浅析Trimble HD-GNSS解算引擎
2013-09-28 07:41:56邓永华曹千红张建功
地理空间信息 2013年4期
邓永华,曹千红,叶 飞,张建功
(1.宜都北斗星科技发展有限公司,湖北 宜都443300;2.湖北省土地勘测规划院,湖北 武汉 430071;3.武汉天宝耐特科技有限公司,湖北 武汉 430223)
全球卫星导航系统(GNSS)测量不同于传统测量方法,不受光学传感器通视限制,但GNSS接收机测量受天空可见性约束,因此以往GNSS接收机在茂密树林或建筑密集的区域很难得到cm级的测量解。目前有3个全面运行的GNSS卫星通信系统:GPS,GLONASS和QZSS,还有2个正在积极部署的卫星通信系统Beidou和Galileo。HD-GNSS解算引擎是一种全新的GNSS解算引擎,用以适应新的环境。
1 GNSS基本原理
1.1 定位基本原理
利用距离地面20 000 km轨道上的多颗卫星广播的信号,实现cm级精度定位确实是一件不可思议的事情。但是如果我们知道多颗卫星所在的位置,并能计算接收机与每颗卫星之间的距离,就可以用三角测量法计算接收机位置[1]。
每颗GNSS卫星向接收机广播它所在的位置,提供卫星轨道数据和原子钟时差。可以利用卫星广播的伪随机噪声编码信号计算接收机到各颗卫星的距离。由于信号传播受大气层影响,而且卫星广播的星历表精度低,一台自主定位接收机的位置计算精度仅为1~5 m[2]。为了克服这些主要误差源,实现cm级定位,GNSS接收机需要连接另一个信号源,接收非常精确的卫星位置数据和原子钟时差,用于所有大气层影响的改正。
1.2 差分基本原理
差分GNSS流动站采用参考站接收机提供的数据降低误差,因为2种接收机的误差几乎相同。采用每个卫星信号的载波相位计算流动站与卫星之间的距离,精度可以达到cm级[3]。载波相位的波长比伪随机噪声编码信号的波长小很多。伪随机噪声信号的有效波长由代码位长度决定。对于GPS粗捕捉(C/A)码,伪随机噪声信号的有效波长为300 m,而GPS L1频率的载波波长仅为19 cm[4]。因此,可以用载波相位更精确地计算卫星的距离。
载波相位测量就是比较接收到的信号和接收机内置振荡器发生的等效信号之间的相位差。打开接收机时,接收机时钟相位为零,相对于卫星时钟而言是随机的。在收到卫星信号之后进行首次计算时,只能计算相位差的部分,这部分计算结果加上未知整波长数,就是卫星和流动站天线之间的距离。
2 解算引擎对比
2.1 GNSS传统解算引擎
未知整波长数叫做整周模糊度。为了精确测量距离,处理引擎必须解算此模糊度。传统的GNSS处理引擎用参考数据和流动站数据解算整波长数。在使用这种处理引擎时,解算过程通常为:首先利用伪随机噪声编码和载波相位观测生成浮点解,再执行搜索解算整周模糊度,搜索成功即得到固定解。
浮点解精度主要受伪随机噪声编码影响,所以浮点解质量很差。典型的浮点精度为几dm。在恶劣环境下工作时,浮点解常常要保留相当长时间,然后瞬间切换到固定解。因此从浮点解到固定解收敛发生分化的可能性很高。采用浮点/固定法解算整周模糊度有很多缺点:①在接收机找到固定解之前,用户不能得到可用位置;②如果处理引擎选择一组错误的整周模糊度,解算就会出错;③在重新搜索之前不能使用正确的整周模糊度,会把位置误报为离群位置,并持续很长时间(见图1)。

图1 传统解算引擎形成错误固定解
2.2 HD-GNSS解算引擎
