
深水大地电磁数据采集的若干理论要点与仪器技术
2013-10-08 01:00魏文博景建恩何水原罗贤虎史心语
地球物理学报 2013年11期
邓 明,魏文博*,盛 堰,景建恩,何水原,罗贤虎,史心语
1 中国地质大学(北京)地球物理与信息技术学院,北京 100083
2 广州海洋地质调查局,广州 510075
3 地下信息探测技术与仪器教育部重点实验室,北京 100083
1 引 言
海底大地电磁探测(Marine MT)起始于20世纪70年代,当时的西方学者力图将陆地MT移植到海洋,并在理论上进行了可行性研讨[1-2].在观测装置的设计方面,Filloux做了初期尝试.他使用现在看来简陋,但当时却是较先进的技术,研发了水下检测电场和磁场的装置,为海洋电磁场的测量做了开拓性的工作[3-4].之后,他和Cox共赴大西洋采集MT数据,并且给出了海洋电磁方法可以解决特殊地学问题的评价[5].随着研究的深入,至80年代,海洋MT仪器已发展到相当规模.1985年,Webb等人撰文[6],首次系统地介绍了该类仪器的工作原理、技术指标以及测试情况,随后,他们获得了美国专利授权[7].
海洋MT仪器的发展历程并非一帆风顺,其间经历过多次的失败与教训.由于海洋探测风险大、投资高、不测因素多,仪器的故障事件也就不时发生.1989年,在东太平洋法属Polynesia群岛附近,来自法国Bretagne大学和美国Scripps海洋研究院的地球物理学家使用大地电磁成像方法勘查Tahiti海区的地热源分布.在为期3个月的海底数据采集过程中,参与测量的9套仪器中有3套仪器损坏.其中,2套仪器磁场通道出了问题,1套仪器电场通道出了问题[8].1990年9月至1992年2月,由美国WoodsHole海洋研究院、夏威夷大学海洋系的多位学者组成的研究组,使用11套海底地电仪,在北大西洋26.478°N—26.528°N、72.602°E—76.848°E海区进行了为期近一年半的超低频海底地电场采集,试图通过地电信息了解该海域深部热盐环流的规律.参与测量的仪器工作于水深900m至4958m.遗憾的是,大部分仪器由于电路损坏或电池不足等原因,未能得到真实的地电信号,只有其中四台仪器采集到有价值的数据[9].由此看来,海底电磁探测仪器比陆上同类仪器的故障概率高得多,研发过程的技术难度很大,其可靠性尤其值得关注.
20世纪90年代后,海洋MT从方法到仪器逐渐发展,趋于成熟.主要应用在两大方面,一是地学基础研究,二是海底资源调查.比较著名的例子有MELT计划,它由来自美国、法国、日本等国的科学家共同实施.采用47台大地电磁仪,在水深约4000m的大洋底面采集数据,对东南太平洋17°N、110°W—116°W的海底构造进行电磁层析成像分析.通过地形校正及电磁数据反演揭示了海底洋中脊的电性成像,从而解答了该海区地幔结构非对称的问题[10].除地学基础研究的成果外,海洋MT在油气勘查中也取得显著效益.在墨西哥湾Gemini海区,MT数据与地震勘探结果联合反演,最终推断出盐丘的底面深度以及储油的构造形态[11].这些例子说明,MT方法在海洋地学探测中可发挥积极作用.当今,海洋MT和海洋可控源电磁(CSEM)一起,被认为是海洋地球物理领域性价比最高的方法之一[12].可以断言,海洋电磁方法的发展前景极为可观.
国内在上述领域的研究尽管起步较晚,但近些年进步明显[13].国家高技术研究发展计划(863计划)从“九五”期间开始,至“十二五”,连续四次资助国内的产学研机构开展海洋MT的理论研究和仪器研发[14],并取得了长足进步[15].
2 海洋MT数据采集的若干理论要点
2.1 沿海水及层状介质传播的大地电磁场
在水平层状介质中,平面波场赫姆霍兹方程的解有如下形式[16]:
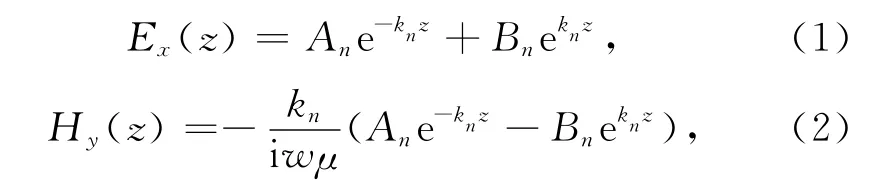
考虑在介质分界面处,电场与磁场水平分量连续,当z=hi(从海平面到第i层介质底界面的深度,i=1,2,…,n-1),

则在第一层(海水)底界面

在第二层底界面

在第n-1层底界面


第n层介质当z→∞时,电磁场分量均趋于零,由(9)式,必有Bn=0,则该式简化为

从(8)式和(10)式,得到An-1与Bn-1的关系,设

由(8)、(10)和(11)式可得

以此类推,第i-1层的比值系数Mi-1与第i层比值系数Mi的递推关系为

对于海水层,则有
由第n-1层底界面向上递推,可得到海水层及海底各层介质的电磁场系数An和Bn表达式.代入式(1)和(2)中可计算出海平面以下任意深度的电磁场分量.
2.2 随水深和频率改变的场值衰变规律
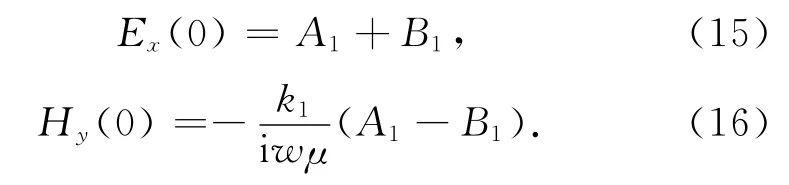
由上述推导的公式,并针对一般且有代表性的情况,建立图1的四层地电模型,计算从海平面至4000m水深条件下不同频点的电场和磁场的衰变曲线.
