
实拍运动模糊图像的退化参数估计与复原
2013-09-27 09:56:10郭红伟田益民
激光与红外 2013年5期
郭红伟,付 波,田益民,李 娟
(1.红河学院工学院,云南蒙自661100;2.湖北工业大学电气与电子工程学院,湖北武汉430068;3.北京印刷学院基础部,北京102600)
1 引言
在图像摄取过程中,被摄景物与成像设备之间的相对运动造成图像模糊是一种很常见的退化现象。对运动模糊图像复原技术的研究是图像复原领域中重要的研究课题之一,随着研究的不断进步,出现了一些行之有效的算法和方法。但在不同的情况下,这些方法具有不同的复原效果。因为这些方法是研究者假定图像退化过程具备一定的前提条件下提出的,而实际拍摄的运动模糊图像,并不一定完全具备这些方法的前提,或者是只具备其部分前提。
退化图像的复原关键在于点扩散函数(point spread function,PSF)的准确鉴别,运动模糊退化的PSF由模糊方向和模糊尺度两个参数确定。大多数针对运动模糊退化的研究假定退化过程为理想的匀速直线运动,Cannon[1]利用运动模糊图像在频域空间的周期零点特性,提出频域方法来估计PSF参数。随后,针对频域方法出现了许多改进算法[2-7]。文献[2]用Radon变换检测频谱中暗、亮条纹估计运动模糊方向;文献[3]在文献[2]基础上增加对频谱的二值化处理,提高了模糊方向估计精度;文献[4]在频域用相关系数法鉴别运动模糊方向和模糊尺度;文献[5]分析频谱中暗条纹位置与模糊尺度的关系,用投影法估算模糊尺度。这些算法都只适用于图像长、宽相等的情况,文献[6]、[7]分析了图像长、宽不等时,运动模糊图像频谱暗条纹分布的规律,适用于不同尺寸比率退化图像的参数估计;文献[7]对频普做边缘检测后估算运动模糊方向的方法提高了估计精度。近年来,还出现了基于退化图像倒谱的运动模糊PSF估计方法[8-10],由于倒谱特征不受图像尺寸影响,这些方法能适用于不同尺寸比率退化图像的参数估计。文献[8]通过对退化图像的倒谱图实施灰度变换,运用Canny边缘检测提取倒谱特征估算PSF参数。文献[9]、[10]利用倒谱具有左右对称的性质,取倒谱的右半平面自动检测灰度极小值(为负数)点的坐标,采取几何运算方式估算PSF参数。对于仿真运动模糊图像的参数估计,以上这些算法都取得了较好的效果。然而,实拍运动模糊图像绝大多数都不是理想的匀速直线运动模糊,其频谱中条纹信息很微弱,而且还出现了十字亮线。以上算法匀无法正确估计出实拍运动模糊图像的PSF参数,针对这一问题,本文提出一种适用于实拍运动模糊图像参数估计和复原的方法。对大量相机实拍退化图像的参数估计及复原,证明该方法是有效的。
2 理想运动模糊图像的分析
线性位移不变系统中,图像的退化过程描述为:

式中,“*”表示空间卷积;h(x,y)是退化系统的点扩散函数(PSF);f(x,y)是原始图像;n(x,y)是加性噪声;g(x,y)是退化图像。对式(1)做傅里叶变换得图像退化过程的频域描述为:

式中,G(u,ν),H(u,ν),F(u,ν),N(u,ν)分别是退化图像、PSF、原始图像、加性噪声的傅里叶变换。
若不考虑噪声的影响,则退化过程表示为:

对式(3)取对数后求博里叶逆变换得退化图像的倒谱描述为:

对于匀速直线运动模糊图像来说,点扩展函数可以描述为:

