
飞机尾旋三维测量试验的改进方法
2013-09-21 07:52黄会明刘先勇
实验流体力学 2013年2期
黄会明,刘先勇,马 军,宋 晋
(1.西南科技大学,四川绵阳 621010;2.中国空气动力研究与发展中心,四川绵阳 621010)
0 引言
随着中国航天事业的快步发展,飞机的研制尤其是战斗机的研制也进入一个高速进步时期。在研究飞机各项性能时对飞机尾旋的研究始终贯穿在飞机型号研制的整个过程。进行飞机尾旋特性的研究的主要手段就是在立式风洞中进行飞机自由尾旋实验。飞机自由尾旋实验能有效地得到飞机尾旋的特征。航空发达国家在上个世纪40年代就开始了对飞机尾旋的研究[1]。2005年在中国空气动力研究与发展中心建成的φ5m立式风洞获得成功,这标志着我国立式风洞已经具备开展型号自由飞尾旋试验的能力[2-3],填补了国内该项试验研究空白。
尾旋又称螺旋,是指飞机在持续失速状态下,以很小的半径沿很陡的螺旋航迹一面旋转、一面高度急剧下降的现象,其直接后果通常就是机毁人亡。立式风洞就是专门为研究飞机尾旋试验而建造的地面模拟设备,自由飞尾旋试验可为飞行员提供如何将飞机改出尾旋的方法,对飞机特别是军用飞机发挥着十分重要的作用。
将机器视觉技术[4]引入到飞机尾旋的实验,使尾旋的测量变得更加简易。机器视觉的主要任务就是从二维图像中得到物体的三维信息。在基于双目相机的特征点三维测量中,通过对一系列图像的检测获得图像点坐标,然后求出这些点的三维坐标。由于物体的刚体结构不变性,只要能计算出物体上3个以上特征点的三维坐标,那么物体的运动姿态就可以根据这些三维信息获得。
1 标记点的设计与检测
飞机尾旋实验生成的图像数据量较大,如何精确、高效地获得图像数据很重要。传统方法在测量的时候对标记点的检测采用T型标记和十字叉型标记,通过获得标记的形心来进行定位,如图1所示。

图1 标记方法Fig.1 Marking method
这种T型标记和十字叉型标记[5]的布局与测量目标有关,在做标记时对标记粘贴的位置需要进行严格的测量和计算,使整个标记特征集合对于飞机机身结构呈对称分布,如图2所示。

图2 传统标记粘贴方式Fig.2 Label pasting mode
这种设计标记方式显然费时费力,且不具备很好的灵活性。并且同样的T型标记或十字叉型标记不易区分,在对图像点进行匹配的时候很难做到自动匹配。考虑到这种不方便性,因此在对飞机尾旋测量时采用了一种新的标记方法,即编码标记点[6],如图3所示。
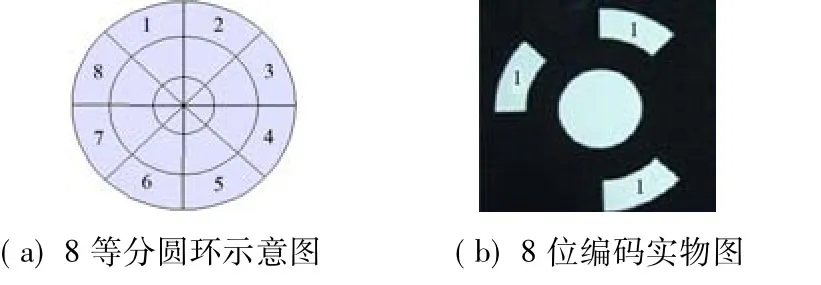
图3 8位编码Fig.3 Code point of eight bit
其原理[7-8]是将一个大圆的外环分割成等间隔的8等分,中间圆作为定位圆。对每一份的外环白色区域记为1,黑色区域记为0,组成一个8位的二进制。将二进制通过移位化成最小的十进制得到一个唯一的十进制编码。如图(b),对应的8位最小二进制为00100101,编码号为37。
将不同的编码标记点分别粘贴在飞机模型的不同位置上,并且标记的大小可以根据模型的大小进行调整。如图4某飞机模型上粘贴的编码点。
对编码标记的定位与编码需要经过一定步骤的图像处理操作,其基本流程图如图5所示,主要的目的是检测到编码标记上圆心坐标和编码的码值。