对图2和图3进行分析.它们有共性,即各频点的场值都随海水的加深而趋于变小,各条曲线呈低
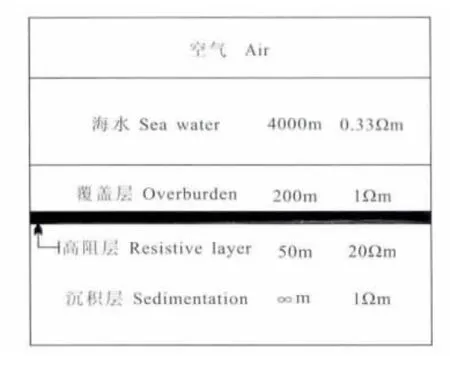
图1 深水环境下的四层地电模型Fig.1 Four-layer model in deepwater environment

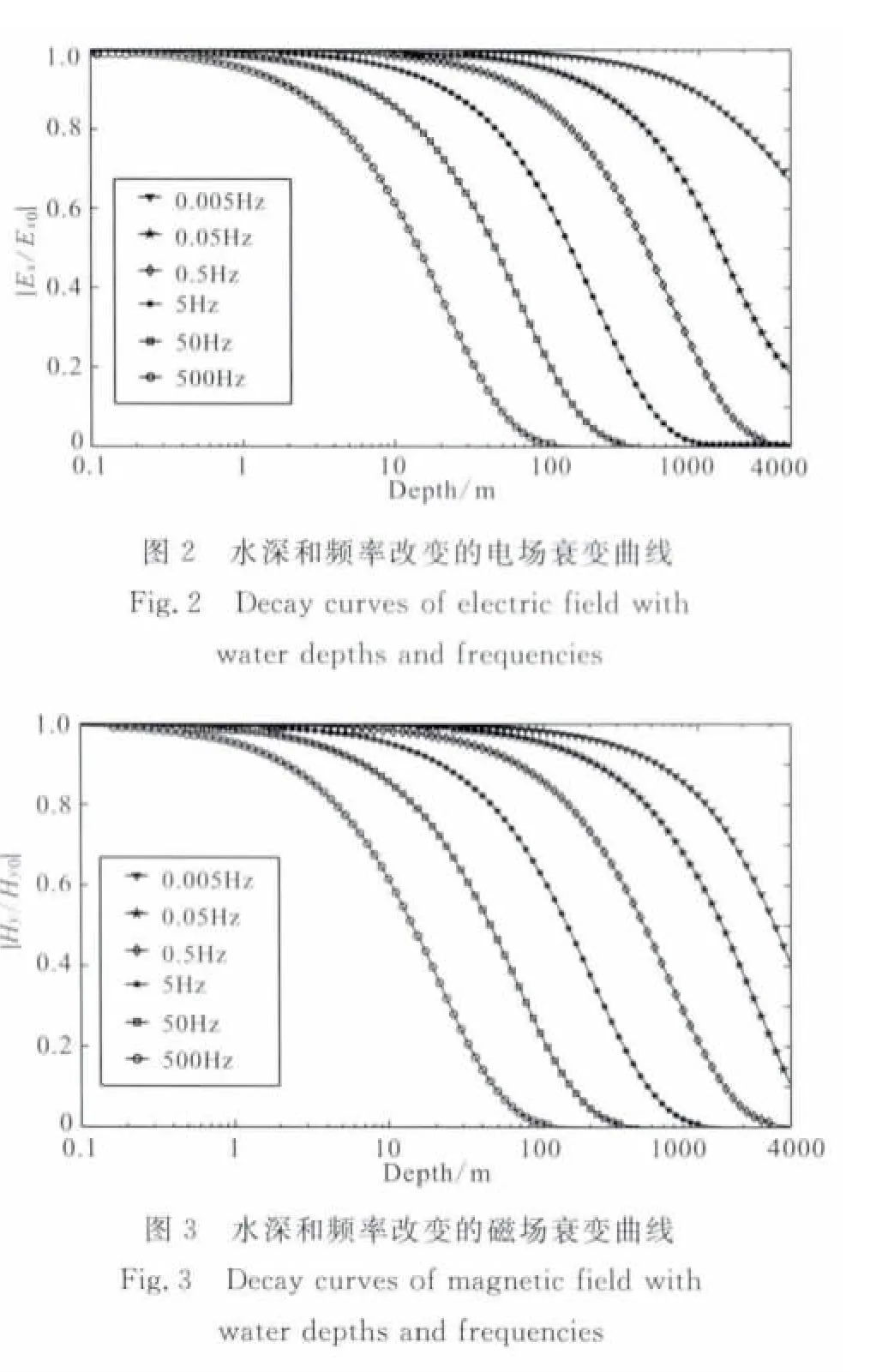
在海平面,即z=0处,由(1)、(2)式得到通滤波器的特征,说明海水对电磁场有衰减作用.注意到,不同频点的场值随水深改变其衰变的幅度也不同,高频分量衰减较快而低频分量衰减较慢.电场或是磁场当频率高于5Hz时,在1000m以深的海水中均难以观测到.这给仪器设计者和从事海上数据采集的技术人员予以提示,在深水(大于1000m)环境中进行大地电磁探测,所获取到的高于5Hz的电磁数据可信度较低.低频分量在深水环境下则相对容易观测,且频率越低,信号幅度相对越高[17].它们的共性还表现在,不管是电场还是磁场,当频率高于0.5Hz时,衰变趋势和相对衰减幅值都近乎一样.除了上述的共性以外,它们还有差异性.电场和磁场在低于0.5Hz以下,各衰减的速度不同.表现为电场衰减较慢,磁场衰减较快.尽管这一点,稍后的分析可以看到,对数据采集的影响程度不大,但这一现象是否会对后续的数据处理带来影响,将另外讨论.
