
基于单目机器视觉的耐火砖检测技术
2013-10-09 03:28:10李海华文雪平
河北工业科技 2013年6期
李海华,文雪平
(华中科技大学文华学院,湖北武汉 430074)
耐火砖是一种具有特殊用途的材料,通常用来做高炉的炉体或水泥窑等。高温的使用环境对耐火砖的质量提出了特殊的要求,它们的尺寸误差、表面缺陷以及内部结构等都必须符合现有的质量标准。因此,对耐火砖的生产过程进行质量检测是非常关键的。
目前,中国多数厂家是利用简单的工具采用手工操作的方法对耐火砖进行检测,很少采用自动化设备进行在线检测。检测效率低下,并且检测精度不高。随着对耐火砖需求的不断增长,迫切需要厂家采用自动的检测技术来取代手工操作。文献[1]利用CCD传感器来测量砖的厚度和表面,它要求砖块必须处于传送带上的某个固定的位置。文献[2]利用固定的光源,通过分析投影来检测砖块的尺寸,是一种比较精确的方法,但它对放置砖块的位置和角度有严格的要求。本文基于单目机器视觉技术提出了一种快速、自动的耐火砖尺寸检测方法。利用摄像机采集耐火砖的图片,直接通过图像处理技术能快速准确地获得砖块的尺寸。可以大幅度提高检测效率和稳定性,提高了产品的竞争力。
1 耐火砖检测系统的结构和原理
机器视觉检测技术通过对实时拍摄的图像进行分析计算,能够获取到检测目标的形状、轮廓、尺寸、表面特征以及其他信息等。该方法具有高速、高精度、非接触式测量等优点,在对各种不同目标进行在线检测的过程中,得到了广泛的应用[3-6]。
本文采用单目机器视觉检测系统,结构如图1所示。该视觉检测系统主要由计算机和摄像机等硬件组成,为了获取更清晰的图像,利用专用的光源进行照明。由于耐火砖的长度、宽度和高度是固定值,采用结构简单,可靠性高的单目机器视觉系统是比较合适的选择。

图1 视觉检测系统结构框图Fig.1 Structure of visual inspection system
测量过程中,将摄像机正对着被检测目标的某一个表面,采集一幅图像,并传送给计算机,由计算机进行分析计算,即可得出所需的信息。它的基本原理是两个平面之间的映射关系,即被检测目标平面上的每个点与它在图像平面上的投影点之间是一一对应的[7],如图2所示。

图2 两平面间的映射关系Fig.2 Mapping relationship between two planes
假设P(x,y)是目标平面坐标系O-XY中某个目标点的坐标,即耐火砖表面的某个点;P′(u,v)是P点在图像平面O′-UV上投影的坐标。那么,P与P′点之间的映射是线性的,可表示如下[8]:
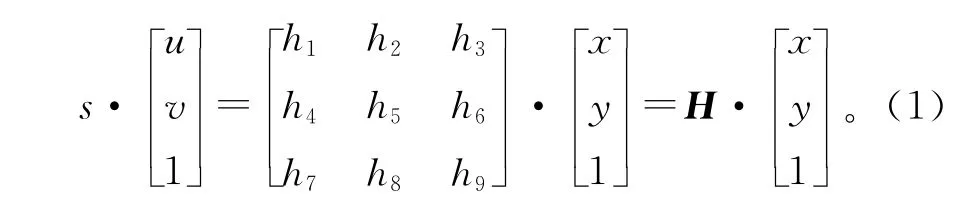
其中:s是比例系数;H是表示映射关系的矩阵。
