ARM9的超高频读写器基带编解码设计
2013-10-10 01:56:44王丹张红雨
单片机与嵌入式系统应用 2013年9期
王丹,张红雨
(电子科技大学 电子工程学院,成都611731)
引 言
普通的UHF读写器主控芯片使用FPGA较多,其优点是FPGA对时序逻辑处理速度快,使用HDL语言很容易实现协议的编码与解码,但FPGA芯片本身很少具备串口、网口等通信接口模块,功能扩展较麻烦。由于ARM9芯片集成了很多扩展接口,同时进行操作系统移植等更高层次的设计也变得很容易,但对时序逻辑处理较难。因而本文提出了基于ARM9的UHF RFID读写器基带编解码方法,并加以实现。
1 基本原理
UHF RFID国际标准协议规定读写器到电子标签的通信应采用 DSB-ASK、SSB-ASK 或者 PR-ASK 调制方式。本文使用ARM9芯片S3C2440的PWM(脉宽调制)控制模块进行PIE编码,通过编码信号控制射频开关实现OOK调制。电子标签接收到命令后反向散射副载波应答,经过射频模块的天线接收后被解调电路还原成MILLER2数据。构造 MILLER2解码状态机,使用S3C2440的外部中断对MILLER2时序序列进行上升沿捕捉,捕捉到的两次中断的时间间隔作为状态机输入,进而解调出标签反射回来的数据。系统的硬件框图如图1所示。
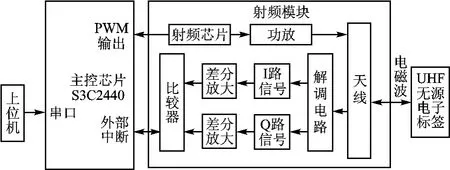
图1 系统硬件框图
读写器射频模块的工作流程为:发送命令时,PIE编码电平控制射频芯片开关,当开关开启时输出射频载波,关闭则不输出,以达到OOK调制载波的目的。接收机采用零中频接收机方案,直接对天线接收到的标签反向散射信号进行解调,解调完毕得到相位相差90°的I、Q两路信号,通过差分放大器放大处理后,输出到比较器,经过比较后电路输出MIILER2编码时序信号。
2 PIE编码
2.1 PIE码简介
EPC GNE2协议规定UHF读卡器向标签发送命令时,数据应采用PIE编码。PIE码通过高低电平的时间长度不同来规定数据是“1”还是“0”。协议使用Tari代表数据“0”,时间长度在6.25~25μs范围内,容差为±1%,数据“1”的宽度在为1.5Tari~2.5Tari,如图2所示。本次编码中,Tari值为6.4μs,数据“1”的长度为11.4μs,PW 的长度为3.2μs。