2.3 海水环境中电场与磁场的比值
上面对电场和磁场分别进行分析.而这里,将两者结合一起讨论,具体做法是将(1)式除以(2)式,计算结果示于图4.
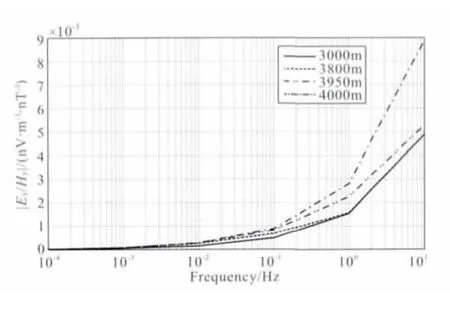
图4 电场与磁场的比值曲线Fig.4 Ratio curves of electric to magnetic fields versus frequency
对图4进行观察,可见电场较磁场幅值小得多.在0.1Hz以下的低频至超低频段,两者幅值相差约三个数量级.在0.1Hz以上至10Hz,两者差别大于两个数量级.这一认识对仪器研制和数据采集有重要指导意义.对仪器研制而言,电场测量灵敏度的指标要求甚高,磁场测量灵敏度的指标可适当放宽.近年来国内的感应式磁场传感器已有明显的技术突破[18],海底磁场测量问题从技术角度看已不是难题,而微弱的电场信号观测成为海底大地电磁探测的关键技术.对数据采集而言,上述的认识意味着,在海底布置采集仪器时,并不需要每一站位都同时观测五个场分量(Ex、Ey、Ez、Hx、Hy).尽管上面的讨论中认为磁场比电场衰减速度稍快,但这一因素与磁场比电场高出三个数量级相比,其权重还是偏小.磁场幅值基数大且不受地形影响,临近观测点的场值变化在小区域范围内可认为一致,因而一个站位的磁场分量可视为等同于临近站位的测量结果.在工程应用方面,一台五分量电磁仪的临近区域,只布置三分量的电场(Ex、Ey、Ez)仪,对保证数据质量和降低投资成本,都具有实际意义.
2.4 仪器上浮速度的计算
海洋MT仪器在海面投放时,配挂重物锚[19],由于其重量大,使整套仪器具有负浮力,重力的作用使仪器自由下沉至海底.数据采集完成后,海面向海底发出声学释放命令[20].海底仪器中的声学释放器受令动作,打开栓紧重物锚的机械挂钩,使仪器脱离栓连,具有了正浮力.受仪器中浮球的提升作用,整套仪器从海底徐徐上浮,返回海面.视水深及浮力大小的不同,上浮到达海面的时间相异.选配多大的浮力以及如何确定仪器的上浮速度,是进行仪器设计的重要技术指标.应注意到,浮力值的选取与海洋作业环境关系甚紧.一般认为,浮力值尽可能选取大一些为好.显然,浮力大使得上升速度快,仪器会较快地返回海面.但是选择仪器的浮力过大会带来负面影响,即,所需配挂的重物锚的重量也要加大,这使得整套仪器在海面投放时操作困难.然而浮力过小,仪器又会出现另外的问题.海底的底流多变,方向和速度都不可控.浮力过小意味着上升速度偏慢,导致海流对仪器上浮过程的影响作用增大,很可能造成仪器偏离预定位置,被海流推走,这种情况会造成仪器丢失.
由此看来,应设计合理的仪器浮力和上浮速度.流体力学的观点认为,物体在水下的运动速度,受推力和阻力的共同影响.仪器从海底返回海面的过程中,其推力来自两方面,一是仪器自身的净浮力,二是海水对仪器的曳引力,而阻力与仪器运动速度的平方成正比[21],根据流体力学和牛顿第二定律,可列出仪器上浮过程的运动方程
式中,Fx为水平方向的曳引力,Fz为净浮力,沿垂直方向;Cd1和Cd2均为曳引系数,与仪器迎水面有关.因其x方向和z方向的形状不同,两个系数有差异,在0.5~1.16之间[22];ρ为海水密度;S为仪器的迎水面积;Vx为水平方向的曳引速度,Vz为垂直上升速度;t为时间;m为仪器在水下的重量(以65kg为例予以讨论).
将(17)式分开为两个分量分别求解,微分方程都有如下的标量形式:

其解为
当海流速度影响较小,只考虑垂直方向运动情况时,可计算出上浮速度与时间的关系曲线.
图5所示的曲线表明,仪器刚脱离重物锚时,起初以加速运动上浮,约两秒钟后趋于匀速,不同浮力其上浮速度不同.理论上,上浮速度越快越好.但工程上,则需要结合实际情况,综合考虑.