式中,L为模糊尺度;θ为运动方向与x轴正向夹角。
对匀速直线运动模糊图像的傅里叶变换[7]和倒谱变换[10]分析可得:在匀速直线运动模糊图像的频谱中存在有规律的亮、暗条纹,图像长宽相等时,暗条纹方向与运动方向垂直,且相邻两暗条纹间距与模糊尺度成反比;在倒谱中沿运动方向有一条亮带,亮带上两个负峰值点距离刚好为模糊尺度的两倍。很多文献[1-11]就是基于以上频谱和倒谱的特征设计和改进算法的。图1(b)所示是对图1(a)Lena作模糊尺度为20像素、模糊角度为45°的仿真模糊图像,图1(c)~图1(e)是其对应的频谱、倒谱和倒谱三维图。为了突出倒谱特征,图1(d)、图1(e)是对倒谱长、宽进行剪裁,且人为降低中心点灰度值后的效果。
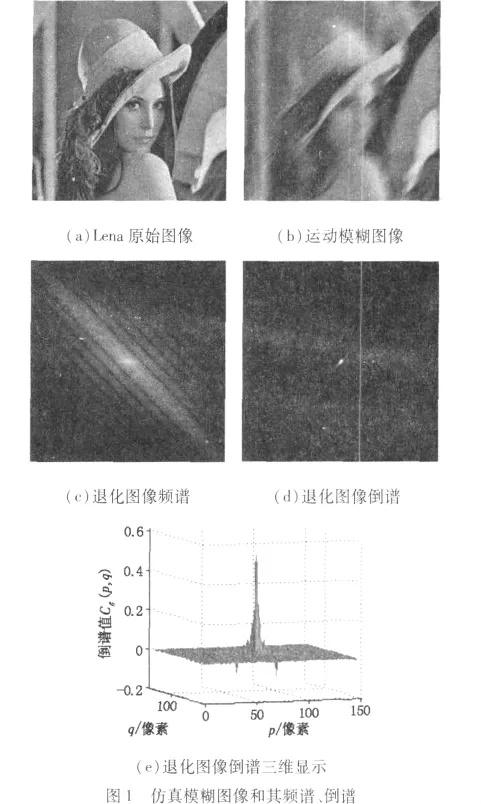
图1(c)~图1(e)显示,理想匀速直线运动模糊图像的频谱和倒谱特征非常清晰。所以,针对仿真运动模糊图像的PSF参数估计,大部分算法都能取得较好的效果。
式中:CT是BFS的温度系数,Cε是BFS的应变系数,vB,T0,ε0是在参考温度T0、参考应变ε0下的初始Brillouin频移。
3 实拍运动模糊图像的分析
用相机拍照时手的抖动或被摄对像的移动,以及在快速移动的飞行器上进行拍摄等,均会获得运动模糊图像。这些方式获取的模糊图像一般都不是理想匀速直线运动模糊,其频谱中的亮、暗条纹和倒谱中沿运动方向的亮带被其他信息干扰或掩盖。而且,实际中因相机成像空间固定,所得模糊图像较理想模糊图像在四周必存在一定的边缘截断。事实上,正是因为陡峭的边缘截断破坏了边缘附近的卷积关系,使得退化过程不是一个完全卷积,最终导致实拍模糊图像在频谱和倒谱中还出现了十字亮线[11]。图2所示为相机实拍的运动模糊图像和其频谱、倒谱,由于倒谱信息非常微弱,图2(d)是进行剪裁和降底中心点灰度值后的显示效果。

图2 实拍模糊图像和其频谱、倒谱
比较图2(c)、图2(d)与图1(c)、图1(d)可见,实拍运动模糊图像的频谱和倒谱并不具备仿真图像的特征。实拍图像频谱中暗条纹基本无法辨识,且出现较强的十字亮线;倒谱中沿运动方向的亮带非常微弱,几乎被十字亮线完全掩盖。
4 实拍运动模糊图像的PSF参数估计
4.1 运动模糊方向估计
实拍运动模糊图像与仿真图像对比,其频谱和倒谱均有较大差异。因此,很多基于频谱或倒谱的运动模糊方向估计算法对实拍图像的估计效果很差,大多数情况的估计角度为0°或90°。文献[12]、[13]提出在空域对模糊图像做不同角度微分后求和,最小值对应角度为模糊方向。空域法适用范围不局限于均速直线运动模糊,但其估计误差较大,特别当模糊图像纹理较少且存在大面积平滑区域时,将出现估计错误。文献[13]对仿真模糊图像的实验数据显示平均绝对误差在3°左右。实拍图像倒谱中沿运动方向的亮带非常微弱,但除十字亮线外,倒谱其他区域匀为黑色(低灰度值)。本文对倒谱处理后,由倒谱特征确定运动模糊方向。具体步骤如下:
(1)计算退化图像频谱G(u,ν),取对数形式log(1+G(u,ν))。
(2)对(1)中结果求傅里叶逆变换得退化图像的倒谱,记作Cg(p,q)。
(3)将倒谱转换为二值图像B(p,q)。转换阈值设为倒谱极小值(负数)的绝对值,即:

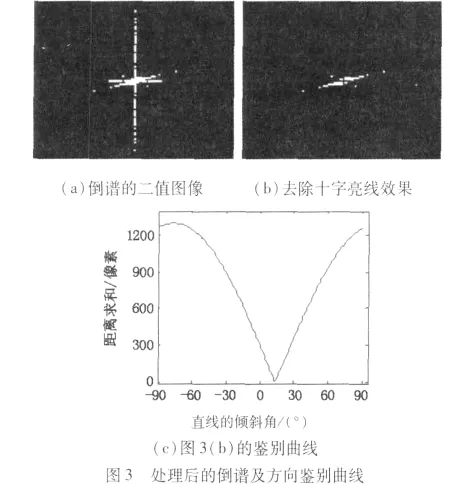
图3(a)是图2(d)对应的二值图像。
(5)过二值图像B(p,q)中心点(p0,q0)(十字亮线交点)作不同斜率直线,计算所有亮点到直线的距离并求和,最小值对应直线的倾斜角为模糊方向[14]。
过点(p0,q0),倾斜角为α的直线方程为:

设亮点坐标为(pn,qn),则亮点到直线的距离为:

由于α为90°时,斜率不存在,编程实现过程中,α取90°应单独处理,此时的。
B(p,q)中所有亮点到倾斜角为α的直线距离之和为:

图3(c)是图3(b)中-90°~+90°倾斜角与其距离求和对应曲线,鉴别模糊角度为13°。若要使鉴别精度达到小数点后一位数,则可设置倾斜角变化步长为0.1,减小步长后鉴别得图2(a)实拍图像的模糊角度为12.5°。
4.2 运动模糊尺度估计
对于实拍运动模糊图像,由于频谱中十字亮带干扰及暗条纹信息非常微弱,很难确定暗条纹位置;倒谱中反映模糊尺度的两负峰值点一般会被其他信息淹没,无法提取其坐标。所以,从频谱和倒谱中均无法估计出运动模糊尺度。在空域中,运动模糊会给图像在模糊方向带来相关性的变化,利用这种变化可以提取出PSF的模糊尺度[15]。相机和景物的相对运动造成的像素叠加,使得叠加像素轨迹内部的像素差分小于轨迹边缘点与邻近像素的差分,说明模糊轨迹内部的像素值更加相关。沿运动方向差分后图像的自相关函数是对称图像,有一个中心正峰和对称分布在正峰两边的负峰。正峰代表没有运动位移时与原始图像最相关,负峰代表图像移动模糊尺度个像素后与原始图像相关性最差。估计模糊尺度的具体步骤为:
(1)以图像g(x,y)中心为旋转轴,将运动模糊方向旋转至水平方向,得延水平方向运动模糊的图像 r(x,y);
(2)在水平方向上对旋转后的图像做一阶差分,得 r'x(x,y);

(3)对r'x(x,y)各行进行自相关运算,第i行的自相关函数表示为:

N和M分别为r'x(x,y)的列数和行数,这里i取1至M的整数,j取-(N-1)至(N-1)的整数。
(4)将c(i,j)各列求和得到一条鉴别曲线cadd(j);

(5)检测鉴别曲线cadd(j)两负峰值点距离即为模糊尺度的两倍。
对于大尺寸图像,为减小计算量和提高检测结果准确性,可剪切模糊图像中模糊特征较强的区域来估算模糊尺度。图4是图2(a)对应的鉴别曲线,检测模糊尺度为27像素。

