基于MODIS云产品的AIRS像素云检测
2013-09-26 02:24王丹凤张记龙王志斌陈媛媛陈友华
自然资源遥感 2013年1期
王丹凤,张记龙,王志斌,陈媛媛,陈友华
(1.中北大学山西省光电信息与仪器工程技术研究中心,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
0 引言
搭载在地球观测系统(EOS)Aqua卫星上的大气红外探测器(AIRS,atmospheric infrared sounder)[1]具有较高的光谱分辨率,能够提供高精度大气温度、湿度和云结构的三维遥感观测数据[2],所提供的大气温湿数据已经被广泛应用于全球气候研究和天气预报。但由于AIRS数据的空间分辨率较低(13.5 km),对云进行检测还没有很好的算法[3],因此,研究一种适合AIRS数据的云检测算法用来确定其单个视场(像素)中的云特性具有重要意义。相对于AIRS而言,同时搭载在Aqua卫星上的中分辨率成像光谱仪(MODIS,moderate resolution imaging spectroradiometer)空间分辨率较高,可提供1 km分辨率的云掩模[4]、分类掩模[5]及云相态[6]等信息,具有的多光谱特性能捕捉到地气系统中云的精细结构,对云的检测能力超过 AIRS。因此,综合使用AIRS的探测功能和MODIS的成像功能,能为全球气候观测提供最佳信息[7-8]。
本文利用具有几何扫描特性的空间匹配算法匹配MODIS和AIRS的像素点,借助MODIS的云分类和云相态产品,利用MODIS云检测算法实现了基于MODIS云产品的AIRS像素云特性检测。利用匹配的1 km MODIS云分类结果可以确定AIRS视场内是部分还是全部被云覆盖,是单层云还是多层云;利用匹配的1 km MODIS云相态结果可以确定AIRS视场内是否包含水云、冰云或混合云信息[8]。这些信息将是晴空辐射校正、大气廓线反演和云微观物理特性反演的先决条件,对精确探测云分布状态具有重要的意义[9]。
1 MODIS和AIRS的空间匹配算法
用作空间匹配的2个探测器通常被分为主探测器和从探测器。所谓空间匹配,就是让从探测器在地面上的观测点重叠到主探测器的视野上[10]。本研究认为AIRS是主探测器,MODIS是从探测器。主探测器对地观测视野较大,有一些MODIS观测视场落在其中。探测器的视场往往不是规则的圆形(星下点除外)。当仪器的扫描角增大时,视野就逐渐变成数学上很难描述的“鸡蛋型”,这样就大大增加了算法的复杂性。假设一种较为普遍的情况,即要进行空间匹配的2个探测器载在不同的卫星上,如图1所示,主探测器在卫星M上,从探测器在卫星S上。假设主探测器的投影在地面上的视野是一个朝向卫星的大圆盘MAB,探测方向是ME方向。我们的目的就是寻找落在MAB视野中的所有从仪器的观测点。从主卫星M来看,如果从探测器在地面的投影点(如图1中F点)落在M卫星的视野MAB内,则认为主、从仪器的观测点重叠,此时斜距ME与MF的夹角应α小于圆盘的角半径θmax。通过夹角α不仅能确定是否有从观测点落在主视野内,而且还能确定在主探测器观测范围内每个从观测点所占的权重。如果从探测器的观测点位于MAB的边缘,那么就赋予此从观测点较小的权重;相反,若刚好落在MAB的中心,则赋予最大的权重。

图1 不同卫星上的主、从探测器观测视场重叠Fig.1 Observation view overlap of primary and secondary instruments from different satellites
基于上述空间匹配算法,本文的目的是寻找所有匹配在某个 AIRS视野内的 MODIS像素点。Auqa卫星上同时载有AIRS(主探测器)和MODIS(从探测器),即图1中的卫星M和卫星S重合。假设Auqa卫星高度为h km,则AIRS像素与匹配的MODIS观测点间最大的可能角度差θmax为[11]