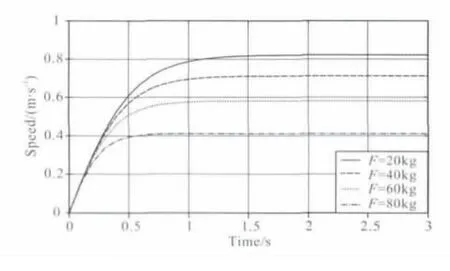
图5 上浮速度与时间的关系曲线Fig.5 Upward floating speed curve in relation to time
3 海底大地电磁仪工作原理
3.1 仪器硬件结构
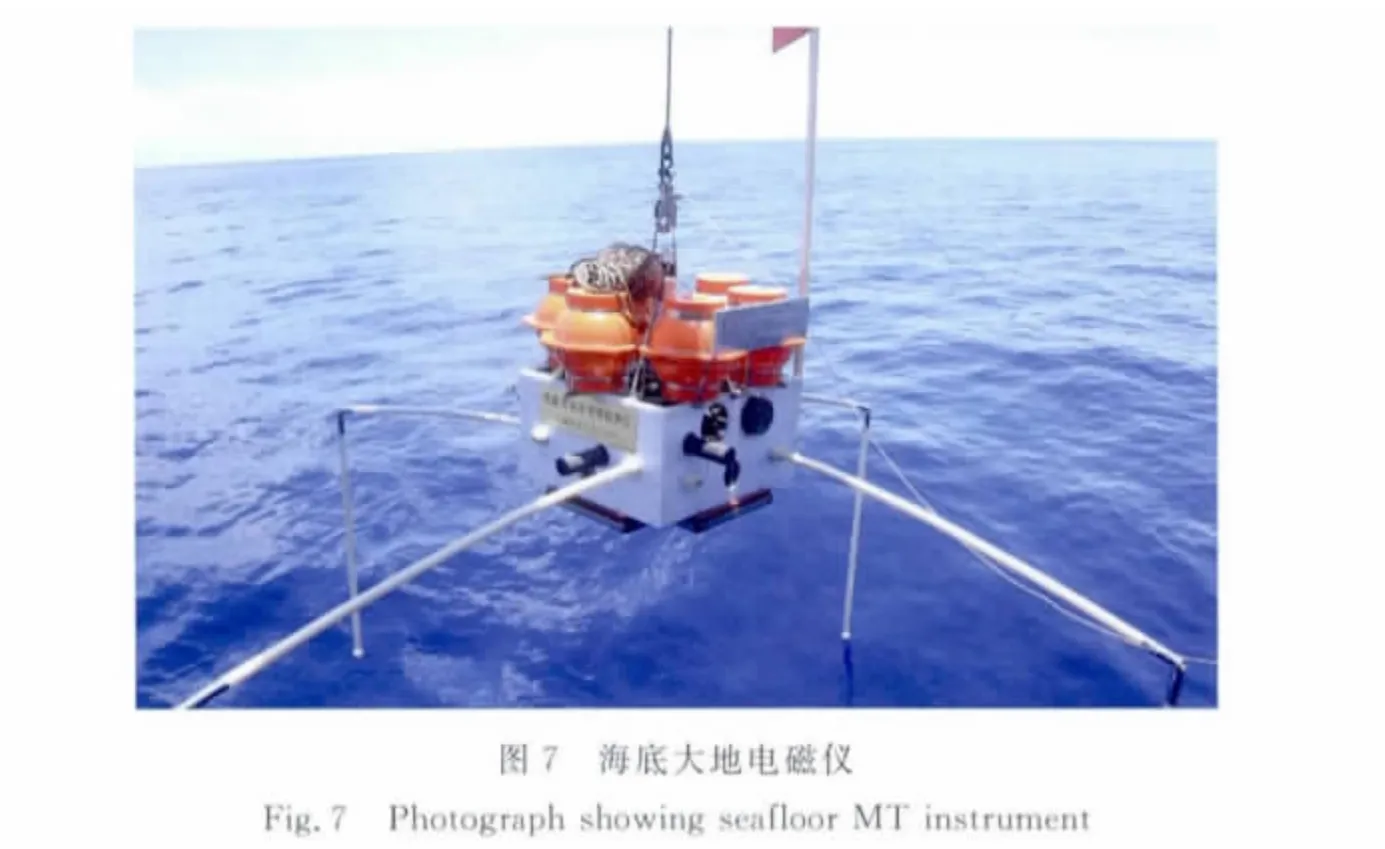
整套仪器由九类集成部件组成,如图6所示,仪器外观示于图7.其中,浮力部件主要是玻璃浮球,给整套仪器提供上升的浮力.起吊部件为提梁,可承受整套仪器在空气中的重量(包括重物锚).在安全保护部件中,牺牲阳极为含锌类的金属片,将其附着在承压舱等部件表面,因其化学性能活泼,海水的腐蚀作用先行反应在牺牲阳极上,因而提高仪器的抗腐蚀能力.助力弹簧安装在聚丙烯框架与重物锚之间,为的是防止软质海泥对仪器的吸附.当声学释放器动作,锚链松开,助力弹簧瞬间释放弹力,推动仪器摆脱吸附,顺利上浮.
信号检测部件由电场传感器、磁场传感器、方位传感器以及姿态传感器等组成[23].其中电场传感器由Ag|AgCl作电极坯体[24],经水密接插件和电缆将海底电场信号传送至数据采集密封舱.每套仪器采集三路相互垂直的电场信号,即Ex,Ey,Ez.目前,Ex、Ey两个水平分量的电极距为10m,垂直分量Ez的电极距为4m.水平分量的4个电场传感器分别由4根电场测量臂(每根长度5m)向4个方向伸展,形成x和y轴的测量桥.磁场传感器为感应式传感器,本仪器只测水平分量的磁场.将磁场传感器装入非磁性承压密封舱中,并将其相互正交安装在聚丙烯框架上.承压密封舱为铝合金材料,其中合金部分有弱磁性,对磁场的中高频成分有一定的衰减作用.当磁场传感器装入舱后,需要对其进行标定以弥补所带来的影响[25].
数据采集部件由采集电路、承压密封舱和相关的水密接插电缆等组成.电路同步采集6通道数据.记录三个分量的电场、两个分量的磁场以及辅助信息,后者包括方位、姿态和舱内温度等.五个分量的电磁信号同步进入各采集通道.经低噪声模拟放大、24位A/D转换,数据进入存储单元.在海底,仪器一般连续工作数天,所采集有效信号频段为0.0003~10Hz,动态范围为120dB.海底与陆地的环境存在较大区别,主要为动态与静态、不可控与可控,这要求电路的可靠性和稳定性较陆地仪器高.在海底测量阶段,仪器处于不可控状态,采集电路如何具备精确测量和数据的完整性,尤为电路设计者关注.连续多天的数据测量和复杂的海况会造成数据丢失.应对措施是对所有被测数据实施备份,即采用两个盘对同一批数据进行存储,其中一个备份盘的物理空间可以小一些.在备份时,按不同的频段,对高采样率的数据进行抗混叠级联分样,然后再存储[26].
