 玻璃及铟钢的材料属性参数Tab.2 Material properties for zerodur and Invar

图3 反射镜组件的有限元模型Fig. 3 M irror assembly of the finite element model
为了研究相对刚度比和卸载能力之间的关系,设计了3个不同柔性的Bipod元件,根据式(1)计算的相对刚度比见表3,其中只考虑了rzk、rkτ两个数值,分别为径向刚度相对轴向和切向刚度的比值。表3中的r, z, t分别为径向、轴向以及切向。卸载能力使用式(2)由面形的PV及RMS改变量相对基础位移输入的比值来计算,并模拟了两种温度变化工况下的卸载能力变化。

表3 3个Bipod柔性元件设计的相对刚度比Tab. 3 Relative stiffness ratios for three kinds of Bipod design %
模型使用MSC/PATRAN建立,然后利用 NASTRAN进行分析,面形参数由空间光学集成分析平台(space optical remote sensor analysis platform,SORSA)中的面形模块计算。 首先进行了模态分析,前5阶频率见表4,计算了两个工况下的静态分析。工况1模拟了组件上不均匀的温度分布;工况2模拟了均匀温度变化情况。两个工况都通过在1个或3个柔性元件基板上施加强迫位移来实现。两个工况下的面形分析结果见表5、6,其中镜面刚体位移变化量用镜面球心在坐标系在X、Y、Z 3个方向上的变化量来表示。

表4 反射镜组件模态分析结果Tab. 4 Modal analysis results Hz

表5 工况1面形变化情况Tab. 5 Changes of the mirror surface figure(case 1)

表6 工况2面形变化情况Tab. 6 Changes of the mirror surface figure(case 2)
从上面的模态分析结果,可以看到组件的频率随着柔性的减小而增加。需要指出的是,并不能依据这些结果说明频率和柔性之间准确的关系,但在绝大数情况下都表现出这种状态,因此在实际工程中必须小心处理这些因素之间的平衡。从表5、6中可以发现镜面面形随着柔性的增加而变好,这些数据的可视化显示如图4、5所示。图中,分别为单位基础强迫位移镜面RMS变化量、单位基础强迫位移镜面PV变化量。从图4中可以看出,相对刚度比和卸载能力之间的变化规律很明显,即卸载能力随着相对刚度比的减小而增加。比如在工况1中,当从6.26%减小到0.96%时, 相对 RMS比值从34变到1。相对RMS和PV比值随相对刚度比的变化规律如图4、5所示,其他的计算量如相对曲率半径变化或者某节点的相对位移比等都具有同样的规律。由于3个设计的绝对刚度不同,将对相对刚度比和相对位移之间的关系产生影响。为了说明在柔性元件刚度大致相同条件下两个比值间的关系,本文采用了近似的方法,即利用了相对位移比和组件基频的比值,对于RMS的评价结果如图6所示,其中纵坐标单位为1/Hz,即单位频率变化对应的相对变化量;为RMS相对变化量。从图6可以看出,在刚度大致相同的情况下,相对刚度比和卸载能力之间保持同样的规律,即随着相对刚度比的减小,柔性元件的卸载能力增强。需要指出的是,图6中在设计2有出现的峰点和利用组件的基频代替柔性元件的基频的差异有关。上述分析中只采用了两个相对刚度比,在进一步的分析中,还需要对其他几个刚度比进行分析,以便揭示这些数值之间的耦合关系以及对组件振动频率的影响。

