基于多路摄像的视频运动目标智能分析系统*
2013-09-28 03:24:14方道恒
电讯技术 2013年11期
方道恒,陈 超,舒 畅
(1.电子科技大学通信学院,成都610054;2.总参陆航部驻成都地区军事代表室,成都610036)
与雷达、激光等技术手段相比,视频运动目标智能分析技术具有其直观性、隐蔽性好、抗干扰能力强、低空探测、跟踪性能强等特点。该技术目前主要应用于轻武器和火炮的弹着点定位与分析,应用于导弹的弹着点定位及其毁伤性能分析尚未见文献报道。该技术有利于提高导弹靶场信息化建设水平和安全性。为此,本文设计了一套视频运动目标智能分析系统,并进行了测试实验,结果表明,该系统精度高,实时性强,具有较高的实用价值。
1 总体架构
本文设计的系统由3个观测点(如图1所示)和一个后端信息融合处理点构成。每个观测点作为前端视频获取点,视野覆盖目标预定出现空域,其功能一是将目标空域周边景象视频及目标图像实时传递给后端,二是对目标进行智能分析,并将相关信息传给后端信息融合点。
后端信息融合点则负责接收前端点的视频及相关信息,并综合多路信息进行最终的融合决策、多路摄像机协同调度和视频显示的选择。整体设计结构如图2所示。
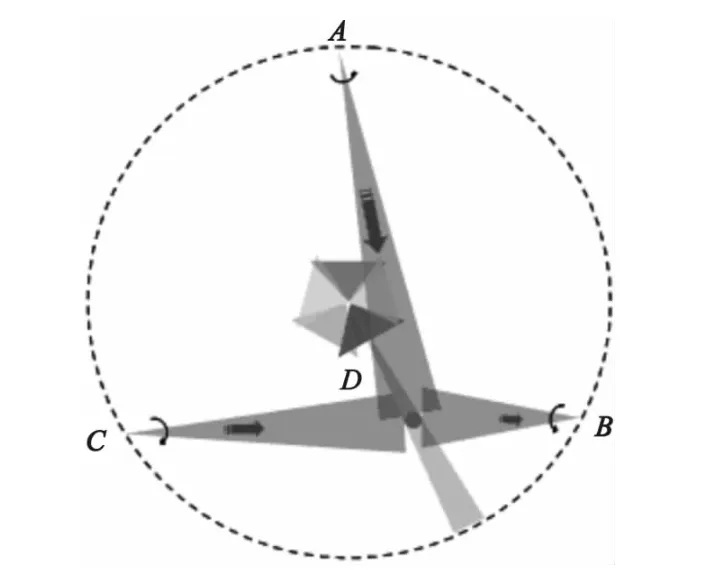
图1 前端观测点设置示意图Fig.1 Fore-end observation point diagrammatic sketch
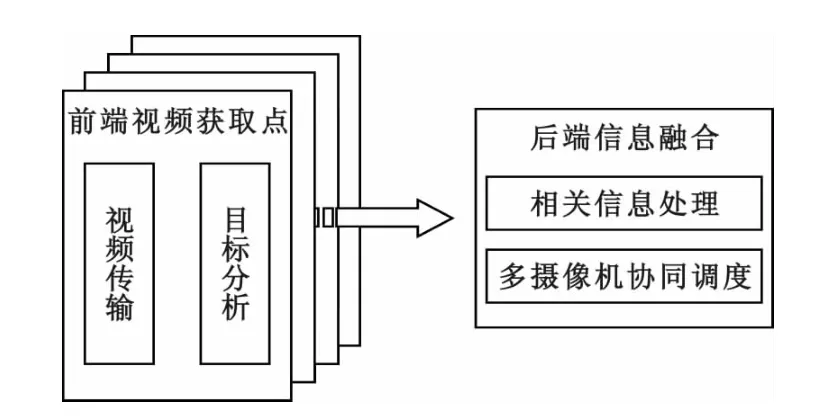
图2 系统总体架构Fig.2 System overall architecture
2 多路摄像机协同调度技术
如图1所示,本系统中采用在每个观测点设置两台摄像机来获取目标景象,但受实际的传输和显示设备限制,只能选择这些摄像机中很少一部分的视频图像进行实时显示。如何协同控制这些摄像机,使得最终被选择出来进行目标景象显示的摄像机同时拥有最佳的视野和目标分辨率就成为了需要深入研究的问题。我们采用博弈论,通过适当选择效用函数和协商机制来解决该问题。一个多摄像机系统可以看做一个由多个局中人(Multiplayer)组成的学习协商机制,首先从理论角度对其进行分析。
假设在靶场区域中有Nt个目标,同时有Nc个摄像机,{T}为目标的集合,也就是博弈理论中的对手。判断一个对手是否退出博弈,取决于它是否能够被摄像机在指定分辨率的条件下监控到。每个摄像机Ci能够根据效用函数UCi(ai)选择最优的设置ai,ai可以看作摄像机可调参数。于是,整个系统的优化问题转化为博弈论中效用函数的选择问题,如何选择适当的效用函数来满足系统整体性能的要求,成为解决问题的关键。
系统效用函数分为目标效用函数、整体效用函数和摄像机效用函数。目标效用函数为