图4 飞机模型上的编码点Fig.4 Code points on the model of airplane
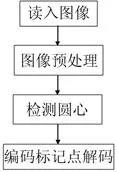
图5 编码点定位与解码流程图Fig.5 Flow chart of location and decoding
图4 所示的某飞机模型上的每一个编码点都有它唯一的编码值,在后期三维重建中图像点匹配[9]的时候,只需要找到左右相同编码值的图像坐标之后就可以进行匹配操作。相对于T型标记和十字叉型标记,编码标记可以使用很多不同的编码,相比于传统的标记点具有更高的灵活度。
2 三维测量
2.1 相机成像模型
摄像机的成像模型在理想情况下为针孔透视变换模型,如图6所示。Owxwywzw为世界坐标系;Oxyz是摄像机坐标系;O'XY是摄像机像面坐标系;O″uv是计算机图像坐标系。从世界坐标系Owxwywzw到相机坐标系Oxyz的变换关系为:

式中,R旋转为正交矩阵,T为平移矢量。
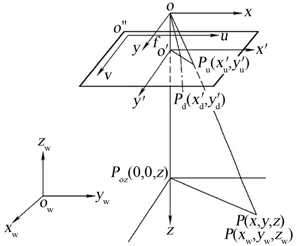
图6 摄像机成像模型Fig.6 The imaging model of camera
2.2 双目三维重建模型
双目立体视觉利用立体视差的原理,获得同一个三维点P的二幅不同图像I1、I2,通过寻找P点在两幅图像上的匹配像点 P1(u1,v1)和 P2(u2,v2),计算得到该点的三维坐标。
空间点在双摄像机中的成像关系,如图7所示。OwXwYwZw为空间世界坐标,C1,C2表示两个摄像机,O1,O2分别为两个摄像机对应的光心。空间点P在C1中成像的像素点为p1,像素坐标为(ul,vl),P点在C2中的像素点为p2,坐标为(ur,vr)。当世界坐标系建立在C1上,以针孔模型为摄像机成像模型,则根据空间几何关系可以推导出空间点P(x,y,z)的三维坐标。
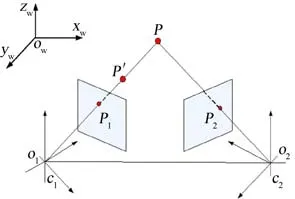
图7 双目视觉Fig.7 Binocular vision
要想获得特征点的三维坐标信息,首先就要对双目相机进行标定。对双目相机的标定采用基于平面靶标的方式进行标定[10-11],该方法主要是张正友提出的。设靶标平面上的三维点记为M=[X,Y,Z]T,其映射到像平面上的点记为m=[u,v]T,三维点和图像上平面点相应的齐次坐标分别为 ~M=[X,Y,Z,1]T=[u,v,1]T。摄像机是基于针孔模型,空间点与图像点之间的映射关系为:

其中,s为一个任意的非零尺度因子,旋转矩阵R与平移向量t称为摄像机外部参数矩阵。A称为摄像机内部参数矩阵。定义为:

其中,(u0,v0)为主点坐标,α、β分别是 u轴和v轴的尺度因子,γ是u轴和v轴不垂直因子。不失一般性,可以假设靶标平面位于世界坐标系的xy平面上,即z=0。对(1)式进行展开:
根据相机参数之间的内在约束,通过奇异值分解(SVD)法和Cholesky矩阵分解算法求得相机的内参数A和外参数R和t。
对双目相机进行内外参数标定完之后,根据图像点的匹配数据进行三维重建,求出空间点的三维坐标,如公式(3):
其中,(fl,fr)表示左右摄像机的焦距,(Xl,Yl),(Xr,Yr)分别表示空间点在左右摄像机像面上匹配的坐标,(ul,vl)表示空间点在采集图片上的像素坐标,(u0,v0)表示主点坐标。
3 飞机姿态的计算与误差分析
描述飞机尾旋运动姿态的参数主要是俯仰角α、滚转角φ,偏航角β。图8中OXYZ为机体坐标系,原点O为飞机质心,X轴方向为机翼方向;Y轴方向由机头指向机尾;Z轴垂直向上。