图4 单位基础强迫位移镜面RMS变化量与 之间的关系Fig. 4 Relations between

图 5 单位基础强迫位移镜面PV变化量与之间的关系Fig. 5 Relations between
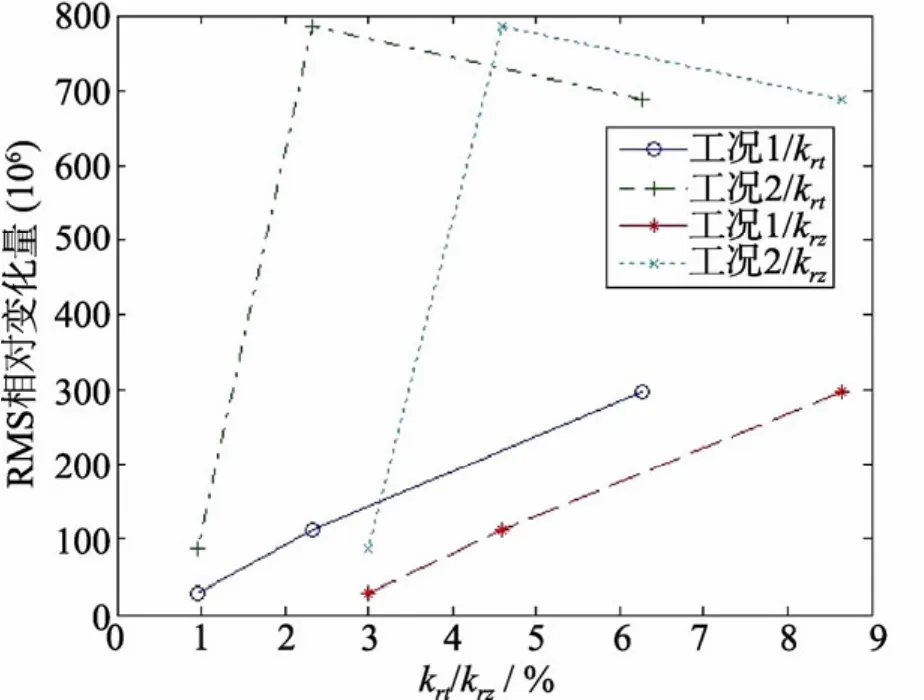
图 6 RMS相对变化量与间的关系Fig. 6 Relations between
5 结束语
Bipod类型的柔性元件是实现空间反射镜准静定支撑的重要部件。本文对于Bipod柔性元件的分类方法在前期工作的基础上进行了完善,然后通过引入相对刚度比和相对位移比的概念,研究了柔性元件准静定度对于卸载能力的影响。对圆形的反射镜和 Bipod柔性元件的组件进行了有限元分析,揭示了这些因素之间的关系,即随着相对刚度比的减小,柔性元件的卸载能力增强。由于Bipod柔性元件的类型以及设计参数的多样性,目前还难以直接建立设计参数和卸载能力之间的关系,这将是对Bipod柔性元件卸载能力深入研究的重点。
References)
[1]宫辉, 连华东.大口径双拱形SiC反射镜北部构型初步研究[J]. 航天返回与遥感, 2010, 31(4): 32-37.GONG Hui, LIAN Huadong.Preliminary Study on Backside Structure of Large-aperture Double-arch SiC M irror[J].Spacecraft Recovery & Remote Sensing, 2010, 31(4): 32-37.(in Chinese)
[2]陈晓丽, 王彬, 杨秉新.大口径超轻型反射镜定位和支撑方案研究[J].航天返回与遥感, 2010, 31(3): 15-20.CHEN Xiaoli, WANG Bin, YANG Bingxin.Study of Positioning and Mounting Scheme of Large Aperture Ultra-light Space Reflector[J].Spacecraft Recovery & Remote Sensing, 2010, 31(3): 15-20.(in Chinese)
[3]曾勇强, 傅丹鹰, 孙继文, 等.空间遥感器大口径反射镜支撑结构形式综述[J].航天返回与遥感, 2006, 27(2):18-22,27.ZENG Yongqiang, FU Danying, SUN Jiwen, et al.Summary of Support Structure Patterns of Large Mirrorfor Space Remote Sensor[J].Spacecraft Recovery & Remote Sensing, 2006, 27(2): 18-22,27.(in Chinese)
[4]Stephen E Kendrick, H Philip Stahl. Large Aperture Space Telescope M irror Fabrication Trade[C]// Proceeding of SPIE, Marseille, France, SPIE, 2008:70102G-1-12.
[5]Kapperlhof J P, Ingenuous J R.Statically Determ ined Structures: Tension between Classical and Modern Design[C]//Proceedings of SPIE, San Diego, CA, SPIE, 2003:114-125.
[6]Keith B Doyle, Genberg V L, M ichels G J. Integrated Opt mechanical Analysis(second edition)[M]. Bellingham: SPIE Press,2012.
[7]Hiroshi Shibai, Astro-F m ission[C]//Proceeding of SPIE,Waikoloa, HI, SPIE, 2002:162-169.
[8]Sholl M, Lampton M, Aldering G. SNAP Telescope[C]//Proceeding of SPIE, Glasgow, Scotland, SPIE, 2004: 1473-1483.
[9]Denis FAPPANI.Manufacturing & Control of the Spherical M irrors for the Telescope of the French Satellite Pleiades[C]//Proceedings of SPIE, San Diego, CA, SPIE, 2007: 1-11.
[10]Petrovsky G T, Tolstoy M N, Ljubarsky S V. A 2.7-meter-diameter Silicon Carbide Primary M irror for the SOFIA telescope[C]//Proceeding of SPIE, Kailua, Kona, HI,SPIE,1994:263-269.
[11]连华东. 空间反射镜Bipod结构设计技术研究[C]//第23届全国空间探测学术交流会议, 厦门:中国空间科学学会空间探测专业委员会, 2010.LIAN Huadong.Space M irrors Bipod Structural Design Technology [C]//23th National Academ ic Conference Space Exploration, Xiamen: China Institute of Space Science Comm ittee of Space Exploration, 2010. (in Chinese)
[12]Hatheway A E. Comparing Blade and Notch Types of Flexures[C]//Proceeding of SPIE, San Diego, CA, SPIE, 1997: 24-29.
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
航天返回与遥感(2022年3期)2022-07-07 05:13:36
数学小灵通·3-4年级(2022年5期)2022-06-01 07:41:02
快乐语文(2021年34期)2022-01-18 06:04:06
电子技术应用(2021年1期)2021-01-22 09:45:06
环境技术(2020年1期)2020-03-06 11:41:02
VOGUE服饰与美容(2019年10期)2019-12-02 07:34:49
航天返回与遥感(2018年2期)2018-05-17 09:37:57
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