本仪器已获得中国发明专利授权[27].
3.2 仪器技术指标
电场观测灵敏度:0.17nV/m/@0.1~10Hz;
磁场观测灵敏度:1pT/@1Hz;
测量频率范围:0.0003~10Hz;
串音抑制比:>80dB;
Ag/AgCl电极本底噪声:1nV/@0.1~10Hz;
最大工作水深:4000m;
方位测量精度:±1°;
倾角测量精度:0.5°;
温度测量精度:1℃.
4 国内首次深水大地电磁数据采集试验
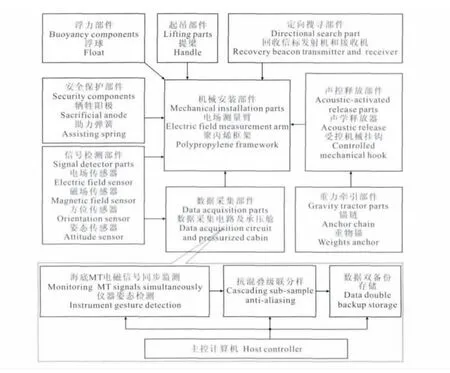
图6 海底大地电磁仪硬件框图Fig.6 Hardware block diagram of seafloor MT instrument
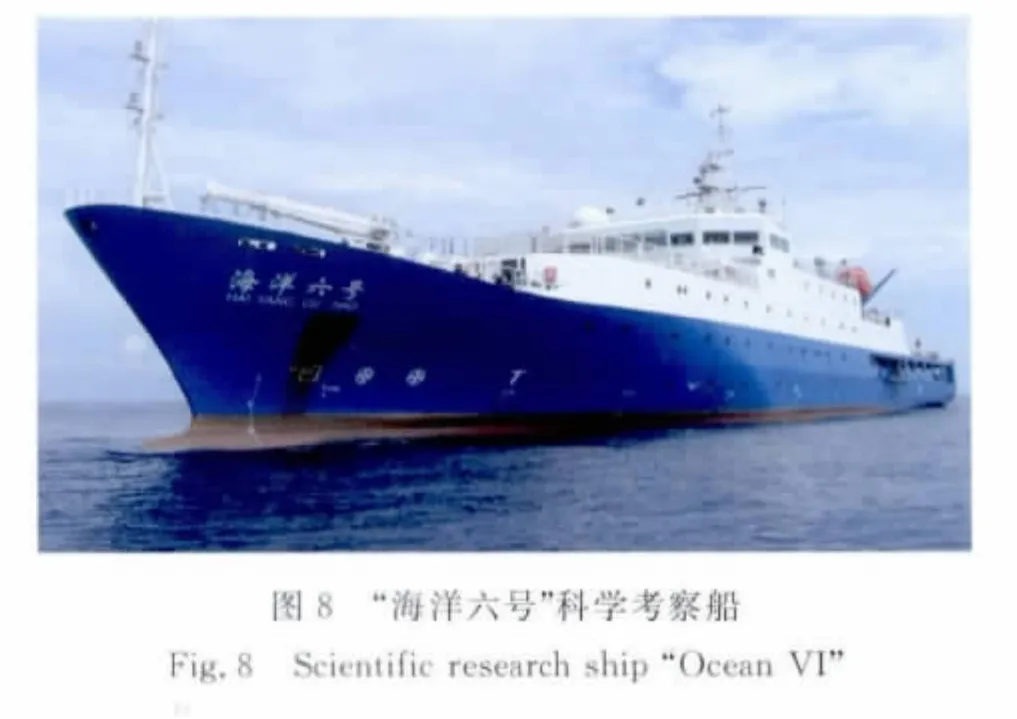
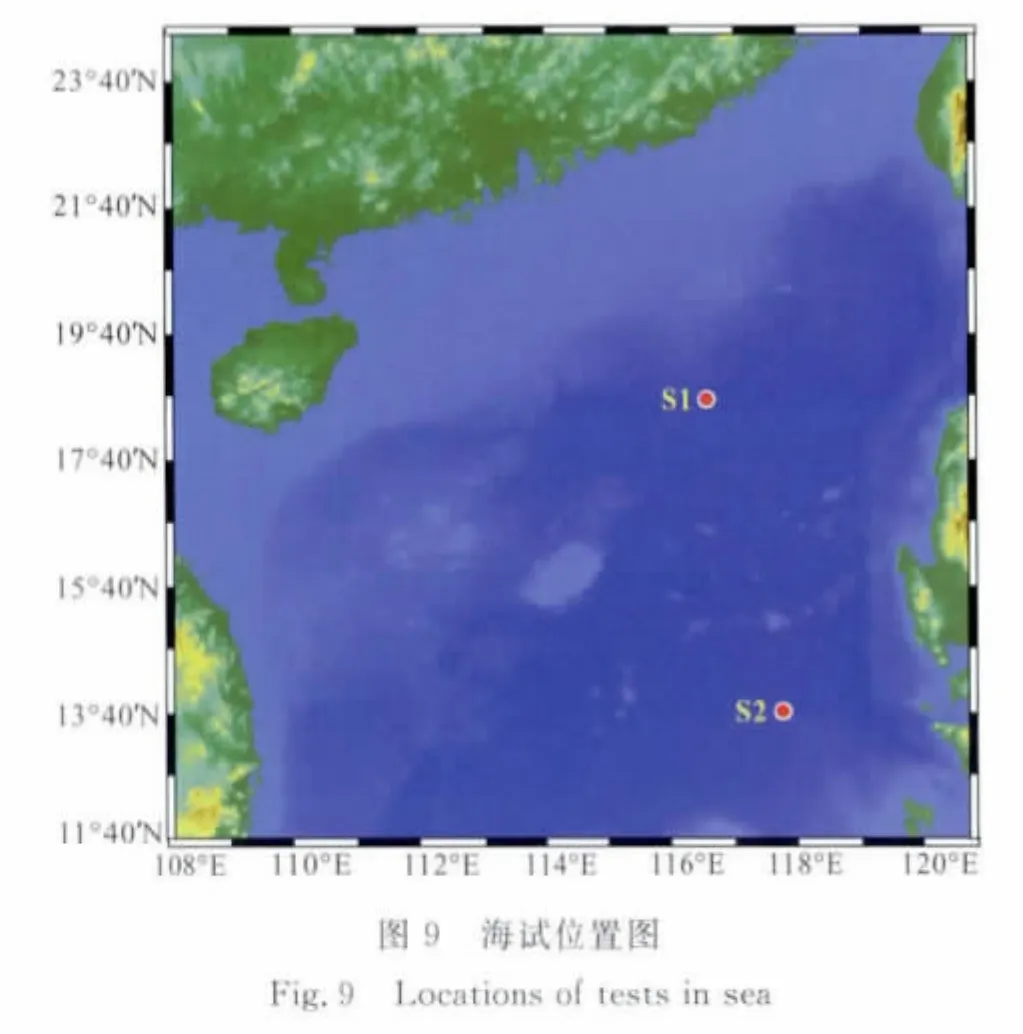
2010年8月至9月,搭载“海洋六号”科学考察船(见图8),在我国南海进行了国内首次深水大地电磁数据采集试验,海试位置如图9所示.试验区水深3700~4000m.
4.1 仪器投放与回收过程
仪器投放前,在船甲板上进行初始化工作.