如果AIRS到地面观测点间的斜距ME与MODIS到地面观测点的斜距MF之间的夹角α<θmax,则认为此MODIS观测点落在了AIRS视野内。根据夹角α的大小,给每个落在AIRS视野内的MODIS像素点赋予不同的权重值。如果2个探测器提供的几何信息是准确的,那么,二者空间匹配的精度可达到1 km[12]。寻找落在AIRS瞬时视场中的每个MODIS像素点的步骤如下:
1)从MODIS的地球定位资料MOD 03/MYD 03(可以从 http://ladsweb.nascom.nasa.gov/data/search.html网站获得)中提取每个像素点的经纬度。
2)给定任意AIRS观测点的经纬度,搜索与该点最近的MODIS像素点经纬度,采用的公式为

式中:x0,y0为给定的AIRS观测点经纬度;x,y为MODIS像素点经纬度;dmin为两者间的最近距离。
3)以这个最近的MODIS像素点为中心,向外寻找邻近的MODIS点,这些点的斜距与AIRS斜距间的夹角须小于θmax。
4)记下落在AIRS视野内的所有MODIS像素点的索引及权重。
2 MODIS云检测原理和方法
2.1 云分类检测原理和方法
云的分类检测主要是基于云在可见光和红外波段与植被、土壤、雪和下垫面等的反射率和辐射亮温具有差异的原理[13]。MODIS分类检测方法不仅可以鉴别出不同的云类型,而且可以鉴别出高云、低云等云层信息。
首先由MODIS云掩模信息定义一个训练区,选择一个初始分类中心,利用逐次迭代的方法对像素进行转换。当迭代结果达到预设定的条件时,迭代结束;否则进行下一次迭代,直到满足条件为止。迭代分类算法中使用了3个参数(不同波段反射率、辐射强度差异和光谱亮温差异)[14],所有参数分辨率都是1 km。用此方法,可以把每个MODIS像素的云类型分为低云、中云和高云。
2.2 云相态检测原理和方法
若要进一步判断云的特性,还需进行云相态检测。本文使用的MODIS云相态检测算法是业务上的红外相态算法。云相态检测原理[15]是:在8.5~11 μm波长范围内(对应MODIS的红外光谱通道),水滴和冰晶微观物理和光学性质不同。光学厚度大的水云在8.5 μm波长处的辐射值远低于11 μm处的辐射值,因此,当辐射值之差 BTD8.5~11≤-2 K时,判断为水云;短波中因为有强水汽吸收作用导致晴空中8.5 μm波长处的辐射值低于11 μm处的,因此,当辐射值之差-2 K < BTD8.5~11≤0 时,判断为晴空;冰晶在8.5 μm波长处的吸收远远小于在11 μm处的吸收,因此,冰晶组成的卷云(冰云)在8.5 μm处的辐射值高于11 μm 处的辐射值,二者辐射值之差 BTD8.5~11≥0 K。
依据上述原理,可判别出云相态信息,具体流程如图2所示。
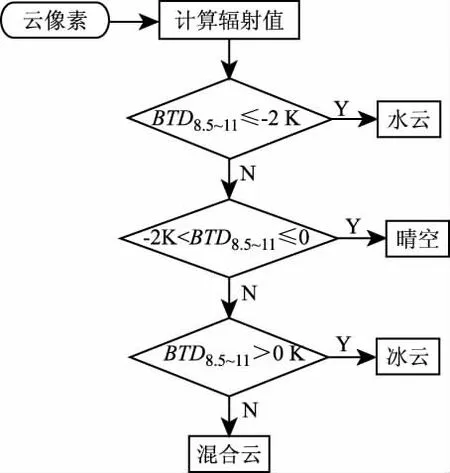
图2 MODIS云相态检测算法流程图Fig.2 Flowchart of MODIS cloud phase detection algorithm
上述云相态算法将每个MODIS云像素分别分类为不确定相、混合相、冰、水或者晴空。由此,通过判断空间匹配的MODIS像素点的云相态就可判别AIRS 像素的云相态[16]。
3 AIRS像素云检测结果与分析
3.1 检测结果
图3为2002年9月6日AIRS第193景数据的第763通道(波数901.69 cm-1)亮度温度(BT)图,图上冷云由蓝色表示。
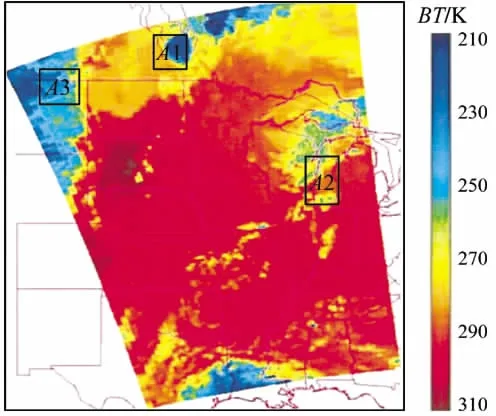
图3 AIRS亮度温度图(A1,A2,A3为研究区域)Fig.3 AIRS BT image(A1,A2,and A3 are study areas)
根据上述几何扫描空间匹配算法,制作了与AIRS匹配的MODIS亮温图,图4显示了A1研究区(见图3中标注处)与AIRS视野匹配的MODIS 11 μm波长处的亮温图。
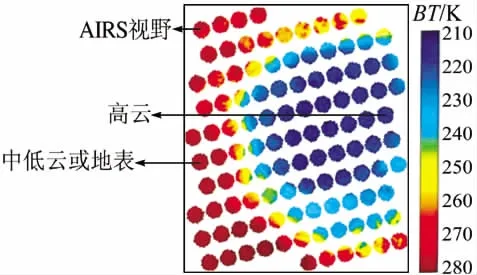