图8 飞机坐标系与风洞坐标系Fig.8 Coordinate systems of airplane and wind tunnel
OwXwYwZw为风洞坐标系,轴Xw,Yw在水平面上,轴Zw平行于地面坐标系的铅垂线方向。因此飞机俯仰角是机体纵轴Y与水平面XwYwZw的夹角;滚转角是机体横轴X与与水平面XwOwZw的夹角;偏航角是机体纵轴Y在水平OXYZ面XwOwYw上的投影与Xw轴之间的夹角。
由于飞机姿态角的定义是机身坐标系和地面坐标系之间的关系,因此只需要计算两个坐标系之间的关系就可以知道模型姿态。首先利用三坐标机或其它三维测量工具,获得粘贴在飞机上编码点的圆心三维坐标,坐标系建立在飞机机身上,如图8的坐标系OXYZ。设在坐标系OXYZ下机身上编码点的三维坐标为(Xi,Yi,Zi)(i=1,2…n)。设在风洞坐标系OwXwYwZw下利用双目相机重建的编码点三维坐标为(xi,yi,zi)(i=1,2…n)。对于两个坐标只需要找到3个以上公共点就可以计算出两个坐标系的旋转平移关系[12]。设OXYZ到OwXwYwZw的转换关系为R,T,则有:
通过分解旋转矩阵法[13],可以计算出旋转矩阵R和平移向量T。
根据飞机模型姿态角的定义,可以将其转化为两个坐标系的坐标轴之间的关系。俯仰角α是机体纵轴Y与水平面OwXwYwZw的夹角,可以转化为纵轴Y与竖轴Zw之间夹角;滚转角φ可以转化为横轴X与竖轴Zw之间的夹角;偏航角β可以转化为纵轴Y在XwOwYw面的投影与纵轴Xw之间的夹角。在求角度时需要在同一个坐标系下求解,即需要将轴X、轴Y组成法向量转换到OwXwYwZw风洞坐标系下。即:

其中,X=[1,0,0],Y=[0,1,0];X″=[X'x,X'y,0],X'、Y'为转换到风洞坐标系下的法向量;X″为 X'在OwXwYwZw平面上的投影,R,T为OXYZ到OwXwYwZw的转换关系。设Zw=[0,0,1],3个角度可以定义如下:

在求角度的时候只要保证重建三维坐标的精度就能保证角度计算的精度。将风洞坐标系下重建的三维特征点坐标对齐到机身坐标系下的三维特征点,然后比较同一坐标系下对应三维点的点距,即:

ei表示第i次的测量误差,ei的平均值代表系统整体误差。在角度计算时实际上是计算两个坐标系之间的转换误差,因此重建的误差即是角度计算的误差。
4 实验
实验使用的是双目视觉立体测量系统,系统的硬件如下:两台 CV-A70CL高速工业相机,分辨率为1280pixel×1024pixel;光 学 镜 头 使 用 Computar M1214-MP镜头,焦距为16.00 mm。被测物体距离相机约5.0m,双目相机基线距离2.0m。将某型号的飞机模型置于立式风洞的上方,开启风洞使其做尾旋运动。利用高速双目相机同步采集飞机尾旋运动时的图片。
实验的第一步是根据相机的视场范围将标定板摆放7~35个不同位置,然后对双目相机进行标定,平板由99个圆组成,尺寸大小为600mm×800mm。利用双目相机同时采集图片,并检测左右相机拍摄的标定板图片上的圆心坐标,如图9所示。在对平板上的圆心检测完之后,根据平板标定法[7]标定出左右相机的各个参数,如表1所示。

图9 标定板检测结果Fig.9 Detection result of calibration plate

表1 相机内参数Table 1 Internal parameters of cameras
标定完成之后将飞机模型投入到立式风洞中,利用高速同步相机采集飞机模型在尾旋运动时的图片。采集图片完成之后对图片进行标记点定位和解码处理。在试验中一共采集了160对图像,其中一对图像检测结果如图10所示。根据标定和标记点定位的结果,在风洞坐标系下重建的三维特征点如图11所示,数字表示的是特征点编码的码值。