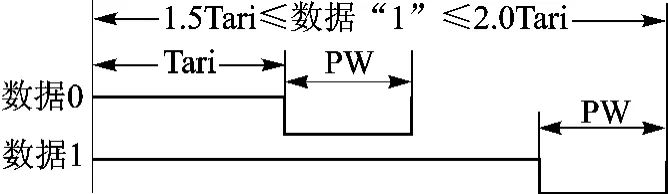
图2 PIE数据“1”和“0”的编码方式
协议规定,完整的PIE码需在有效数据前加上前同步码或帧同步码。前同步码由定界符、Tari、RTcal以及TRcal这4段组成,用在Query命令上。帧同步码省去了TRcal而直接由前三项组成,用在其他命令上。前同步码示意如图3所示。

图3 PIE前同步码
2.2 PWM实现PIE编码
S3C2440有5个16位的定时器,其中定时器1~4具有PWM(脉宽调制)功能,定时器使用经过分频后的系统时钟PCLK作为时钟输入。本设计中100MHz的PCLK经过2分频得到50MHz频率的定时器输入时钟,定时器每计数一次耗时0.02μs。定时器使用两个16位的缓冲寄存器TCNTB和TCMPB来实现PWM功能,TCNTB为一次PWM输出计数次数,采用递减的方式计数,当计数减为TCMPB的时候,PWM输出电平反转。以数据“0”为例,其脉冲总宽度为6.4μs,低电平持续时间3.2μs,则可计算出 TCNTB=6.4/0.02=320次,TCMTB=3.2/0.02=160次。
为实现连续的PWM输出,需要让定时器工作在自动重载模式,即当定时器计数器减为0的时候,在定时器中断处理函数里更新TCNTB及TCNMPB,让定时器重新开始一次脉宽输出。定时器1初始化时经过以下步骤:
①TCNMB以及TCMPB寄存器赋非零初值;
②TCON中人工装载位配置为1,TCNTB和TCMPB更新到内部计数器;
③TCON中自动重载位配置为1,为实现连续的PWM功能;
④TCON中输出翻转位配置为1,脉冲以高电平开始;
⑤TCON置为启动位;
⑥TCON设置关闭人工装载,定时器开始启动。
经过以上配置后,将定时器I/O引脚配置为PWM输出模式就可以进行PWM输出。以一个Query命令的编码为例,Query命令是由前同步码和22位数据构成,先将这22位数据计算好并保存在全局数组data[]中,发送Query命令时开启定时器1并允许定时器1中断,在中断处理函数里面更新TCNTB以及TCMPB的值来决定下一个脉冲的PWM输出。编码程序流程如图4所示。