矩阵H中每个元素的值由摄像机的一些参数组成,需要对系统进行标定才能确定[9]。当通过标定确定这些参数后,即可对耐火砖的长度和宽度进行测量和计算。由式(1)可得:
如果在图像平面中能够计算出砖块所有边缘点和角点的坐标P′(u,v),那么,将这些坐标分别代入式(2),可计算出它们在O-XY坐标系中对应点的坐标P(x,y),从而得到耐火砖的实际长度、宽度、平行度、垂直度等信息。下面介绍图像平面中砖块的边缘点和角点坐标的计算方法。
2 耐火砖图像的采集和处理
2.1 图像的采集
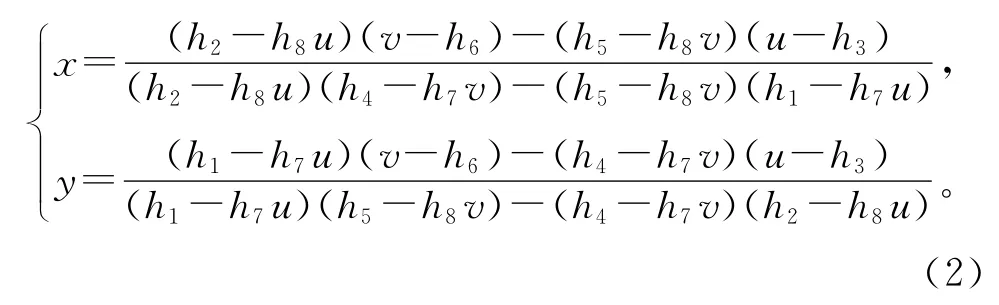
耐火砖通常是在模具中压制而成的,它的表面比较粗糙。为了获取清晰的图像,还需要选用合适的光源进行照明。本文以矩形耐火砖为例进行尺寸的测量,采集到的图像如图3所示。
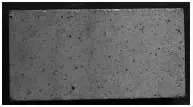
图3 耐火砖图像Fig.3 Image of firebrick
2.2 图像的处理
耐火砖的棱和角经常会被磨损,导致它比规定的尺寸要小,其图像处理过程也比较复杂。经过仔细分析耐火砖的边缘特征,本文对其图像采用边缘提取、边缘连接、边缘分割和边缘拟合4个步骤来完成图像处理。
1)图像边缘提取
当摄像机采集到耐火砖的图像后,计算机先读取图像,并进行滤波处理,再利用Canny边缘检测算子对它进行边缘提取[10],即可获得一幅单像素宽度的边缘图像。此时,绝大多数的边缘点已经从耐火砖的图像中被提取出来。同时砖块表面上的一些纹理,以及角上微小的磨损部分的边缘也都被提取出来了,它们均为不规则的曲线。
2)图像边缘连接
由于提取到的图像边缘是不连续的边缘点,在边缘拟合之前需要对它们进行边缘连接。先对图像中不连续的边缘点进行8邻域的搜索,相邻的边缘点被视为在同一边缘线上。经过搜索后,再把一些不同的边缘点连接起来代表着相应的不同的边缘线。由于耐火砖表面上的纹理多数为类似颗粒状的轮廓,它们的边缘特征是曲率大、尺寸小。因此,可以根据边缘线条的长度和曲率,将许多表面纹理的边缘从搜索结果中滤除掉。
3)图像边缘分割
当砖块2条相邻的边被连接成一条边缘线之后,不能直接对这条边缘线进行直线拟合,应该先进行边缘分割。在边缘分割时,要检查每一条边缘线,并计算该线条上每个点的曲率,如果某个点的曲率异常的大,就以该点为界将边缘线条分割开。分割后的线条用不同灰度的粗线条表示,如图4所示。
图4 分割后的图像边缘Fig.4 Edges of the image after segmentation
4)图像边缘拟合
通过边缘分割将图像的4条边分割开之后,最后对它们的边缘进行拟合。砖块4个顶点的坐标、2条平行边缘之间的距离、边缘的长度等参数都能通过线性的拟合直线方程计算出来。
3 实验和结果
3.1 单目机器视觉检测系统的标定
