AT89S52的交流异步电机变频调速系统
2013-10-10 01:56:42董家玺常甲兴王晓明
单片机与嵌入式系统应用 2013年6期
董家玺,常甲兴,王晓明
(辽宁工业大学 机械工程与自动化学院,锦州121001)
引 言
目前交流异步电动机的调速已经广泛应用于数控机床、风机、泵类等设备的动力源或运动源,并起到节约电能、提高效率等良好效果。因此,交流异步电动机调速技术是现代自动控制专业技术人员必须掌握的知识。
1 交流异步电动机变频调速原理
根据电机学理论,交流异步电动机的转速可表示为:

式中:n为电动机转数;p为电动机磁极对数;f为电源频率;s为转差率。由上式可知,影响电动机转速的因素有:转差率、磁极对数、电源频率。其中,改变电源频率来实现交流异步电动机调速的方法是最理想的,这就是所谓的变频调速。
2 系统的硬件设计
整个控制系统由两部分组成,即控制电路和驱动电路。控制电路以AT89S52为控制核心,配以三相SPWM信号发生和控制集成芯片SA4828。驱动电路是以PS21564为核心的智能功率模块(Intelligent Power Module,IPM)。硬件接口电路如图1所示。
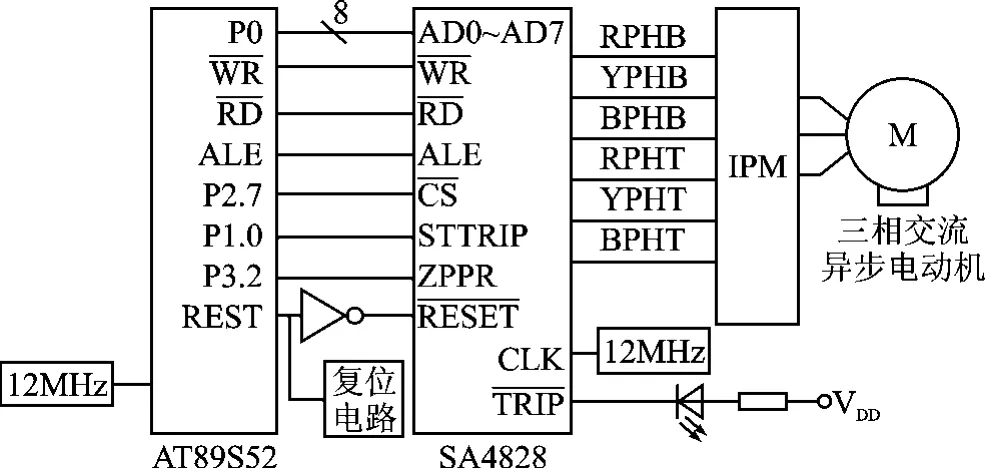
图1 硬件接口电路
2.1 SA4828专用运动控制芯片
SA4828工作原理:来自AT89S52的数据通过总线控制和译码器进入初始化寄存器或控制寄存器。它们对相控逻辑电路进行控制。外部时钟输入经分频器分成设定的频率,并生成三角形载波,三角形载波与所选定的片内ROM中的调制波形进行比较,自动生成SPWM输出脉冲。通过脉冲删除电路,删去比较窄的脉冲,因为这样的脉冲不起任何作用,只会增加开关的损耗。通过脉冲延时电路生成死区,保证任何桥臂上的两个开关不会在状态转换期间短路。看门狗定时器用来防止程序的跑飞,当时间条件满足时快速封闭输出,极大地减轻了单片机的负担。
