基于ADXRS450的角度测量电路设计※*
2013-09-21 10:44:24白宗文
单片机与嵌入式系统应用 2013年6期
白宗文
(延安大学 物理与电子信息学院,延安 716000)
引 言
现代陀螺仪是一种能够精确地确定运动物体方位的仪器,作为一种惯性测量器件,是惯性导航、惯性制导和惯性测量系统的核心部件。它是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪器[1,3-4]。
传统的陀螺仪体积大,功耗高,易受干扰,稳定性较差,ADI公司推出了新型速率ADXRS系列陀螺芯片,该系列芯片组成的角速度检测陀螺仪能够准确地测量角速度,此外还可以利用该陀螺仪对角度进行测量,本文利用该先进的角速度检测传感器设计出电路简单、精度高、具有重要应用价值的实际电路。
ADXRS450[5]是基于ADI公司前三代MEMS开发的第四代器件的具有可编程电源电压的数字角速率传感器,它采用先进的差分四传感器设计,可在强烈冲击和振动状态下精确地工作。它在单芯片上实现完整的角速度陀螺仪功能,角速率检测达到了±300°/s,可在宽频率范围内提供高振动抑制特性,且具有极佳的零点失调稳定性,具有内部温度补偿,抗冲击能力达2000g,16位数据字SPI数字输出。ADXRS450具有低噪声和低功耗、低电源供电、小巧便捷等优点,主要用于医疗、工业、仪器仪表、和其他高性能应用。这款陀螺仪具有极佳的抗冲击和振动能力,适合恶劣环境下的应用。
1 工作原理
ADXRS450使用谐振器陀螺仪原理工作[5-6],每种检测结构均包含一个扰动框架,通过静电驱动到达谐振状态。这会产生必要的速度,从而在旋转期间产生科里奥利力。当检测结构旋转时,产生的科里奥利力耦合至外部检测框架,该框架包含置于固定捡拾器指之间的可动指。
这样便形成一个容性捡拾结构来检测科氏运动。检测到的信号被馈送至一系列增益和解调级,产生电速率信号输出。4路传感器设计以机械方式耦合4种检测结构,使外部重力表现为共模信号,而后者可通过ADXRS450中实施的完全差分架构来消除,因而可抑制线性加速度和角加速度,包括外部重力和振动。
ADXRS450功能框图如图1所示。
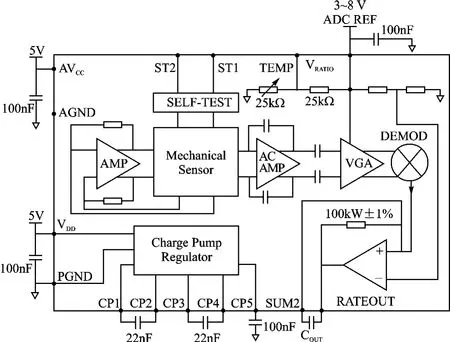
图1 ADXRS450功能框图
ADXRS450陀螺仪使用完整的机电自测功能,静电力施加于陀螺仪框架后造成容性检测指偏转。这一偏转恰好等于外部速率输入引起的偏转。波束结构的输出与真实速率输出信号均由相同的信号链进行处理,从而提供完整的电气和机械成分。