最初的测量GPS接收机只能跟踪2个卫星频段GPS L1和L2,当前已经能够跟踪GPS系统L1(1 575.42)、L2(1 227.60)、L5(1 176.45),GLONASS 系统 L1(1 602+0.562 5*N)、L2(1 246+0.437 5*N),GALILEO系 统 E1(1 575.42)、E5(1 191.795)、E5a(1 176.45)、E5b(1 207.14),QZSS 系 统 L1(1 575.42)、L2(1 227.60)、L5(1 176.45)、LEX(1 278.75),Beidou 系 统 B1(1 561.098)、B2(1 207.14)、B3(1 268.52) 等16个 GNSS频 段。HDGNSS处理引擎在模糊度解算技术上变化很多,充分运用了现有的GNSS卫星通信系统,可以利用至少5颗通信卫星的多频数据解算整周模糊度。后续RTK点可以使用仅2个历元的测量数据实现cm级精度,处理引擎可连续解算整周模糊度。
在以往RTK系统里,初始化表示从浮点解过渡到固定解的过程[5],而在HD-GNSS处理引擎里,初始化指连接参考站到得出cm级精度解整个过程。HDGNSS处理引擎完全抛弃了传统处理引擎的“固定”“浮点”概念,在测量时,外业不再有“固定”或“浮点”字样,一旦得出可靠精度,就显示RTK字样(见图2)。
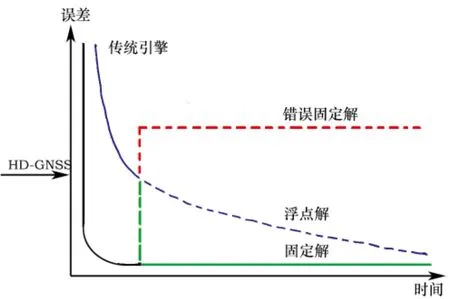
图2 HD-GNSS处理引擎与传统引擎对比
2.3 实测数据对比
测试使用Trimble R10和Trimble R4GNSS接收机;R4 使用传统GNSS处理引擎,Maxwell-5 GNSS芯片,72个通道可跟踪GPS、GLONASS、SBAS卫星信号;R10使用HD-GNSS处理引擎,Maxwell-6 GNSS芯片,440个通道可跟踪GPS、GLONASS、Galileo、Beidou、QZSS、OmniSTAR、SBAS卫星信号。
2款接收机在恶劣环境下,测量同一点1 200次误差对比统计如表1所示。
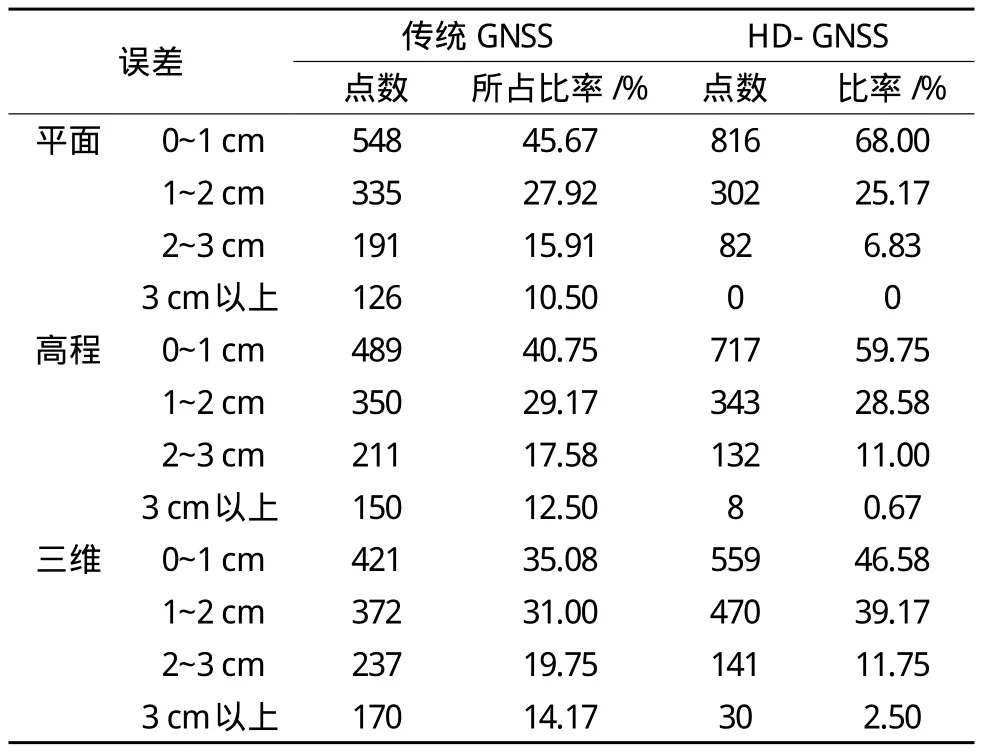
表1 测量数据误差统计表
3 结 语
通过实测数据可以看出,在恶劣的测量环境下,传统GNSS处理引擎与HD-GNSS处理引擎表现出来的差距很明显。传统GNSS处理引擎在多路径效应等不利测量条件下,所解算的点的精度无法保证,会出现个别点偏差较大的情况,而HD-GNSS处理引擎则能很好地解决这个问题。
[1]张正禄.工程测量学[M].武汉:武汉大学出版社,2005
[2]宁津生,刘经南,陈俊勇,等.现代大地测量理论与技术[M].武汉:武汉大学出版社,2006
[3]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,1998
[4]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005
[5]JAMES Bao-yen Tsui.Fundamentals of Global Positioning System Receivers -A Software Approach[M].John Wiley &Sons,Inc,2000
[6]魏二虎,黄劲松.GPS测量操作与数据处理[M].武汉:武汉大学出版社,2004
[7]孔祥元,梅是义.控制测量学[M].武汉:武汉测绘科技大学出版社,1998
[8]杨华先,李剑,魏忠.HBCORS参考站图形结构及位置[J].地理空间信息,2011,9(6):12-14
猜你喜欢
导航定位学报(2022年2期)2022-04-11 03:17:34
铁道通信信号(2019年4期)2019-10-10 03:42:38
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
商周刊(2017年22期)2017-11-09 05:08:31
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
河南电力(2015年5期)2015-06-08 06:01:46
电测与仪表(2015年18期)2015-04-12 00:45:24
皖西学院学报(2015年5期)2015-02-28 17:52:46