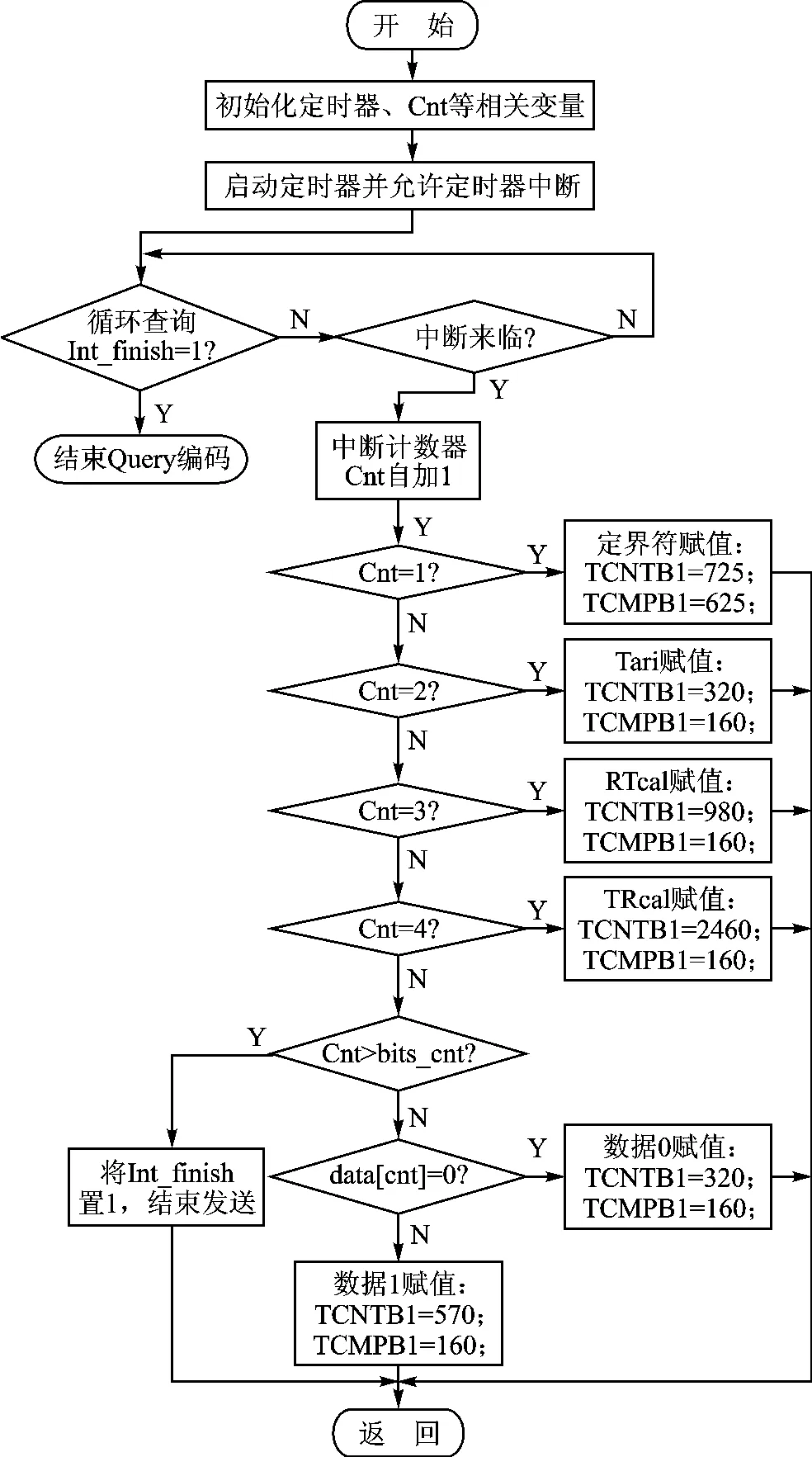
图4 Query命令编码程序流程
正确的Query命令会让标签返回16位伪随机数RN16。为了测试Query命令是否发送正确,使用示波器观察比较器输出,如果有MILLER2编码的16位数据输出,则表明Query命令正确。使用示波器观察的结果如图5所示,可以看出是MILLER2编码的序列,详细分析其位数后确认是16位,验证了PIE编码的正确性。
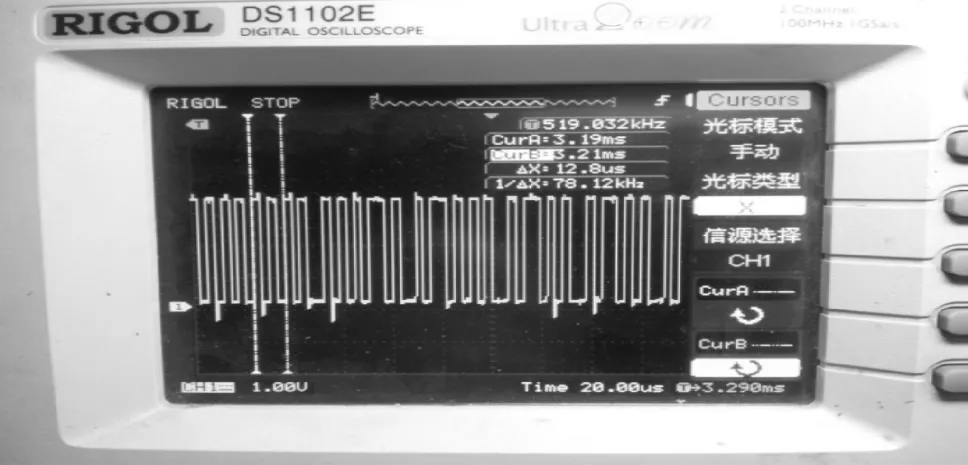
图5 示波器上观察比较器RN16输出
3 MILLER2解码
3.1 MIILER2码介绍
EPC GEN2协议中规定标签反向散射的数据应该采用FM0或者MILLER的编码方式。MILLER定义在两个数据“0”之间变换相位,在数据“1”中间放置一个相转化,MILLER2码则表示每一位数据重复两个副载波周期。完整的MILLER2编码,需要在有效数据前加上前同步码。前同步码可编程选择格式,在Query命令中将M和Trext这两位设置为1,选择前同步码由16个数据“0”加上数据序列“101112”构成。MILLER2数据定义和前同步码如图6所示。MILLER2码每一位数据的时间长度由Tari值决定,本设计中为2个Tari(即12.8μs)。
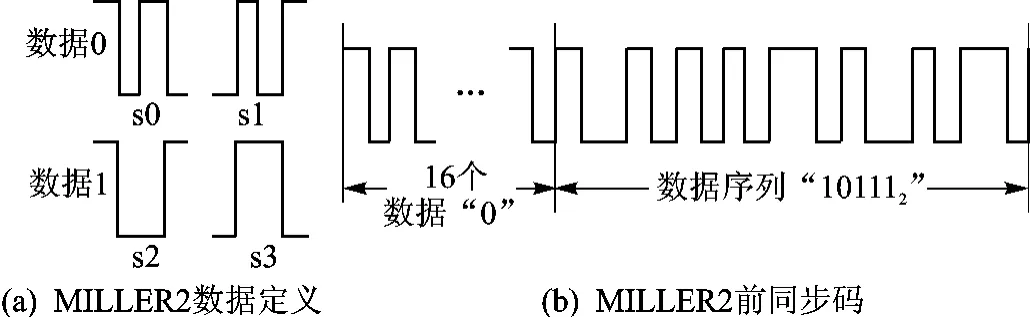
图6 MILLER2数据定义以及编码状态转换
3.2 解码状态机
本文使用S3C2440的外部中断捕捉比较器的输出,使用单边触发上升沿检测。对正确的MILLER2编码序列进行上升沿捕捉时,两次中断的时间间隔有a和b两种情况,其中a表示两次中断的时间间隔为Tari,即6.4μs,b表示间 隔 为 1.5Tari,即 9.6μs,据 此 绘 制 了MILLER2编码的状态以及状态转换图。状态共有22个,其中用于前导码检测的状态有13个,用于数据检测的有9个状态。部分前导码状态以及全部数据状态如图7所示。
下面描述各个状态的意义。