利用船后部的A型吊,将仪器从甲板上吊起,随后摆出舷外,释放吊缆.当仪器到达海面时,操作员拉动索控脱钩器,使仪器脱离吊钩并自由下沉.每一台仪器的投放时间约半小时.仪器下沉过程中,甲板上可通过声纳通讯监测整个下沉与触底情况.当确认仪器安全抵达预定海底位置,科考船驶离投放点位,进行其他海上调查作业.与陆地勘查施工情况不同,海洋科考船每个航次安排多项调查任务.船一旦出海,全天24h轮班作业.大地电磁试验所占用的船时,只占整个航次的其中一小部分.
当海底的数据采集结束,仪器在原地等待.回收时间由科考船的任务统一安排,并视当时当地的海况而定.在本次海试的回收过程中,从声学释放指令发出至仪器从海底返回海面,历时1小时58分.在近4000m水深的上浮过程中,仪器的垂直上浮速度约为0.57m/s,这与前面的理论计算结果大体吻合.现场的情况还反映,仪器出水位置与投放点位向西南偏离了约1700m,说明仪器在上浮过程中,受海流推曳的影响,产生了水平方向的运动.
4.2 试验结果的解释与评价
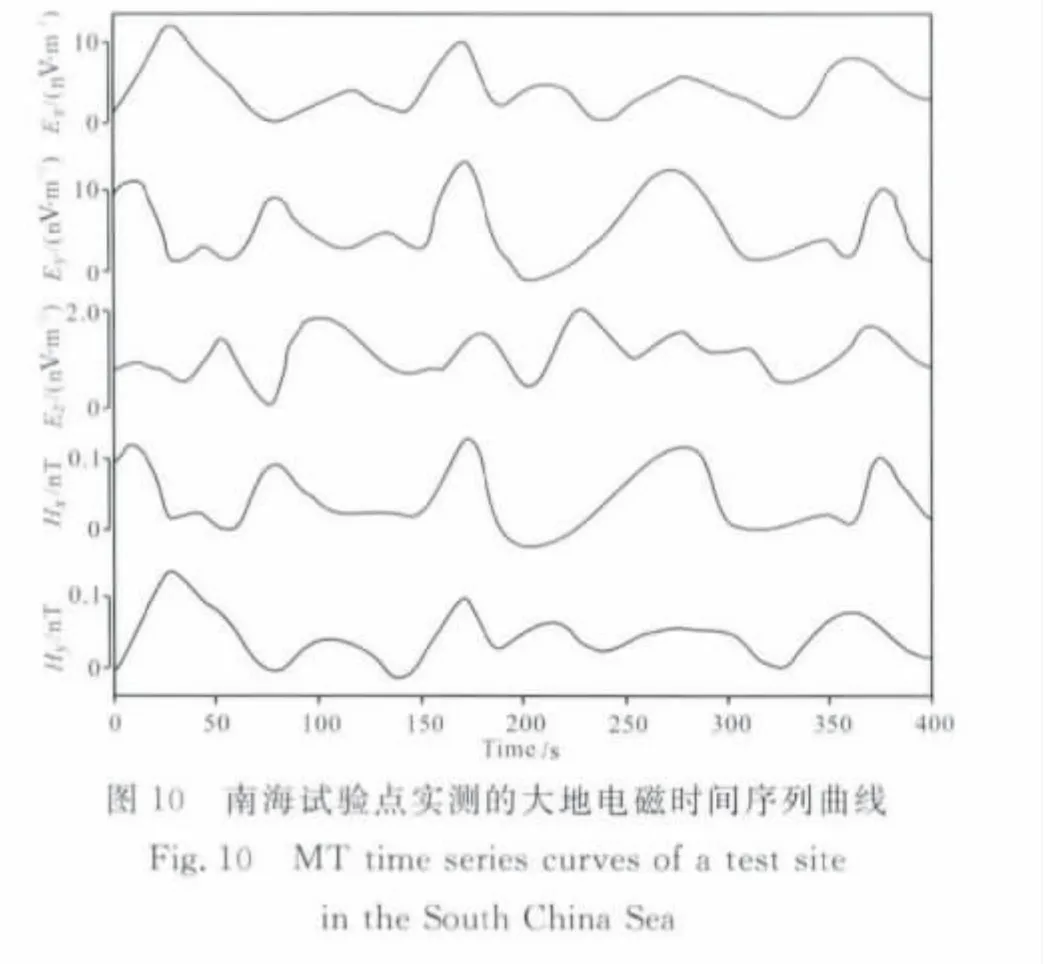
经对本次海试的所有采集数据进行处理,以时间序列曲线和视电阻率曲线作为质量评价依据.