片内ROM存有三种可供选择的波形,如图2所示。分别为纯正弦波形、增强型波形和高效型波形。每一种波形各1536个采样值。增强型波形又称三次谐波,它可以使输出功率提高20%,三相谐波相互抵消,防止电动机发热。高效型波形又称死区带三次谐波,它是进一步优化的三次谐波,可以减少逆变开关的损耗,提高功率利用率。
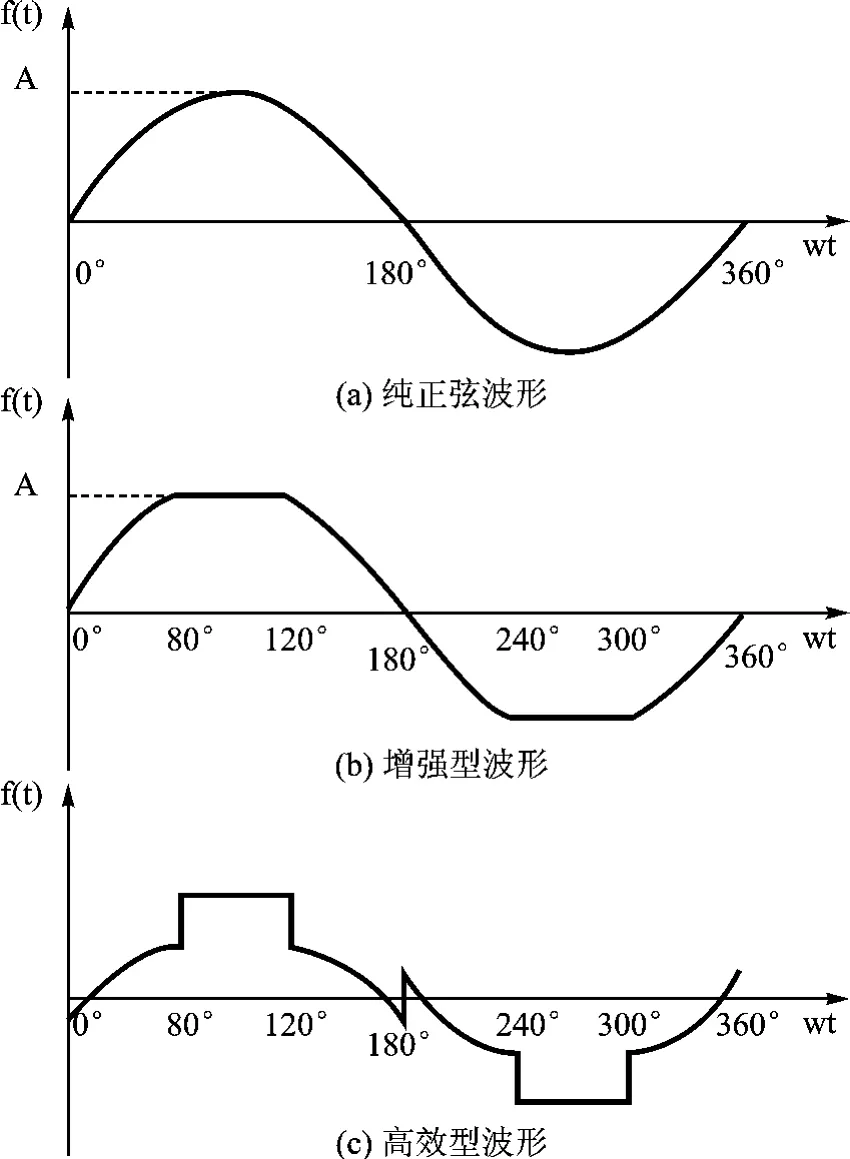
图2 片内ROM存有的三种波形
SA4828主要具有以下特点:
①具有增强型微处理器接口,可与更多的单片机兼容;
② 将调制波频率的分辨率提高到16位;
③ 由于采用了可由用户选择的三相幅值独立控制方式,因而使得三相逆变可用于任意不对称负载;
④ 有三种可供选择的输出波形,适用于多种应用场合;
⑤ 可提供软件复位功能;
⑥内置看门狗定时器以加强监控,从而提高了可靠性。
2.2 智能功率模块PS21564
PS21564采用第5代IGBT技术,6单元三相输出结构如图3所示,内置优化后的栅极驱动技术和保护电路,以超小型的体积,输出功率强劲的三相波。图中U、V和W为逆变桥的输出,它们为相差120°来自SA4828的高压SPWM波。逆变桥由两组(3个上桥臂IGBT,3个下桥臂IGBT)构成,每一时刻总有3只逆变管导通,另外3只逆变管关断,并且上下桥臂的3对一一对应,逆变管不能同时导通。PS21564具有短路、欠压、过热保护功能,一旦发生故障,内部的6个逆变管就会同时关断,同时发出故障信号到主控制器单片机,单片机控制SA4828停止发送SPWM波,并向保护中断引脚发出中断请求。

图3 PS21564的6单元三相输出结构图
2.3 光耦隔离
由于SA4828数据处理器输出的是高速PWM脉冲信号,且智能功率模块PS21564对SPWM脉冲的规则性要求很高,需要反应速度较快的光耦,普通的P521光耦无法满足速度要求,故设计中采用的是一款专用的IPM驱动芯片HCPL4504。HCPL4504是美国安捷伦公司专为IPM等功率器件设计的高速光电隔离接口芯片,瞬间共模比为15kV/μs,内部集成高灵敏度光传感器,可以准确、快速地反映信号变化状况。