在器件以高于输出带宽的速率工作期间,机电自测连续执行。自测程序产生等效的正负速率偏转。该信息可被滤除,对解调速率输出没有影响。将正负自测偏转间的差异幅度滤波至2Hz。连续监控并与硬编码自测限值进行比较。
2 硬件设计
本电路系统由电池供电电源管理单元、倾角传感器电路、信号调理电路、微控制器和键盘及显示电路组成,如图2所示。其中,微控制器实现系统的控制,利用SPI接口与倾角传感器通信,电池供电电源管理单元向其他各单元提供合适的电压。显示电路及键盘电路实现测试结果的输出和参数及命令的输入。其中显示电路及键盘电路属于常见的电路,限于篇幅关系,此处不作详细讨论,重点介绍角度测量电路。
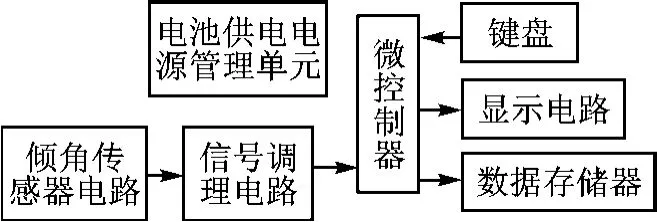
图2 系统框图
角度测量电路由微控制器ADuC7026、角速率传感器和电压增益控制电路构成,如图3所示。其中ADXRS450是具有可编程电源电压的数字角速率传感器,用于检测角速度,使用时无需进行模/数转换,从而可以节省系统成本和电路板面积。AD8034是运算放大器,DAC0引脚输出静态电压,然后由AD8034放大。ADuC7026是精密模拟微控制器[7],该芯片内集成1Msps、12位、多通道高性能ADC的数据采集系统、32位 MCU和Flash/EE存储器。其ADC具有多达12个单端输入通道,另外还有4个ADC输入通道也可以和4个DAC的输出引脚复用。本设计主要利用其高精度特性和内部的4路DAC,此外ADuC7026可以通过SPI接口与ADXRS450进行通信,该接口利用ADuC7026内部的数模转换器(DAC)设置ADXRS450的电源电压。此外还可用于与LabVIEW接口通信等,并且可以监控角速率输出。接口电路如图4所示。

图3 角度测量电路

图4 ADXRS450接口电路
3 软件设计
本系统中软件设计的关键是将命令字根据SPI通信协议和ADXRS450的工作时序写入到其相应的命令字控制器中,ADXRS450工作时序图如图5所示。ADuC7026以16位格式、固定速率向相应的寄存器写入故障检测命令字、存储寄存器命令字等,每个寄存器为8位,但执行读取请求时数据最终以16位消息形式返回,高8位在前,低8位在后,详细的命令字格式请参照数据手册。软件用C语言编程。
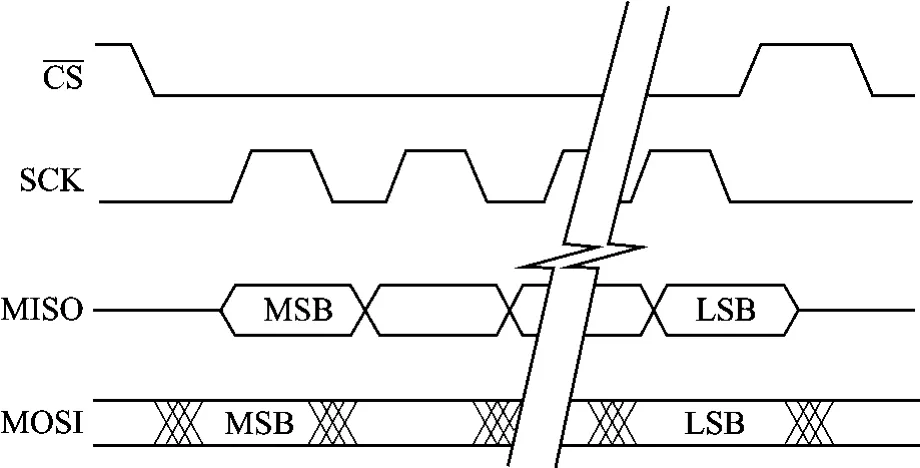
图5 ADXRS450工作时序图
ADXRS150和ADuC702的通信时该接口的命令设置和格式定义如下:时钟相位=时钟极性=0
此外,初始命令的器件响应为0x00000001。这可以防止初始命令/响应交换时传输随机数据至主器件,ADXRS450的引脚功能如表1所列。