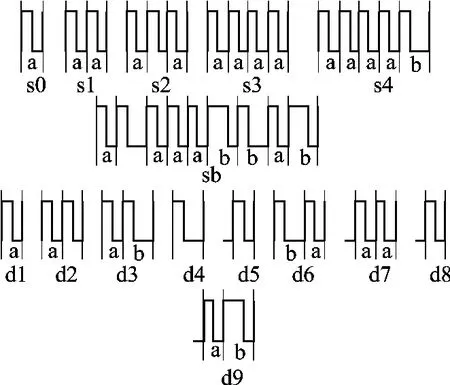
图7 部分前导码状态以及数据状态
s0:解码开始,表示收到1个a间隔;
s1:前导码状态的一种,表示收到2个a间隔;
s2:表示收到3个a间隔;
s3:收到4个a间隔,s3状态若连续收到a间隔,则仍旧归于s3状态;
s4:表示s3收到b间隔,此时前导码中的16个数据“0”解码结束,进入数据序列“101112”解码状态;
s5~sa:前导码中的数据序列“101112”检测状态,依次类推,图7中省略;
sb:前导码结束状态;
d1:收到数据“0”的2/4位;
d2:收到完整数据“0”以及数据“1”的1/4位;
d3:收到完整数据“0”以及数据“0”的1/4位;
d4:收到数据“1”的3/4位;
d5:收到数据“0”的3/4位;
d6:收到完整数据“1”以及数据“0”或者“1”的1/4位;
d7:收到完整数据“0”以及数据“1”的1/4位;
d8:收到完整数据“1”;
d9:收到完整数据“0”以及数据“0”的2/4位。
以上状态中,当状态机当前状态为d2、d3、d6、d7、d8、d9的一种时,表示收到1位有效数据。状态转换图如图8所示,状态d2、d7只画出了有效输入时的转换图,在无效输入时结束状态机程序返回。
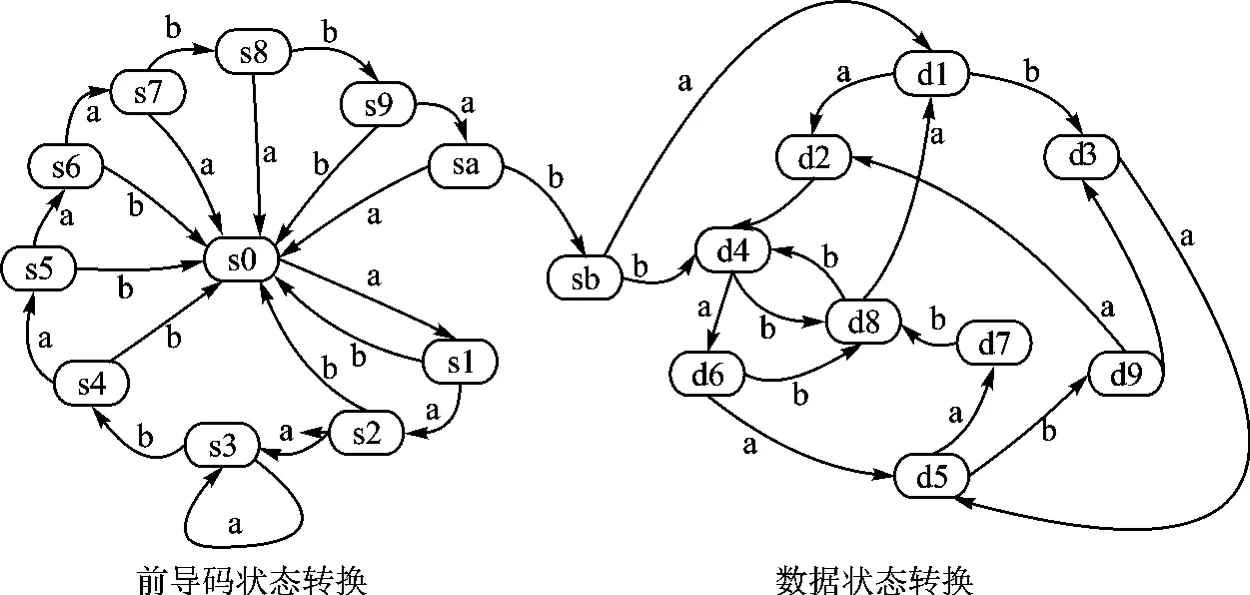
图8 MILLER2解码状态转换图
3.3 MILLER2解码程序设计
进行MILLER2解码主要是把接收到的中断时间间隔作为状态机的输入,在状态机里进行判断和状态转换,解码出有效数据。本设计中,使用上面描述的编码方式码发送Query命令,UHF电子标签收到有效命令之后反向散射采用MILLER2编码的16位伪随机数RN16。程序在发送完毕Query命令之后立即使能外部中断,在外部中断处理函数中,把中断时间间隔保存在数组中,等接收的中断间隔超过b或者中断次数超过接收RN16所需要的次数后,关闭中断。在外部程序中通过状态机进行解码,解调的同时对有效位进行计数,计数器达到16位后,返回解调出来的数据,否则返回0。解调程序流程如图9所示。

图9 解码程序流程图