同时,为了防止SA4828数据处理器和智能功率模块PS21564的相互影响以及高压输出的人身危险,建议使用HCPL4504的光耦隔离。图4所示为IPM的上桥臂隔离。图5所示为IPM的下桥臂隔离。
3 系统的软件设计
单片机将数据送入SA4828芯片内的两个寄存器(初始化寄存器和控制寄存器)。初始化寄存器用于设定与交流电动机有关的基本参数,这些参数要在SPWM输出端允许输出前设定,系统工作以后不允许改变。

图4 IPM上桥臂输入电路图
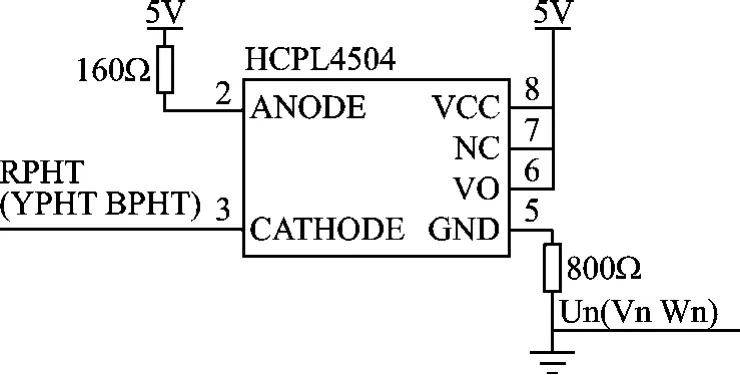
图5 IPM下桥臂输入电路图
3.1 主程序设计
单片机首先初始化SA4828,打开中断系统。传送控制参数后,若SA4828允许输出,则单片机向其发出SPWM的控制信号,驱动及隔离电路开始工作。在运动过程中,单片机不断地处理反馈信号,及时地对SPWM波进行调整,来满足系统的需要,如图6所示。
3.2 调速子程序
SA4828寄存器列阵包含8个8位寄存器R0~R5和R14、R15。其中,R0~R5用来暂存来自单片机的数据,这些数据可能是初始化数据,或者是控制数据;而R14、R15是2个虚拟寄存器,物理上不存在。当向R14写操作时,实际是将R0~R5中存放的48位数据送入初始化寄存器。当向R15写操作时,是将R0~R5中存放的48位数据送入控制寄存器,如表1所列。控制寄存器在工作过程中控制输出脉宽调制波的状态,从而进一步控制交流电动机的运行状态。通常在工作时,该寄存器的内容常被改写,以实现对交流电动机的速度进行控制。调速子程序如图7所示。

表1 各寄存器地址
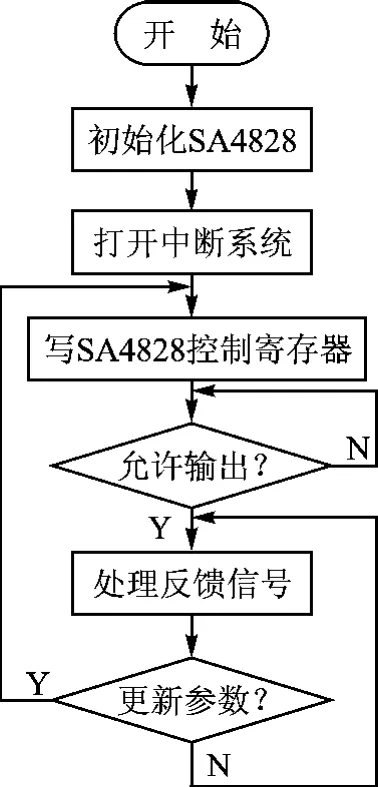
图6 系统主程序流程
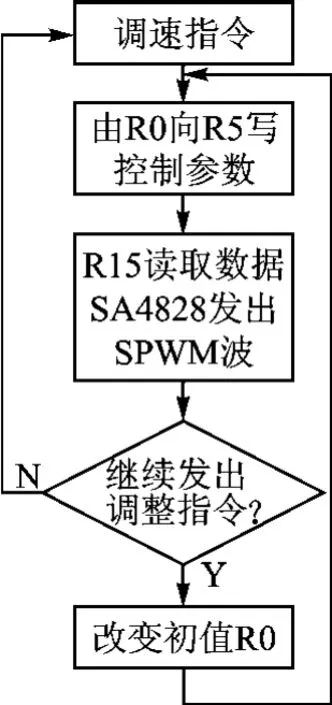
图7 调速子程序
3.3 中断子程序