图4 自相关曲线
5 实验与结果分析
由于对实拍运动模糊图像的PSF参数估计结果没有可参考的标准数据,为验证本文方法的有效性,把鉴别出的PSF代入维纳滤波复原算法对模糊图像进行复原,通过复原效果验证参数估计是否正确。维纳滤波器寻找一个使统计误差函数e2=E{(f-)2}最小的估计,E是期望值操作符,f是未退化的图像。该表达式在频域可表示为:
式中,H(u,ν)2=H*(u,ν)H(u,ν),H*(u,ν)表示 H(u,ν)的复共轭,Sη(u,ν)/Sf(u,ν)称为噪信功率比。而在实际应用中噪信功率比是难以估计的,通常用一常数K代替,在数值上取观测图像信噪比的倒数,对于无明显噪声干扰的实拍运动模糊图像,一般K取0.01左右可获得相对较好的复原效果。
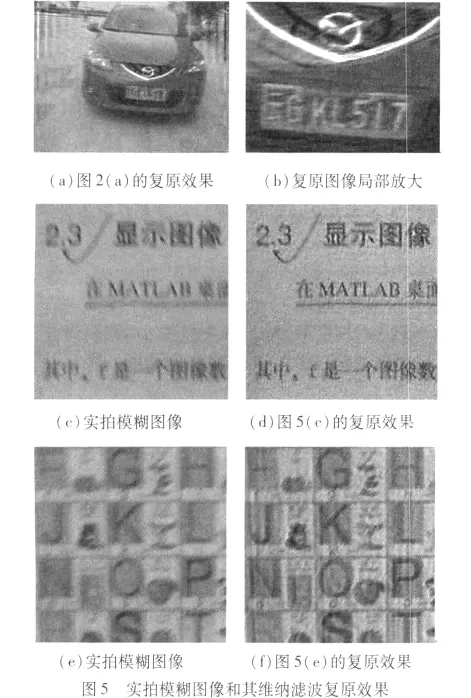
图5(a)、图5(b)是对图2(a)做维纳滤波复原的结果和局部放大效果,PSF由上节估计的模糊角度12.5°和模糊尺度27像素构造。视觉效果上看,复原后的图像已比较清晰,局部放大图中的马自达标志和云GKL517的车牌号能够辨识。另外,还对20幅实拍运动模糊图像进行退化参数估计和维纳滤波复原,复原效果均证明本文方法估计的模糊方向和模糊尺度正确。由于篇幅所限,仅提供其中的两幅模糊图像和复原效果如图5(c)~图5(f)所示。其中,图5(c)的估计PSF参数为-63°,9像素;图5(e)为27°,32像素。
6 结语
在运动模糊图像复原中,模糊方向和模糊尺度的正确估计是保证图像复原质量的关键。通过对比分析实拍运动模糊图像和仿真模糊图像的频谱和倒谱特征,说明文献中的算法虽然对仿真图像实验能取得很好效果,但不适用于对实拍模糊图像的参数估计。根据实拍模糊图像的倒谱特征和空域特征,提出把倒谱进行二值化再去除中心十字亮线后,进行模糊方向估计;以图像中心为旋转轴,将运动模糊方向旋转至水平方向后用差分自相关法确定模糊尺度。对几十幅实拍模糊图像进行PSF参数估计并把估计结果代入维纳滤波器复原图像,复原效果显示本文方法能正确鉴别实拍运动模糊图像的模糊方向和模糊尺度,有较好的实用性。实际应用中,剪裁图像纹理较多(模糊特征明显)的区域用于参数估计,能保证鉴别结果正确,同时减小算法计算时间。模糊尺度较大时,维纳滤波复原效果出现较强的振铃效应,下一步将进行图像复原算法和超分辨率重建方面的研究。
[1] Cannonm.Blind deconvolution of spatially invariant image blurs with phase[J].IEEE Transactions on Acoustics,Speech,and Signal Processing(0096 -3518),1976,24(1):58-63.
[2]Deng Zefeng,Xiong Youlun. Identification of motion-blur direction based on frequency-domain algorithm[J]. Opto-Electronic Engineering, 2007, 34( 10) : 98 - 101.(in Chinese)邓泽峰,熊有伦.基于频域方法的运动模糊方向识别[J].光电工程,2007,34(10):98 -101.
[3] Li Xiuyi,Huang Jifeng. Accurate estimation of the motion blur direction based on radon transform[J]. Computer Engineering & Science, 2008, 30( 9) : 51 - 52. ( in Chinese)李秀怡,黄继风. 基于Radon 变换的运动模糊方向精确估计[J]. 计算机工程与科学, 2008, 30( 9) : 51 - 52.
[4] Tanaka M,Yoneji K,Okutomi M. Motion blur parameter identification from a linearly blurred image[C]. International Conference on Consumer Electronics,Piscataway,2007: 1 - 2.
[5] He Weiguo,Li Shaofa.Estimating the blurring length of uniform linear motion blurred images[J].Journal of Computer Applications,2005,25(6):1316 -1317.(in Chinese)贺卫国,黎绍发.匀速直线运动模糊长度的精确估计[J].计算机应用,2005,25(6):1316 -1317.
[6] Li Yucheng,Jia Baohua,Yang Guong ming.Blur parameter identification and restoration ofmotion blurred image[J].Computer Engineering and design,2010,31(19):4247 -4249.(in Chinese)李宇成,贾宝华,杨光明.运动模糊图像的参数估计与恢复[J].计算机工程与设计,2010,31(19):4247-4249.
[7] Guo Hongwei. Accurate estimation of blurred motion direction based on edge detection of spectrum[J]. Journal of Computer Applications,2012,32 ( 3) : 770 - 772. (inChinese)