其中,A=∪iai,表明摄像机Ci参数的集合,Vl为目标的观测系数,pil的定义如下:

其中,r0是能接受的最小目标分辨率,而rmax是最大目标分辨率。若ril表示目标Tl被摄像机Ci观测到的分辨率,那么xil=ril/rmax。参数λ可以根据单摄像头跟踪算法的要求进行相应调整。
整体效用函数可以通过目标效用函数得出,如下式:

摄像机效用函数为
其中,a-i=A-ai为除去Ci后所有摄相机的集合。纳什均衡(Nash Equilibrium)是博弈论中一个广为人知的概念,在本问题中,达到纳什均衡的具体表现为任何一个摄像头通过改变自身参数,都不能够使得效用函数得到增加,也就是说此时系统达到了最佳状态。可以证明,以上提出的效用函数可以达到纳什均衡。
以上是对博弈论框架的阐述,使用该框架的主要目的在于在目标监控性能和区域覆盖能力之间找到一个折衷。对于目标的跟踪还需要一个协同机制。对于摄像机的选择,采用如下策略:
从所有摄像机中随机选取一个摄像机,只有这个摄像机才有改变自身参数的权限。假设我们需要对目标以rh的分辨率进行拍摄。若摄像机Ci被赋予更新参数的权限,Ci需要首先确定自己通过改变参数能否达到系统要求,若不能够达到,Ci仅仅优化自身参数,使自身的效用函数达到最大;反之,若Ci能够达到系统的要求,Ci根据需要改变自身参数,跟踪目标。若Ci在跟踪目标的过程中不能够改变自身的参数以达到系统要求,Ci发出交接信号,系统会在其他相机中随机选取一个来进行跟踪,跟踪步骤和Ci相同,同时Ci放弃对目标的跟踪,继续改变参数最大化自身的效用函数。该多摄像的协同调度机制如图3所示。
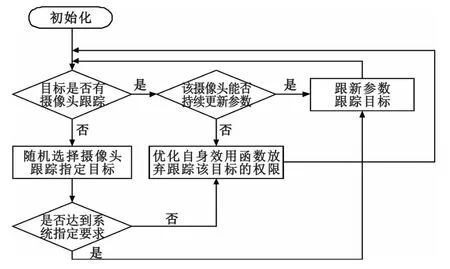
图3 多摄像机协同机制Fig.3 Multichannel camera coordination mechanism
通过这样一种简单的方法,可以为每个目标找出一个最优摄像机,在该摄像机上运用跟踪算法,对目标进行跟踪。
我们使用Matlab对摄像机协同调度算法进行仿真。在Matlab平台上模拟10个PTZ摄像头,在预设好摄像头参数情况下,对若干目标进行跟踪,如图4所示。