图10为测量结果的时间序列片段.图上的五条曲线从上往下依次为Ex、Ey、Ez、Hx、Hy,所展示的时间段约为6min.大地电磁场属于随机信号,被测对象是来自同一场源,因而当场源变大时,曲线幅值增大,反之则小.这种相关性符合大地电磁场的传播规律.本次数据采集结果的信号统计相关性整体大于70%,说明仪器的采集质量较好.当然,与通常陆地采集的信号相关性相比,上述数值偏低,其主要原因可能来自两个方面.其一,海流推曳且数百个大气压的外部环境;其二,海底信号微弱且电极距只有10m.如何实现海底的采集质量达到与陆地情况基本一致,成为今后仪器优化的目标.
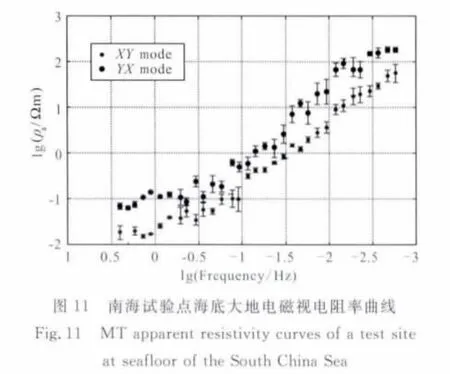
图11为本次海试某测点的视电阻率曲线.从图中看出XY和YX两个模式的视电阻率曲线随频率的变化不重合,表明地下介质表现为非一维结构特征.由于该试验点水深较大,海水对大地电磁场的衰减严重.因而,高于5Hz的信息可信度偏低.图中显示的中高频段的部分视电阻率值低于0.33Ωm,比海水电阻率还低,显然不太符合真实情况.这说明,利用大地电磁方法探测海底的浅部信息有局限性.图11从中频段至低频段信息的可信度较高,其中中频段视电阻率值接近0.5Ωm,随着频率降低,视电阻率呈缓慢增加趋势,曲线的尾支趋近100Ωm.整个测量结果反映出仪器在海底工作基本正常,达到设计要求.
5 结论与展望
(1)海水对大地电磁场具有衰减作用,它相当于一组低通滤波器.不同水深情况下,对同一频率,场值衰减的拐点不同,频率越高,拐点趋向浅表方向,反之,则向深部方向偏移.
(2)频率与深度的对应关系在深水大地电磁探测中得到较好的体现.随着频率从高至低,由浅到深的电性信息顺序显示,高频对应浅部,低频对应深部.
(3)海底大地电磁仪的设计遵循电磁传播规律、深水环境的场值以及上浮速度等理论依据.仪器测量电磁场的五个分量(Ex、Ey、Ez、Hx、Hy)以及方位姿态等数据.将海底测取的时间序列信息进行回放与处理,揭示了测量点位以下的岩石电性,为探测深部地质构造提供了实用的技术手段.
(4)大地电磁方法在海洋的应用中还存在着自身难以解决的技术问题.由于海水对高频电磁波的严重衰减,使得浅部的电性信息难以准确获取.因此,该方法对探测天然气水合物和浅层油气构造的效果欠佳.为解决这一问题,需打开电磁方法的另一扇技术大门——可控源电磁探测(CSEM,Controlled Source Electro Magnetic).目前,我国该项技术的研究已全面启动[28].从浅部至深部,完整精细地获得海底以下介质电磁成像的目标有望在不久实现.
致 谢 感谢“海洋六号”科学考察船全体工作人员对本课题试验工作的支持.
(
)
[1] Larsen J C.An introduction to electromagnetic induction in the ocean.Phys.EarthPlanet.Inter.,1970,7(3):389-398.
[2] Weidelt P.Electromagnetic induction in three-dimensional structures.J.Geophys.,1975,41:85-109.
[3] Filloux J H.Techniques and instrumentation for the study of natural electromagnetic induction at sea.Phys.EarthPlanet.Inter.,1973,7:323-328.
[4] Filloux J H.Ocean-floor magnetotelluric sounding over north central Pacific.Nature,1977,269(5626):297-301.
[5] Cox C S,Filloux J H,Gough D I,et al.Atlantic lithosphere sounding.//Schmucker U.Electromagnetic Induction in the Earth and Moon.Tokyo:Center for Academic Publications Japan,1980:13-32.
[6] Webb S C,Constable S C,Cox C S,et al.A seafloor electric field instrument.J.Geomag.Geoelectr.,1985,37(12):1115-1129.
[7] Constable S C.Seafloor magnetotelluric system and method for oil exploration.US Patent Number:577094,1998.
[8] Nolasco R,Filloux J H,Chave A D.Magnetotelluric imaging of the society islands hotspot.JournalofGeophysicalResearch,1998,103(B12):30287-30309.
[9] Chave A D,Luther D S,Filloux J H.Observations of the boundary current system at 26.5°N in the subtropical North Atlantic ocean.JournalofPhysicalOceanography,1997,27(9):1827-1848.
[10] Evans R L,Tarits P,Chave A D.Asymmetric electrical structure in the mantle beneath the East Pacific Rise at 17°S.Science,1999,286(5440):752-756.