[8] Guo Yongcai,Guo Ruirui,Gao Chao.Identification of blur parameters from motion blurred images[J].Chinese Journal of Scientific Instrument,2010,31(5):1052 -1057.(in Chinese)郭永彩,郭瑞瑞,高潮.运动模糊图像点扩展函数的参数鉴别[J].仪器仪表学报,2010,31(5):1052 -1057.
[9] ZouWenjie.A new method of blind restoration ofmotionimage based on cepstrum method and algorithm of Richardson-Lucy[J]. Journal of University of South China: Science and Technology, 2010,24( 2) : 61 - 67.(in Chinese)邹文洁.一种新的基于倒谱法和Richardson-Lucy算法的运动图像盲复原方法[J].南华大学学报:自然科学版,2010,24(2):61 -67.
[10] XieWei,Qin Qianqing.Estimating blur parameters of point spread function ofmotion-blurred image based on cepstrum[J].Geomatics and Information Science of Wuhan University,2008,33(2):128 -131.(in Chinese)谢伟,秦前清.基于倒频谱的运动模糊图像PSF参数估计[J].武汉大学学报:信息科学版,2008,33(2):128-131.
[11] Le Xiang,Cheng Jian,Limin.Improved approach tomotion blur identification based on Radon transform[J].Infrared and Laser Engineering,2011,40(5):963 -969.(in Chinese)乐翔,程建,李民.一种改进的基于Radon变换的运动模糊图像参数估计方法[J].红外与激光工程,2011,40(5):963-969.
[12] Yitzhaky Y,Kopeika N S.Identification of blur parameters from motion blurred images[J].Computer Vision Graphic Image Processing:Graphical models and Image Processing,1997,59(5):310 -320.
[13] Chen Qianrong,Lu Qisheng,Cheng Lizhi.Identification of the motion blurred direction ofmotion blurred images[J].Journal of National University of defense Technology,2004,26(1):41 -45.(in Chinese)陈前荣,陆启生,成礼智.运动模糊图像的运动模糊方向鉴别[J].国防科技大学学报,2004,26(1):41 -45.
[14] Guo Hongwei,Tian Yimin,Fu Bo.Accurate detection of the motion blurred direction based on twice fourier spectrum[J].Journal of Yunnan University of Nationalities:Natural Sciences Edition,2012,21(4):301 -304.(in Chinese)郭红伟,田益民,付波.基于二次傅里叶频谱的运动模糊方向精确检测[J].云南民族大学学报:自然科学版,2012,21(4):301 -304.
[15] Guo Yongcai,Ding Xiaoping,Gao Chao. Identifying size of motion-blurred image based on difference auto-correlation method[J]. Opto-Electronic Engineering,2011,38 ( 6) : 134 - 140. ( in Chinese)郭永彩,丁小平,高潮.基于差分自相关的运动模糊图像尺度参数识别[J].光电工程,2011,38(6):134-140.
猜你喜欢
疯狂英语·新悦读(2022年8期)2022-09-20 01:32:12
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
空间科学学报(2021年6期)2021-03-09 06:20:14
陶瓷学报(2020年6期)2021-01-26 00:38:22
紫禁城(2020年8期)2020-09-09 09:38:04
测控技术(2018年7期)2018-12-09 08:58:22
统计与决策(2017年2期)2017-03-20 15:25:22
数学物理学报(2016年5期)2016-08-24 07:38:48
系统工程与电子技术(2016年2期)2016-04-16 05:17:08
无线电通信技术(2015年3期)2015-12-23 11:37:00