在主函数里面循环发送Query命令并进行MILLER2解码,如果解码成功则使用串口工具在上位机上打印出解调出来的RN16的值,解码失败则不打印。在PC上使用串口工具SecureCRT观察到以十六进制输出的RN16,如图10所示,表明MILLER2解码成功。
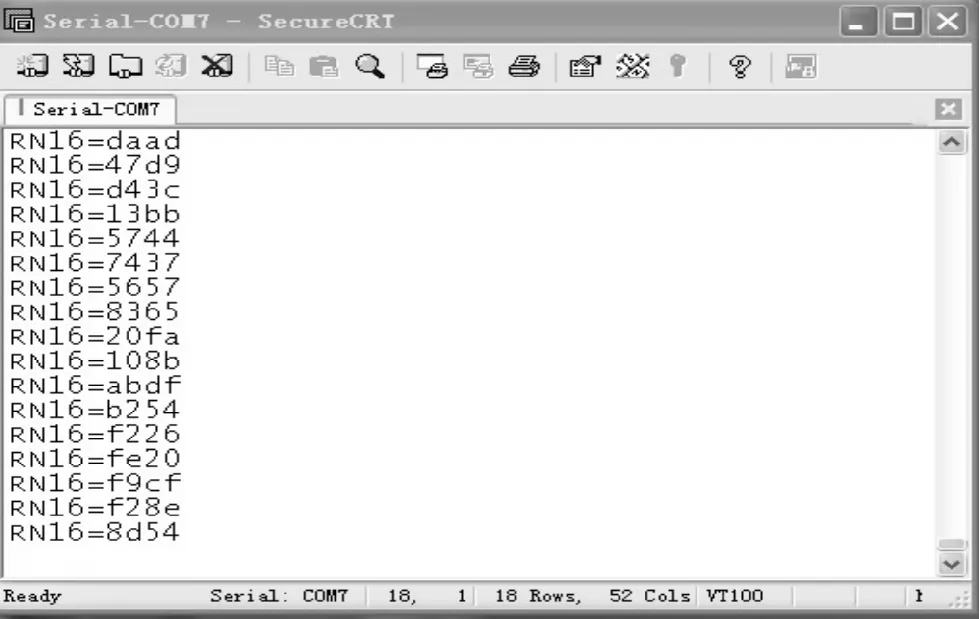
图10 解码结果
结 语
本文提出使用ARM9进行UHF RFID读卡器基带编解码,并加以实现。ARM9芯片丰富的外设使该方案拥有较好的扩展性、实用性,为进行系统级别的设计打下了基础。
[1]EPC global Inc.EPC Radio-Frequency Identity Protocols Class-l Gen-2UHF RFID Protocol for Communications at 860MHz-960MHz,2004.
[2]于志宏.UHF RFID读写器编解码模块的FPGA实现[J].单片机与嵌入式系统应用,2012(10):12-15.
[3]肖菊兰.超高频RFID读写器设计[J].电子设计工程,2010(11):158-161.
[4]王振兴.RFID系统中标签芯片数字部分的设计实现[D].天津:天津大学,2008.
[5]阳璞琼.超高频RFID系统编解码与校验问题的研究[D].长沙:湖南大学,2009.
猜你喜欢
福建基础教育研究(2020年1期)2020-05-28 08:39:54
北京航空航天大学学报(2019年9期)2019-10-26 02:30:04
网络安全与数据管理(2018年8期)2018-08-27 12:41:26
中国交通信息化(2014年4期)2014-06-05 03:51:10
北京航空航天大学学报(2013年6期)2013-12-19 08:58:16
黑龙江科学(2011年2期)2011-03-14 00:39:36
电子科技大学学报(2011年3期)2011-02-10 05:45:10
空间控制技术与应用(2010年5期)2010-12-23 08:05:25
山西电子技术(2010年3期)2010-05-12 03:15:24
现代电子技术(2009年14期)2009-09-05 09:56:16