图4 多摄像机协同机制仿真Fig.4 Multichannel camera coordination mechanism simulation
图4 是协同机制仿真的情况,图中的白色方块代表感兴趣目标,而圆点代表对该目标监控的摄像头,由圆点所发出的射线中间的阴影部分是该摄像头的视野范围。图4是在29时刻和59时刻系统运行的效果。
图5是监控系统视野覆盖率及目标分辨率的示意图。我们设定目标区域为600个单位面积,最大分辨率为240个单位像素。可以看出,该方法能够在保持相对较高的目标分辨率基础上,很好地协调视野范围。仿真证明该方法行之有效。

图5 系统视野及分辨率Fig.5 System visual field and resolution
3 视频信息处理流程
视频图像信息处理流程主要由预处理、目标检测和目标跟踪以及高级信息处理等部分组成,如图6所示。
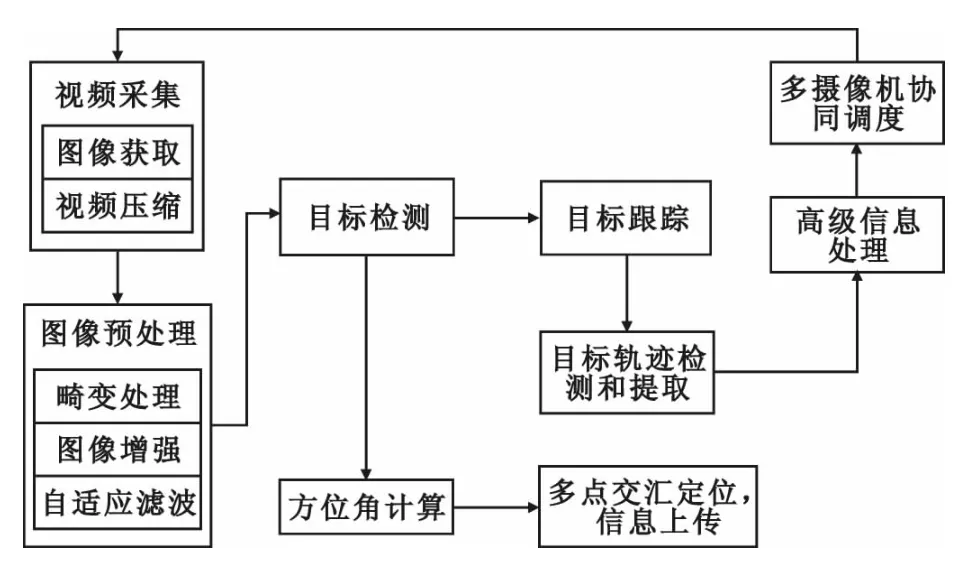
图6 视频信息处理流程Fig.6 Flow chart of video information processing
3.1 图像预处理
在实际应用中,系统获取的原始图像不是完美的。对于系统获取的原始图像,由于噪声、光照等原因,图像的质量不高,所以需要进行预处理。本系统的图像预处理主要包括视频图像校准、图像增强、自适应滤波、图像灰度化、类直方图均衡的光照预处理。
3.2 图像检测
在众多的背景减除算法中,本方案选择了基于一致性和随机性思想的ViBe背景建模算法,该算法具有计算简单、实时性和鲁棒性较高等特点。ViBe算法使用第一帧视频图像并根据图像像素的空间一致性初始化背景建模。ViBe方法把样本值的生命周期策略加入算法中,全面增加了检测质量。
3.3 运动目标跟踪技术
持续提供准确而高质量的目标信息是目标跟踪技术追求的目标。目前国际上广泛采用的跟踪框架主要有两类,一是基于目标模式的跟踪,二是基于目标状态估计的跟踪。基于运算速度的考虑,本系统采用第一种框架所对应的代表性算法——均值偏移算法(Mean-Shift算法)。
在目标跟踪方面,基于Mean-shift基本理论,经过目标建模、相似度测量以及Mean-shift搜索3个步骤,可以完成均值偏移目标跟踪的过程。
对于目标建模过程,一般采用归一化直方图作为基本的目标建模方法。目标被表现为如下模型:


其中,y0为候选目标的位置。
目标的相似度测量方法一般采用Bhattacharryya距离,具体定义如下:


其中,右边第一项为常数,要求得ρ(y)的最大值,就要求得的最大值。因此,计算第二项的梯度:
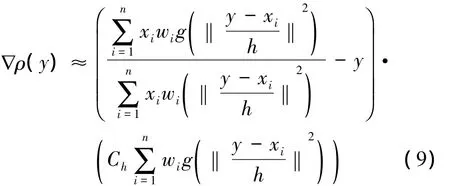
其中,g()=-k'()。我们知道,当一个函数梯度为0时,就是该函数的最大值。因此,令"ρ(y)为0,假设采用Epanechnikov核函数,上式右边第一部分可化简为
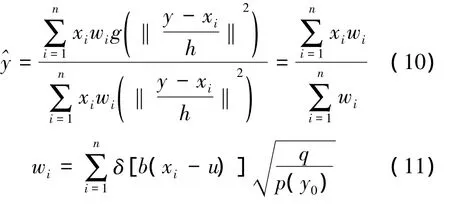
这样,就完成了Mean-Shift算法的理论模型。均值偏移算法的流程图如图7所示。
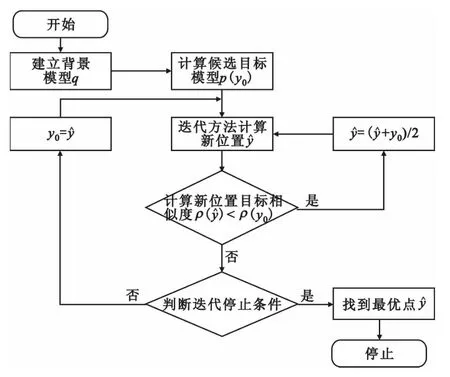
图7 Mean-Shift跟踪算法流程Fig.7 Flow chart of Mean-Shift tracking arithmetic
3.4 后端信息处理
3.4.1 视频运动目标方位角计算方法
如何在大区域的空中计算导弹末段的方位角,是定位弹着点和评估其毁伤性能的重要参数,为此我们提出如下计算方法:
(1)采用差分GPS,分别测量摄像机C、参考标K1和参考标K2相对于中心标O的地理坐标;
(2)在摄像机采集的视频图像里通过人工点击分别获取参考标K1的像素横坐标u1和参考标K2的像素横坐标u2。
假定使用目标检测算法模块获取的目标X的落点像素横坐标为x,则由公式其中α为参考标K1、摄像机C、参考标K2所成的夹角∠K1CK2)可求得β(β为参考标K1、摄像机 C、目标X所成的夹角),β即可阐释目标的方位角。
3.4.2 目标落点位置计算方法
对落点位置的计算,最少需要两路视频(两路视频观测点机位与落点位置三点不共线)即可计算得到落点的大地坐标。由于涉及到的视频路数较多,且视频清晰度、观测设备与落点的距离差异很大,因此在计算落点时既要利用多路信息进行最小二乘求解,又需要根据视频清晰度、观测点机位与落点之间的距离远近对多路视频检测提供的信息进行加权,而这其中必然也会涉及到从“粗”到“精”的两级或多级计算。目标落点位置算法过程及其描述如下:
(1)设某观测点摄像机地理坐标为Ci(利用差分GPS测得)、该观测点检测到的目标方位角θi,则可以求得大地平面上过观测点与目标落点的直线方程,记为Aix+Biy+Ci=0;

结合从各观测点到落点的射线方向,排除虚假交汇落点后,设剩余K个交汇落点Li,i=1,2,…,K;
(3)设d(·)、F(·)分别是距离函数和给定的代价函数,P(L1,L2,…,LK)是 K个交汇落点构成的凸多边形,则最终落点通过解如下最优化问题得到:

4 结论
实验结果表明,基于多路摄像的视频运动目标智能分析系统具有测量区域大(观测点与靶心的距离半径不小于1500 m)、实时性强(在1 s内发现目标,算出目标相关信息,并在指挥大厅大屏幕上显示该信息,如位置、运动路径、破片散落半径等性能指标)、导弹毁伤性能评估较为精确、误差小等特点,具有较高的实用价值。
[1]起峰,陆宏伟,刘肖琳.基于图像的精密测量与运动测量[M].北京:科技出版社,2002.QI Feng,LU Hong-wei,LIU Xiao-lin.Precision measurement and movement measurement based on image[M].Beijing:Science Press,2002.(in Chinese)
[2]任明艺,李晓峰,李在铭.运动视频对象的时空联合检测技术[J].光电子·激光,2009,20(7):64-68.REN Ming-yi,LI Xiao-feng,LI Zai-ming.Space-time Joint detection technology based on movement video target[J].Opto- Electronic Laser,2009,20(7):64 -68.(in Chinese)
[3]ZHOU Ning,LI Xiao-feng,LI Zai-ming.Dim Target Detection Based on Spatio-morphological and Wavelet Transform Clutter Suppression[J].Opto-Electronic Engineering,2009,36(11):25-28.
[4]Fu Zhizhong,Liu Lingqiao,Xian Haiying.Human Computer Interaction Research and Realization Based on Leg Movement Analysis[C]//Proceedings of 2010 International Conference on Apperceiving Computing and Intelligence Analysis.Chengdu:IEEE,2010:421-426.
[5]Fu Zhi-Zhong,Xian Hai-Ying,Xu Jin,et al.Evaluation of Motion Blur Parameter Based on Cepstrum Domain of the Intentional Restored Image[C]//Proceedings of 2010 International Conference on Computational Problem-solving.Lijiang:IEEE,2010:271-274.
[6]谢征宇.高铁综合客运枢纽客运安全预警关键技术研究[D].北京:北京交通大学,2012.XIE Zheng-yu.Research on Key Technologies of Passenger Flow Safety Forewarning of High-speed Railway Comprehensive Passenger Transport Hub[D].Beijing:Beijing Jiaotong University,2012.(in Chinese)
[7]姜明新.智能视频监控中的目标跟踪技术研究[D].大连:大连理工大学,2013.JIANG Ming-xin.Research on Object Tracking Technology in Intelligent Video Surveillance[D].Dalian:Dalian University of Technology,2013.(in Chinese)
[8]付博.智能监控分析系统中的若干个关键问题研究[D].吉林:吉林大学,2013.FU Bo.Several key problems research on intelligent moni-toring analysis system[D].Jilin:Jilin University,2013.(in Chinese)
[9]袁国武.智能视频监控中的运动目标检测和跟踪算法研究[D].大理:云南大学,2012.YUAN Guo-wu.Research on Moving Objects Detection and Tracking Methods in Intelligent Visual Surveillance System[D].Dali:Yunnan University,2012.(in Chinese)
[10]郝捧华,龚国庆,陈勇.双目视觉图像处理算法的优化[J].北京信息科技大学学报,2012,27(5):64-67,72.HAO Peng-hua,GONG Guo-qing,CHEN Yong.Algorithm optimization of binocular vision image processing[J].Journal of Beijing Information science and Technology University,2012,27(5):64-67,72.(in Chinese)
[11]周维.视频监控中运动目标发现与跟琮算法研究[D].北京:中国科技大学,2012.ZHOU Wei.Research on Algorithms of Moving Object Discovering and Tracking for Video Surveillance[D].Beijing:University of Science and Technology of China,2012.(in Chinese)
猜你喜欢
成都大学学报(自然科学版)(2021年1期)2021-05-22 01:31:20
智能城市(2021年3期)2021-04-12 04:40:50
空间科学学报(2021年6期)2021-03-09 06:20:16
绿色科技(2019年12期)2019-07-15 11:13:02
铜仁学院学报(2018年6期)2018-07-05 09:47:50
经济研究导刊(2016年30期)2016-12-24 08:08:52
太空探索(2016年12期)2016-07-18 11:13:43
新闻传播(2016年4期)2016-07-18 10:59:21
公民与法治(2016年10期)2016-05-17 04:12:52
水利科技与经济(2016年10期)2016-04-26 08:39:58