图4 A1研究区中与AIRS匹配的MODIS亮温图Fig.4 MODIS BTs image matching to AIRS of A1 area
图4 上每个圆圈代表一个AIRS视野,大部分AIRS视野是均匀的。每个AIRS视野中大概有100~200个MODIS像素点。亮温值高的代表中低云或者地表,亮温值低的代表高云。借助于MODIS观测值,AIRS视野可显示出更精确的云特性。本文应用上述MODIS云特性检测算法,实现了AIRS像素云的检测,其结果如图5所示。
由图5可知,应用MODIS云相态掩模可检测出AIRS视野中的冰云和水云;应用MODIS分类掩模可检测出AIRS视野中的单层高云和低云;云相态产品上的水云和冰云模式和MODIS云分类产品上的低云和高云模式是相对应的。另外,利用匹配的MODIS云分类掩模还可检测出AIRS视场中的单层云和多层云等相关信息。
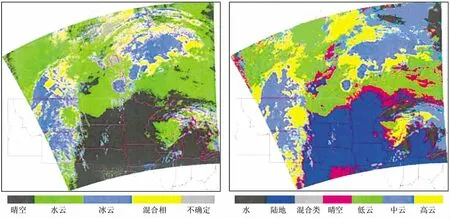
图5 与AIRS匹配的MODIS云相态掩摸(左)和云分类掩摸(右)Fig.5 MODIS cloud phase mask(left)and classification mask(right)
图6 显示了利用匹配的MODIS 1 km云分类 产品检测出的AIRS像素云。

图6 MODIS云分类掩模检测的AIRS像素云视场Fig.6 AIRS pixel cloud field identified by MODIS classification mask
由图6可以看出,大约55%的AIRS视场是晴空,22%是单层云,23%是多层云。这与图3在直观视觉上吻合得很好。对检测结果的进一步验证及对云参数等的检测,还需在后续工作中进行。
3.2 结果分析
由以上检测结果可知,利用几何扫描的空间匹配算法,实现了MODIS和AIRS像素点的匹配;再结合MODIS的云产品和业务上的云分类、云相态检测方法,实现了利用MODIS数据检测AIRS像素云的目的。另外,利用MODIS云分类掩模还可检测出AIRS视场中的单层云和多层云。
由图5的MODIS云相态和云分类检测结果可知,采用MODIS云相态掩模检测出了AIRS视野中的冰云、水云和混合云;采用MODIS云分类掩模检测出了AIRS视野中的高云、低云和中云。云相态产品上水云和冰云的模式与云分类产品上的低云、高云模式是相对应的。也就是说,利用MODIS云相态产品对冰云或者水云的确认相当于利用MODIS云分类产品对单层云的确认;有些AIRS视场中存在混合云相态,相当于分类产品中的多层云。因此,采用与AIRS视野匹配的1 km空间分辨率的MODIS云分类掩模产品还可以确定每一个AIRS视野中有几层云的存在,这点在图6中得到了验证。
4 结论
1)利用具有几何扫描特性的空间匹配算法可以对MODIS数据和AIRS数据进行空间匹配。这是使用MODIS数据检测AIRS像素云的基础。
2)利用与AIRS视野匹配的MODIS云相态掩模可以检测出AIRS视野中的冰云、水云和混合云。这在利用云微观物理特性对AIRS像素云相态进行检测是很重要的,因为云散射模型需要云相态信息。
3)采用与AIRS视野匹配的MODIS云分类掩模可以检测出AIRS视野中的低云、高云和中云,并与MODIS云分类产品检测出的低云和高云有很好的对应。这为AIRS的廓线检测和认证提供了重要信息。
4)采用与AIRS视野匹配的MODIS云分类掩模还可以确定每个AIRS视野中有几层云的存在。这在单层—多层云参数的初始反演中是很重要的。
[1]Aumann H H,Chahine M T,Gautier G,et al.AIRS/AMSU/HSB on the Aqua mission:Design,science objectives,data products,and processing systems[J].IEEE Tran sactions on Geoscience and Remote Sensing,2003,41(2):253-264.