采样程序见本刊网站 www.mestnet.com.cn。
4 实验数据分析
表2给出了陀螺仪转动±30°、±60°、±90°、±120°、±150°和±180°时的输出结果。
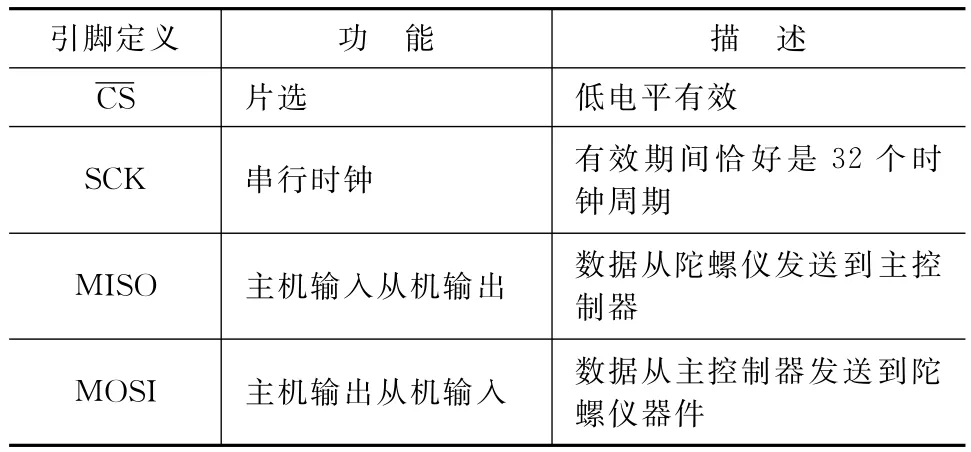
表1 ADXRS450功能引脚定义
为减小误差,在程序中采用了多次测量并舍弃最大和最小值然后求平均的方法,在硬件设计中选择了精密模拟微控制器ADuC7026,尽量减小A/D转换时数据舍弃的误差。实验结果表明:角度相对误差小于0.5%,有较高的精度。
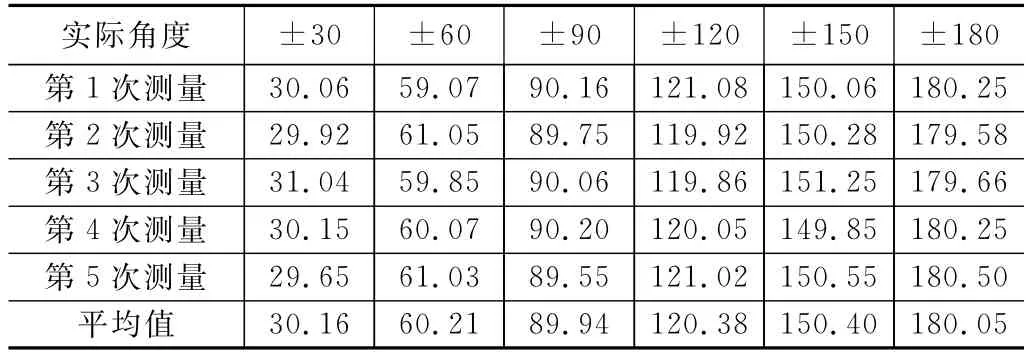
表2 角度测量结果单位:(°)
结 语
本文利用ADXRS450数字角速率传感器和ADuC7026设计出了角度测量系统,其角度测量范围为0°~360°,分辨率为0.1°,采用LCD显示器件实时显示测量角度。该系统具有尺寸小、功耗低、抗冲击和振动性好的优点,且电路结构简单,能精确测量转动物体的偏转角度,适用于各种惯性测量系统,是陀螺仪技术的一个典型应用,具有较高的应用价值。
[1] 何立民.单片机应用系统设计[M].北京:北京航空航天大学出版社,1997:78-132.
[2] 夏路易.智能仪表设计与接口技术[M].太原:太原理工大学出版社,2009:180-196.
[3] 黄然,吕紫旭,金惠华.基于角速度传感器与DSP的三维陀螺仪[J].单片机与嵌入式系统应用,2006(9):53-58.
[4] 沙占友,王彦鹏,张永昌.单片偏航角速度陀螺仪的原理与应用[J].传感器世界,2004(9):31-34.
[5] ADI.ADI实验室电路合集[M].北京:北京航空航天大学出版社,2011:87-89.
[6] ADI.ADXRS450DataSheet,2013.
[7] ADI.ADUC7026DataSheet,2013.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
中国生殖健康(2019年6期)2019-01-06 09:20:40
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
电子制作(2017年14期)2017-12-18 07:07:58
中学生数理化·八年级数学人教版(2017年2期)2017-03-25 16:46:44
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
电子设计工程(2014年18期)2014-02-27 12:00:35