[11] Hoversten G M,Constable S C,Morrison H F.Marine magnetotelluric for base-of-salt mapping:Gulf of Mexico field test at the Gemini structure.Geophysics,2000,65(5):1476-1488.
[12] Barker N D,Morten J P,Shantsev D V,et al.Optimizing EM data acquisition for continental shelf exploration.The LeadingEdge,2012,31(11):1276-1284.
[13] 魏文博.我国大地电磁测深新进展及瞻望.地球物理学进展,2002,17(2):245-254.Wei W B.New advance and prospect of magnetotelluric sounding(MT)in China.ProgressinGeophysics(in Chinese),2002,17(2):245-254.
[14] 邓明,魏文博,谭捍东等.海底大地电磁数据采集器.地球物理学报,2003,46(2):217-223.Deng M,Wei W B,Tan H D,et al.Collector for seafloor magnetotelluric data.ChineseJournalofGeophysics(in Chinese),2003,46(2):217-223.
[15] 邓明,刘方兰,张启升等.海陆联合大跨度多点位海底大地电磁同步数据采集.科学导报,2006,24(10):28-32.Deng M,Liu F L,Zhang Q S,et al.Long-span and Multipoint synchronizing data acquisition for seafloor magnetotelluric based on union of marine and land.Science&Technology Review(in Chinese),2006,24(10):28-32.
[16] 陈乐寿,王光锷.大地电磁测深法.北京:地质出版社,1990:8-10.Chen L S,Wang G E.Magnetotelluric Sounding Method(in Chinese).Beijing:Geological Publishing House,1990:8-10.
[17] 张昆,魏文博,金胜等.海底大地电磁场二维正演TE模式空气层选取.地球物理学进展,2009,24(3):1051-1057.Zhang K,Wei W B,Jin S,et al.The selection of atmosphere of TE mode of seabed 2-D MT forward.Progressin Geophysics(in Chinese),2009,24(3):1051-1057.
[18] 杜刚,魏文博,姜景捷等.ARM嵌入式系统在海底大地电磁信号采集中的应用研究初探.地球物理学进展,2004,19(4):773-777.Du G,Wei W B,Jiang J J,et al.Research and application of ARM-embedded system in the seabed magnetotelluric data acquisition system.ProgressinGeophysics(in Chinese),2004,19(4):773-777.
[19] 邓明,杜刚,张启升等.海洋大地电磁场的特征与测量技术.仪器仪表学报,2004.25(6):742-746.Deng M,Du G,Zhang Q S,et al.The characteristic and prospecting technology of the marine magnetotelluric field.ChineseJournalofScientificInstrument(in Chinese),2004,25(6):742-746.
[20] 邓明,魏文博,余平等.海底大地电磁探测的海洋试验研究.现代地质,2002,16(4):443-447.Deng M,Wei W B,Yu P,et al.The marine experiments of seafloor magnetotelluric prospecting.Geoscience(in Chinese),2002,16(4):443-447.
[21] 周光垌,严崇毅,徐世雄等.流体力学.北京:高等教育出版社,2000:335-337.Zhou G D,Yan C Y,Xu S X,et al.Hydromechanics(in Chinese).Beijing:Higher Education Press,2000:335-337.
[22] 邓明,魏文博,邓靖武等.仿海洋环境下地质勘探仪器的沉放与曳引实验.实验技术与管理,2002,19(6):17-20.Deng M,Wei W B,Deng J W,et al.The geological exploration instrument in imitation of the marine environment Sinking traction experiments.ExperimentalTechnologyand Management(in Chinese),2002,19(6):17-20.
[23] 陈凯,邓明,张启升等.海底可控源电磁测量电路的Linux驱动程序.地球物理学进展,2009,24(4):1499-1506.Chen K,Deng M,Zhang Q S,et al.Design of Linux drivers for seafloor CSMT instrument.ProgressinGeophysics(in Chinese),2009,24(4):1499-1506.
[24] 邓明,张启升,邱开林等.海洋环境下大地电场勘探的若干技术问题.仪表技术与传感器,2004,259(9):48-50.Deng M,Zhang Q S,Qiu K L,et al.Technique problems in marine geoelectrical field prospecting.InstrumentTechnique andSensor(in Chinese),2004,259(9):48-50.
[25] Deng M,Wei W B,Jin S,et al.Experimental verification and research for the distortion in the integrated frequency responses of the high-pressure sealed cabin and magnetic field sensor.EarthScience(JournalofChinaUniversityof Geosciences),2007,18(4):310-319.
[26] 王猛,邓明,张启升等.海底大地电磁探测的实时数据备份技术.地球科学,2007,32(4):511-516.Wang M,Deng M,Zhang Q S,et al.The technique for memorizing acquisition data doubly and simultaneously on the marine magnetotellurics.EarthScience-JournalofChina UniversityofGeosciences(in Chinese),2007,32(4):511-516.
[27] 魏文博,邓明,金胜.海底平面波电磁场探测装置及测量方法.中国专利:ZL 200610080789.2007年11月7日.Wei W B,Deng M,Jin S,et al.Seabed plane-wave electromagnetic field detection devices and methods of measurement(in Chinese).China Patent:ZL 200610080789.2007-11-07.
[28] 邓明,魏文博,张文波等.激励及地电条件与天然气水合物的电偶源电场响应.石油勘探与开发,2010,37(4):438-442.Deng M,Wei W B,Zhang W B,et al.Electric field responses of different gas hydrate models excited by a horizontal electric dipole source with changing arrangements.PetroleumExplorationandDevelopment(in Chinese),2010,37(4):438-442.
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
中学生数理化·高二版(2016年12期)2017-02-28
新高考·高一物理(2016年7期)2017-01-23
中学生数理化·高二版(2016年9期)2016-05-14
Coco薇(2016年1期)2016-01-11