[2]Susskind J,Reuter D,Chahine M T.Cloud fields retrieved from analysis of HIRS2/MSU sounding data[J].Journal of Geophysical Research,1987,92(4):4035-4050.
[3]Li J,Schmit T J,Menzel W P,et al.Advanced baseline imager(ABI)for future geostationary operational environmental satellites(GOES-R and beyond)[C]//Menzel W P.Applications with Weather Satellites.USA:SPIE,2002,4895:111-122.
[4]Ackerman S A,Strabala K I,Menzel W P,et al.Discriminating clear sky from clouds with MODIS[J].Journal of Geophysical Research,1998,103(24):32141-32157.
[5]Li J,Menzel W P,Yang Z D,et al.High- spatial- resolution surface and cloud-type classification from MODIS multispectral band measurements[J].Journal of Applied Meteorology,2003,42(2):204-226.
[6]Baum B A,Kratz D P,Yang P,et al.Remote sensing of cloud properties using MODIS airborne simulator imagery during SUCCESS 1.data and models[J].Journal of Geophysical Research,2000,105(9):11767-11780.
[7]Zhang H,Hung L H,Agnes L,et al.Analysis and characterization of the synergistic AIRS and MODIS cloud cleared radiances[J].Frontiers of Earth Science in China,2010,4(3):363-373.
[8]Li J,Menzel W P,Zhang W,et al.Synergistic use of MODIS and AIRS in a variational retrieval of cloud parameters[J].Journal of Applied Meteorology,2004,43(11):1619-1634.
[9]官 莉.星载红外高光谱资料的应用[M].北京:气象出版社,2007:21-22.Guan L.Spaceborne infrared hyperspectral data application[M].Beijing:Meteorological Press,2007:21-22.
[10]Nagle F W.The association of disparate satellite observations[C]//Phoenix A Z.Second symposium on integrated observing systems.American Meteorological Society,1998:49-52.
[11]Frey R A,Ackerman S A,Soden B J.Climate parameters from satellite spectral measurements,part I:Collocated AVHRR and HIRS/2 observations of spectral greenhouse parameter[J].Climate,1996,9(2):327-344.
[12]官 莉,王振会.用空间匹配的MODIS云产品客观确定AIRS云检测[J].气象科学,2007,27(5):516-521.Guan L,Wang Z H.Objective determintion of AIRS cloud mask using colocated MODIS cloud mask[J].Scientia Meteorologica Sinica,2007,27(5):516-521.
[13]Haertel V,Landgrebe D A.On the classification of classes with nearly equal spectral response in remote sensing hyperspectral image data[J].IEEE Transactions on Geoscience and Remote Sensing,1999,37(5):2374-2385.
[14]何全军,曹 静,黄 江,等.基于多光谱综合的MODIS数据云检测研究[J].国土资源遥感,2006,18(3):19-22.He Q J,Cao J,Huang J,et al.Cloud detection in MODIS data based on multi- spectrum synthesis[J].Remote Sensing for Land and Resources,2006,18(3):19-22.
[15]包书新.基于MODIS数据的云识别研究[D].长春:吉林大学,2008.Bao S X.Cloud recognition using MODIS data[D].Changchun:Jilin University,2008.
[16]梁守真,施 平,邢前国.MODIS NDVI时间序列数据的去云算法比较[J].国土资源遥感,2011,23(1):33-36.Liang S Z,Shi P,Xing Q G.A comparison between the algorithms for removing cloud pixel from MODIS NDVI time series data[J].Remote Sensing for Land and Resources,2011,23(1):33-36.
猜你喜欢
现代农村科技(2021年2期)2021-03-15
现代电子技术(2021年1期)2021-01-17
红外技术(2020年1期)2020-05-25
绿色科技(2019年12期)2019-07-15
微型电脑应用(2019年1期)2019-01-23
科学大众(中学)(2018年11期)2018-12-27
农业与技术(2018年17期)2018-10-10
电脑知识与技术(2018年35期)2018-02-27
科技视界(2016年19期)2017-05-18
自动化学报(2017年11期)2017-04-04