图10 编码点检测结果Fig.10 Detection result of code points
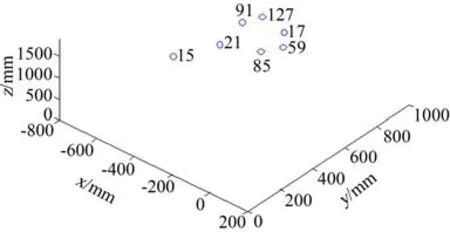
图11 飞机三维点Fig.11 Airplane's three-dimensional points
待飞机三维特征点计算完成之后,根据(4)式和(5)式,将重建的三维特征点与机身坐标系下的三维点进行坐标转换,计算出两坐标系的关系。然后计算出俯仰角、滚转角、偏航角。在160对图像计算的时候排除重建的三维点少于3个的情况,并且将误差ei设置在ei<1.0mm范围内。对某次试验的结果如图12所示,其中(a)俯仰角的变化在80°~90°之间;(b)滚转角在-15°~15°之间;偏航角的积分情况如(c)所示,出现空缺的部分表示某一时刻的角度因为三维点少于3个或者误差较大而无法计算,排除这些情况之后一共有145对成功计算,数据有效率90.6%。三维重建误差分布如(d)所示,系统平均误差为0.456mm、方差为0.180。因此各个姿态角度的误差能保证在±1°以内。
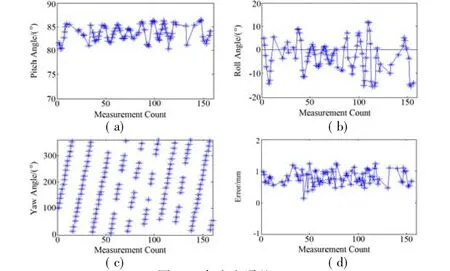
图12 角度和误差Fig.12 Angle and error
5 结论
改进的飞机尾旋运动三维测量系统实现了全自动测量,将离线采集的图片导入系统中就能够自动计算,处理160对图片的时间大约需要5min,数据利用率在90%以上。在5m的距离、3m×4m的视场下,三维重建的误差在0.456mm左右;各个角度的误差能保证在±1°以内。改进的系统在中国空气动力研究与发展中心的立式风洞中得到了成功的应用,并且适合各种飞机模型,具有开展此类飞机尾旋运动研究的普遍适用性。
[1] EFREMOV A A,et al.Investigation of LE-500 aircraft spin characteristics by the results of free-spinning model test in T-105 vertical wind tunnel of TeAGI[R].2005,11(09):131-136.
[2] 马军,蒋敏.5m立式风洞尾旋试验测量系统改进设计[C]//第二届近代实验空气动力学会议论文集,中国空气动力学会,2009:137-143.
[3] 祝明红,王勋年,李宝,等.5m立式风洞尾旋试验技术[J].实验流体力学,2007,21(3):49-53.
[4] 马颂德,张正友.计算机视觉[M].北京:科学出版社,2003.
[5] 罗武胜,李沛.基于计算机视觉的飞机尾旋运动姿态测量方法[J].电子器件,2008,31(3):992-995.
[6] 范宏生.工业数字摄影测量中人工标志的研究与应用[D].解放军信息工程大学,2006,21(2):34-38.
[7] AHN SJ,RAUH W,RECHNAGEL M.Ellipse fitting and parameter assement of circular object targets for robot vision[C]//Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems,Kyongju Korea,1999:525-530.
[8] 段康容,刘先勇.摄影测量中编码标记点检测算法研究[J].传感器与微系统,2010,29(8):74-78.
[9] 刘先勇,袁建英,邱志强,等.近景摄影测量系统中非编码点匹配算法研究[J].工具技术,2009,44(6):94-97.
[10] ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[11]TSAI R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-theshelf TV cameras and lenses[J].IEEE Journal of Robotics and Automation,1987,3(4):323-344.
[12]EGGERT D W,LORUSSO A,FISHER R B.Estimating 3-D rigid body transformations:a comparison of four major algo rithms[J].Machine Vision and Application,1997,9:272-290.
[13]冯其强,李广云,黄桂平.基于自动定向棒和编码标志的像片概略定向[J].红外与激光工程,2008,37(4):132-136.
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24
小哥白尼(野生动物)(2020年3期)2020-07-27
汽车维修与保养(2020年11期)2020-06-09
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
数学大王·中高年级(2018年11期)2018-12-17
电子制作(2017年23期)2017-02-02
办公自动化(2016年18期)2016-12-17
电子制作(2016年19期)2016-08-24