对该视觉检测系统进行标定的主要任务是确定映射关系矩阵H中每个元素的值。本文选取标准环规为对象,如图5所示,采用上述测量方法对系统参数进行标定。

图5 标定用的标准环规Fig.5 Standard ring for demarcate
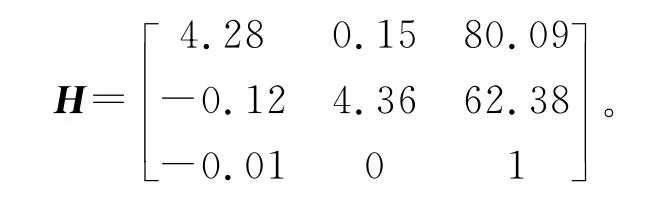
在目标表面选取i个特征点来进行实验,它们的坐标分别为Pi(xi,yi),在图像平面上可以分别计算出它们的投影坐标P′i(ui,vi)。将这两组坐标代入式(1),以hj(j=1,2,…,8,h9=1)为变量建立方程组,即可计算出矩阵H中每个元素的值。实验中选择了8个点来进行计算,结果如下:
3.2 耐火砖的尺寸测量实验与结果
实验过程中,随机选取生产尺寸应该为300 mm×150mm的耐火砖来进行检测,同时对砖块采用了与图3不同照明亮度、以及不同拍摄角度的方式进行图像采集,获取的图像如图6所示。
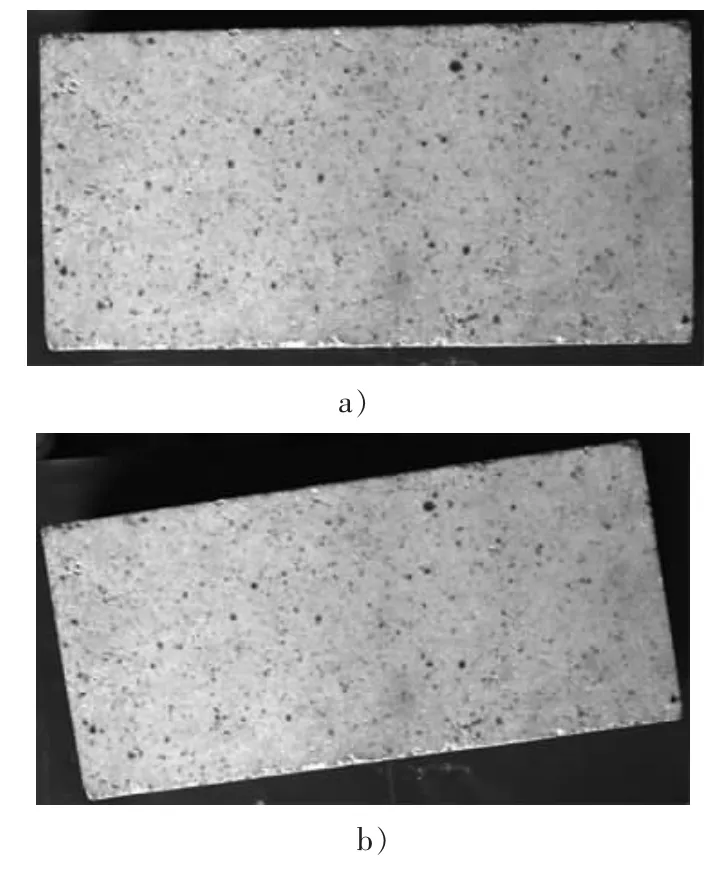
图6 不同角度的耐火砖图片Fig.6 Firebrick images from different angles
实验中任意选取了不同砖块的5幅图像,依据上述步骤,分别进行分析和计算,获得它们的长度和宽度的测量结果,见表1。表中每块耐火砖的长度和宽度均有2个值,分别代表2条平行边缘的相应值。
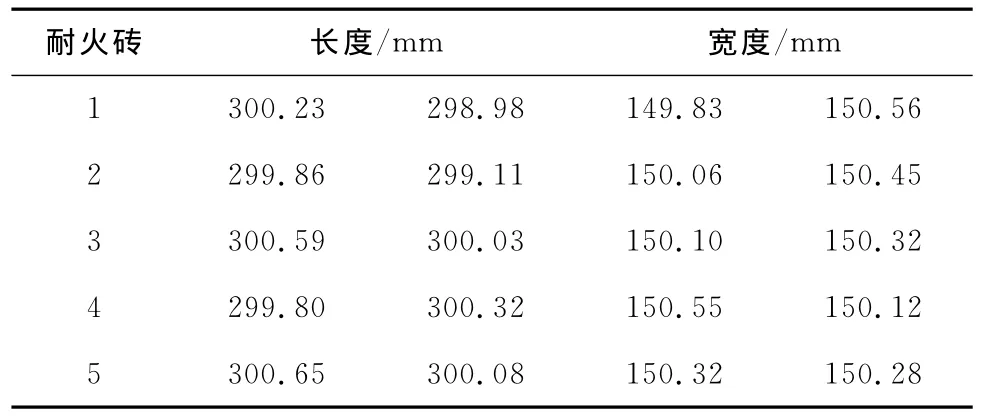
表1 耐火砖长度和宽度的测量结果Tab.1 Measurement result of length and width for firebricks
同时,利用卡钳对以上砖块的实际尺寸进行了测量。实验数据表明,利用单目机器视觉检测技术测量出的结果与实际尺寸之间的误差很小,符合质量检验的要求,该算法具有较好的可靠性和稳定性。
4 结 语
基于图像处理技术提出了一种利用单目视觉对耐火砖尺寸进行检测的方法,并介绍了相关的图像处理技术。该视觉检测系统主要由计算机和摄像机组成,系统结构简单,便于实现。实验表明,该算法便捷,测量的精度和稳定性能满足生产的需求。它将机器视觉技术应用于传统的耐火砖生产和质量检测领域,有着广泛的应用前景。
/References:
[1]胡鸿豪,李冰林,蔡志端,等.基于CCD的瓷砖厚度在线检测研究[J].山东陶瓷,2006,29(3):14-16.HU Honghao,LI Binglin,CAI Zhiduan,et al.Research for the on-line thickness detection of ceramic tile based on CCD[J].Shandong Ceramics,2006,29(3):14-16.