中断处理程序针对都是需要立即处理的情况和突发事件,例如过流、欠压、外部故障等情况。一旦故障发生,SA4828的SETTRIP端口就会立即启动故障保护程序,封锁SPWM波的发送,同时将TRIP端口置0并且向单片机发出开中断申请。中断保护子程序如图8所示。
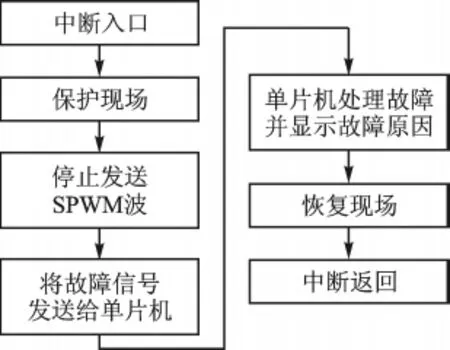
图8 中断子程序
4 实验结果
上电后,系统运行频率为10Hz时SPWM波形如图9所示。系统运行频率为45Hz时,SPWM波形如图10所示。

图9 10Hz时SPWM的波形
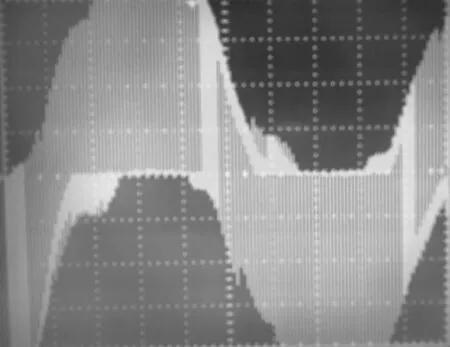
图10 45Hz时SPWM的波形
结 语
该系统具有成本低廉、动态响应快、控制精度高等优点。实验证明,本系统还有良好的抗干扰能力,对电机调速系统的设计和应用也具有指导意义。
[1]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.
[2]王晓明.电动机的DSP控制——TI公司的DSP应用[M].北京:北京航空航天大学出版社,2004.
[3]王晓明.电动机的ADSP控制——ADI公司 ADSP应用[M].北京:北京航空航天大学出版社,2010.
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
计算机应用(2020年5期)2020-06-07 07:06:44
单片机与嵌入式系统应用(2017年7期)2017-07-31 21:57:23
中国科技纵横(2015年2期)2015-11-05 02:30:11
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
科学中国人(2014年16期)2014-11-20 02:50:00
电测与仪表(2014年14期)2014-04-04 11:53:30
中国新技术新产品(2014年3期)2014-03-24 07:39:08
科技传播(2011年24期)2011-08-29 05:39:46