[2]HE Junji,SHI Li,XIAO Jianli,et al.Size detection of firebricks based on machine vision technology[A].International Conference on Measuring Technology and Mechatronics Automation[C].[S.l.]:[s.n.],2010.394-397.
[3]李保章,崔彦平,李荣廷.视觉测量中基元特征亚像素提取方法的研究[J].河北科技大学学报,2012,33(2):146-149.LI Baozhang,CUI Yanping,LI Rongting.Extraction of feature primitives of computer vision[J].Journal of Hebei University of Science and Technology,2012,33(2):146-149.
[4]沈宝国,顾寄南,陈雪芳,等.基于单目视觉的零件抓取信息提取技术[J].制造业自动化,2012,34(9):24-26.SHEN Baoguo,GU Jinan,CHEN Xuefang,et al.Extraction technology of parts grab information based on monocular vision[J].Manufacturing Automation,2012,34(9):24-26.
[5]郭晓欣,李 颖,王震洲,等.基于纹理分割的视频人体检测[J].河北工业科技,2012,29(3):163-165.GUO Xiaoxin,LI Ying,WANG Zhenzhou,et al.Video detection of body based on texture segmentation analysis[J].Hebei Journal of Industrial Science and Technology,2012,29(3):163-165.
[6]李海华,陈 利.利用图像实现孔类零件内径检测的方法[J].工具技术,2011,45(6):91-93.LI Haihua,CHEN Li.Method of inner diameter measurement for hole part using image[J].Tool Engineering,2011,45(6):91-93.
[7]王 娟,赵 艳.基于单幅图像目标空间定位的算法研究[J].河北科技大学学报,2011,32(4):347-350.WANG Juan,ZHAO Yan.Target spatialization algorithm based on single image[J].Journal of Hebei University of Science and Technology,2011,32(4):347-350.
[8]韩延祥,张志胜,戴 敏.用于目标测距的单目视觉测量方法[J].光学精密工程,2011,19(5):1 110-1 116.HAN Yanxiang,ZHANG Zhisheng,DAI Min.Monocularvision system for distance measurement based on feature points[J].Optics and Precision Engineering,2011,19(5):1 110-1 116.
[9]解则晓,辛少辉,李绪勇,等.基于单目视觉的机器人标定方法[J].机械工程学报,2011,47(5):35-39.XIE Zexiao,XIN Shaohui,LI Xuyong,et al.Method of robot calibration based on monocular vision[J].Journal of Mechanical Engineering,2011,47(5):35-39.
[10]李海华,齐红敏,万亮亮.一种改进的六边形结构的Canny边缘检测算法[J].光学仪器,2011,33(1):19-23.LI Haihua,QI Hongmin,WAN Liangliang.An improved algorithm of Canny edge detection of a hexagonal structure[J].Optical Instruments,2011,33(1):19-23.
猜你喜欢
佛山陶瓷(2023年11期)2023-11-30 12:35:06
水泥技术(2022年5期)2022-09-28 07:50:50
中氮肥(2021年2期)2021-12-25 10:01:52
英语文摘(2021年10期)2021-11-22 08:02:40
幼儿智力世界(2021年2期)2021-05-17 18:12:52
中国惯性技术学报(2019年1期)2019-05-21 00:58:30
北京航空航天大学学报(2017年4期)2017-11-23 05:48:16
光学精密工程(2016年4期)2016-11-07 09:05:11
化工管理(2016年4期)2016-09-12 02:29:42
小朋友·快乐手工(2016年6期)2016-05-14 17:18:35
